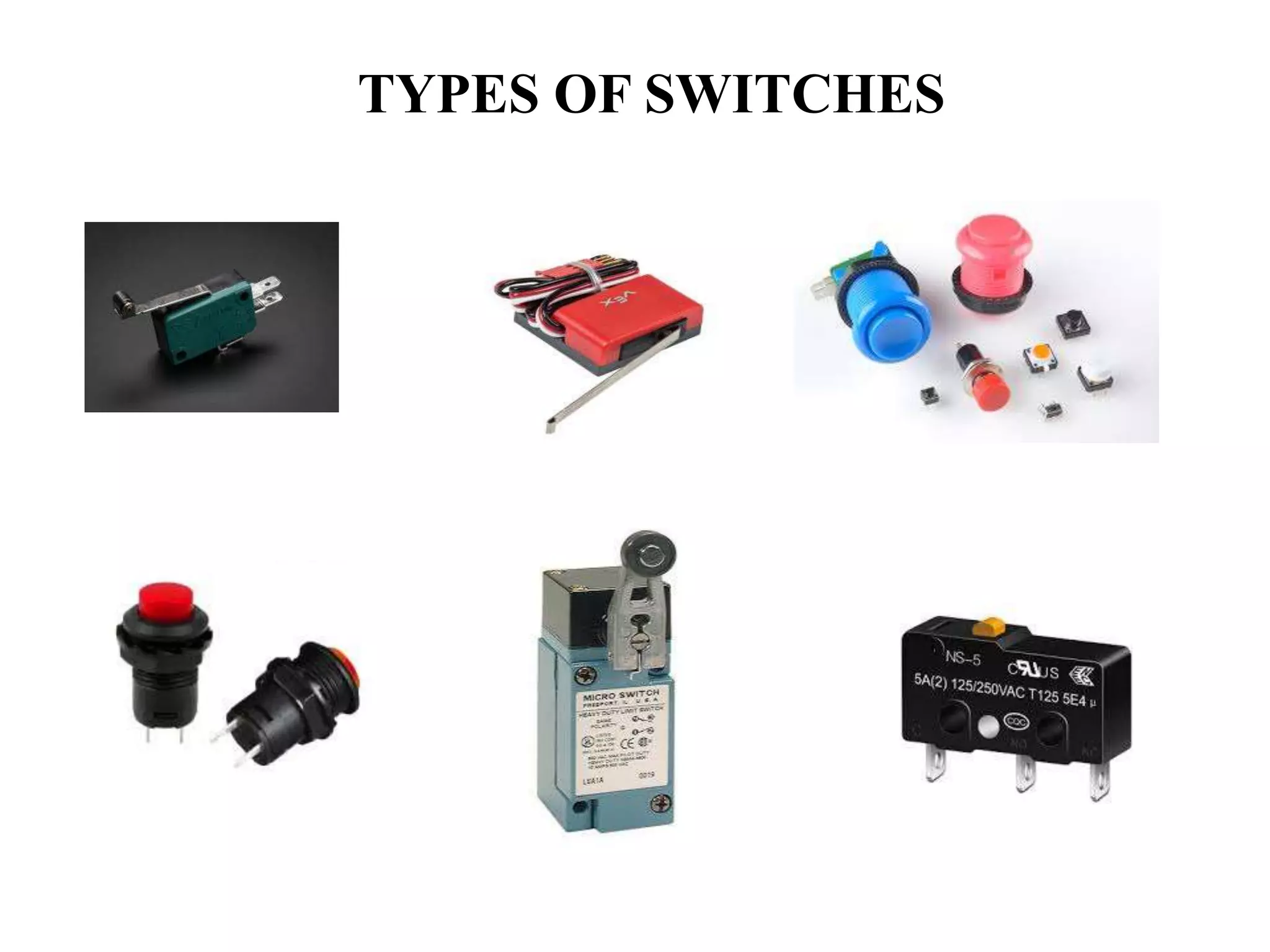
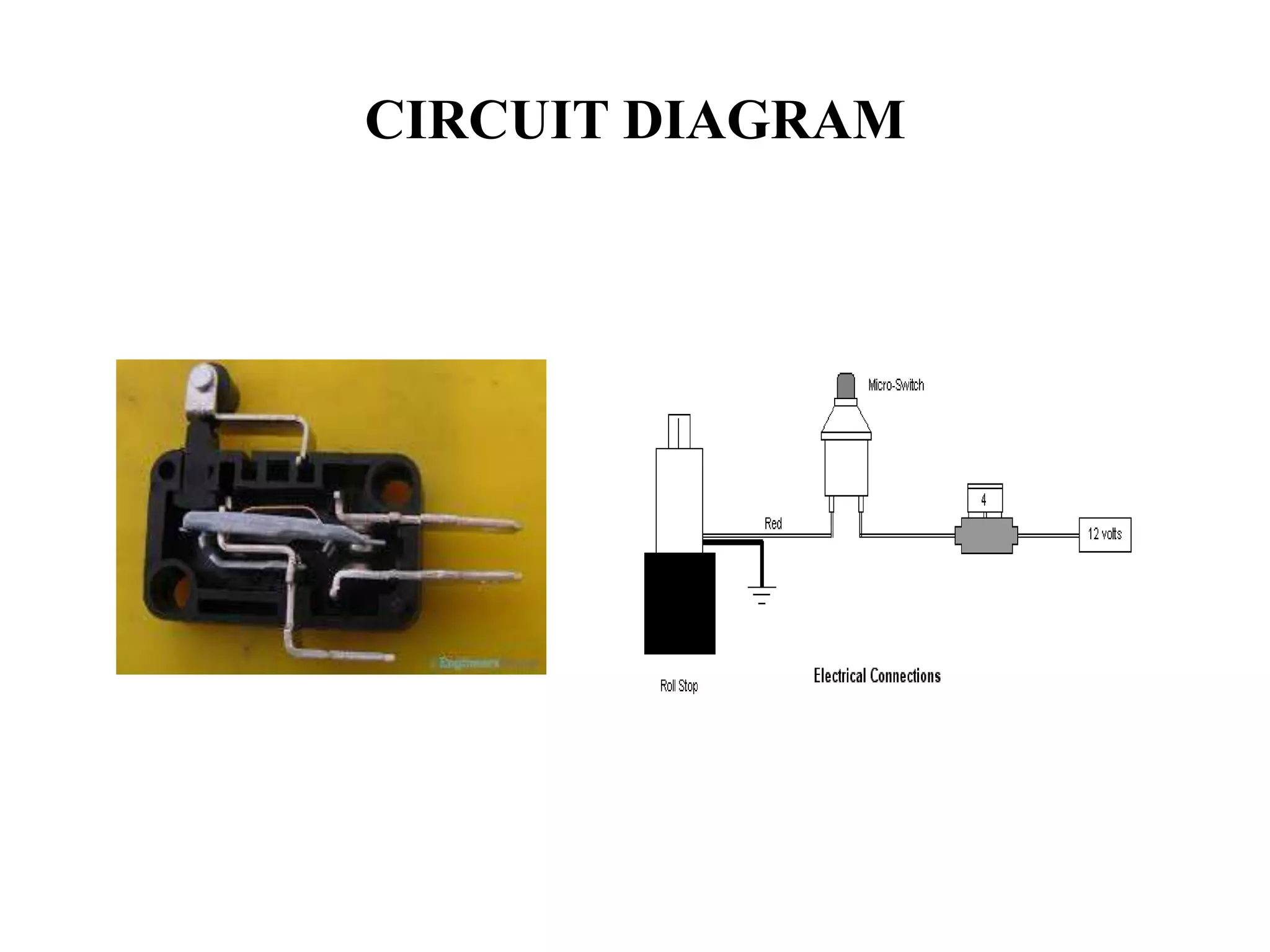
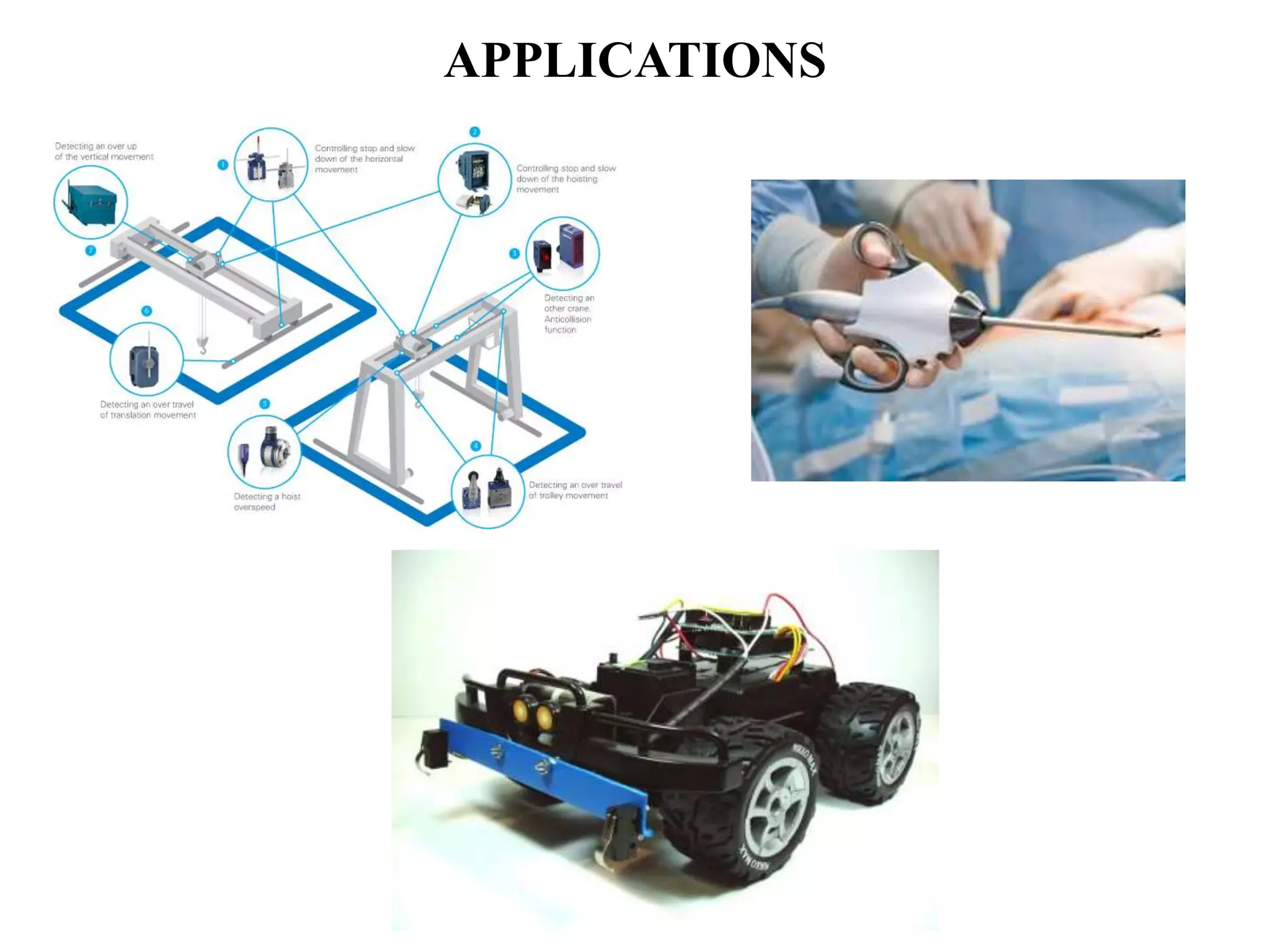
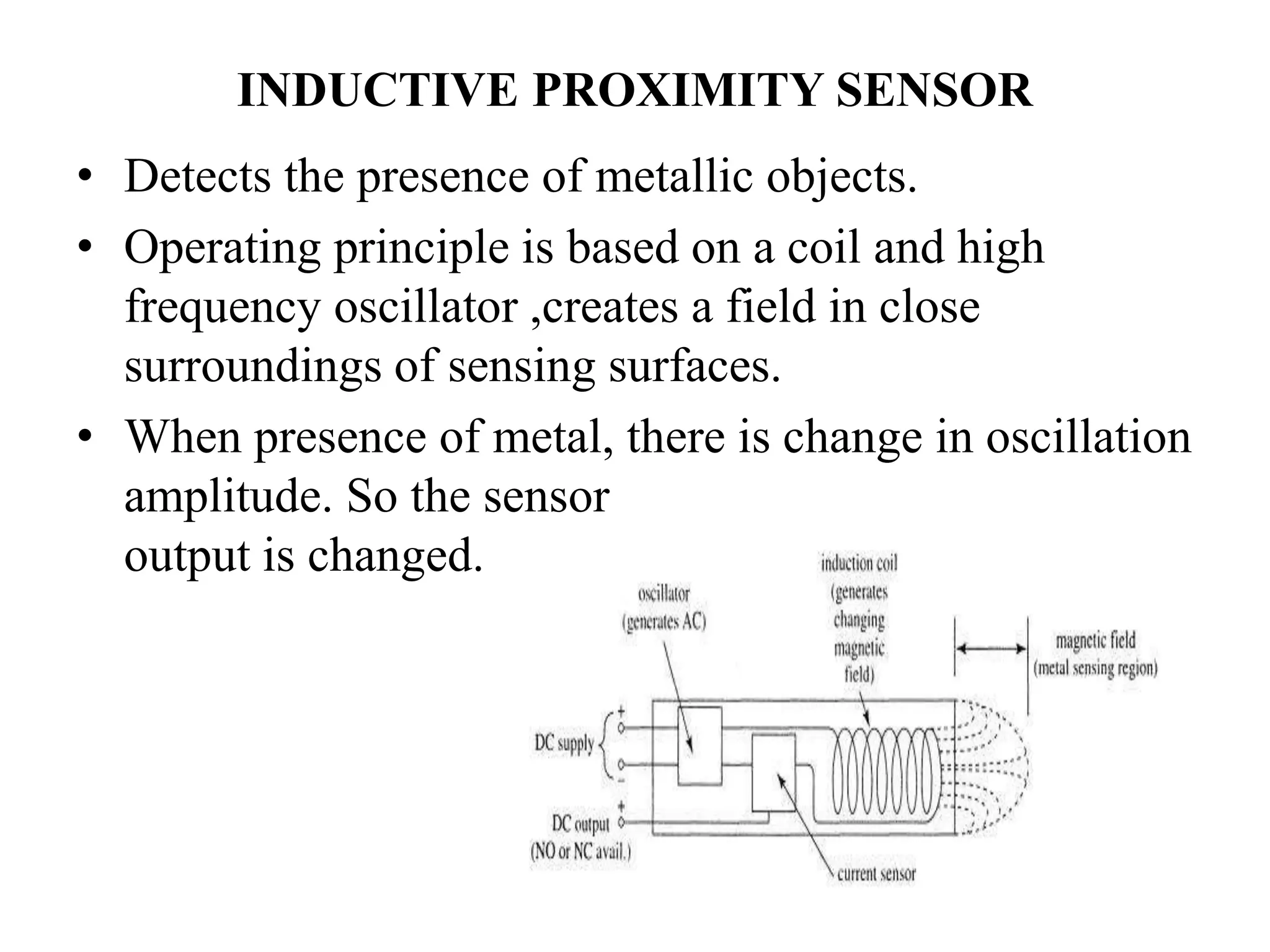
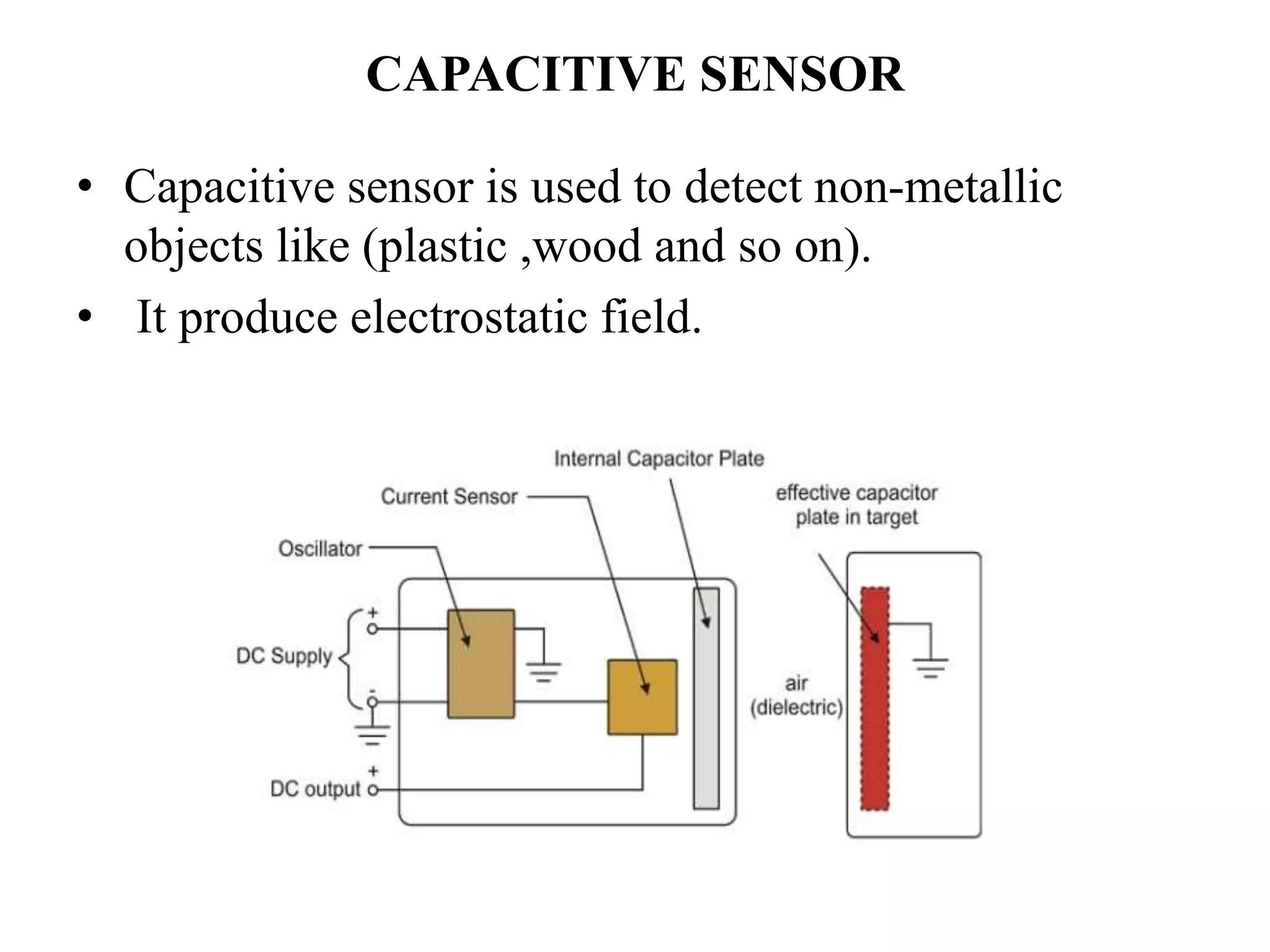
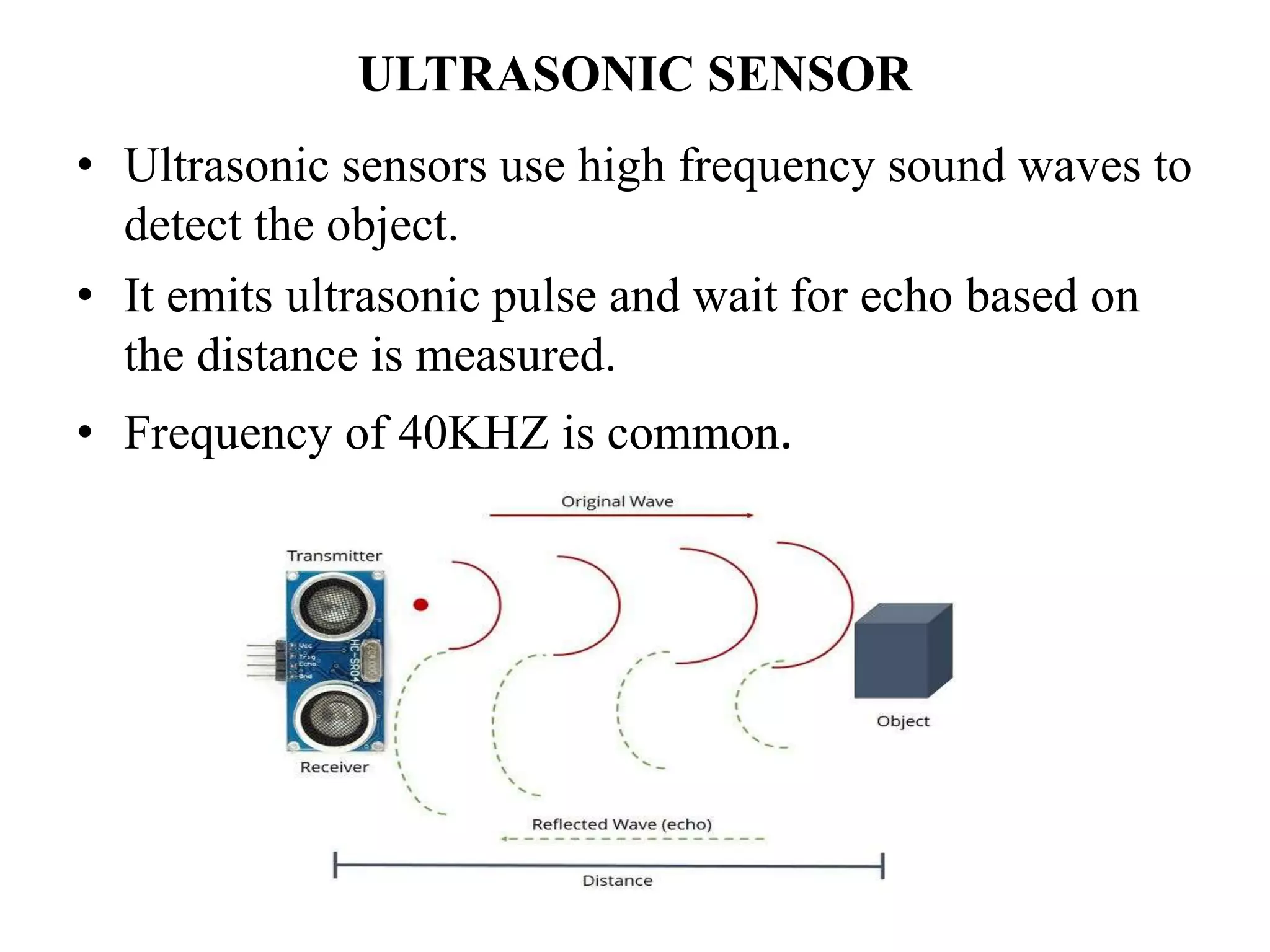
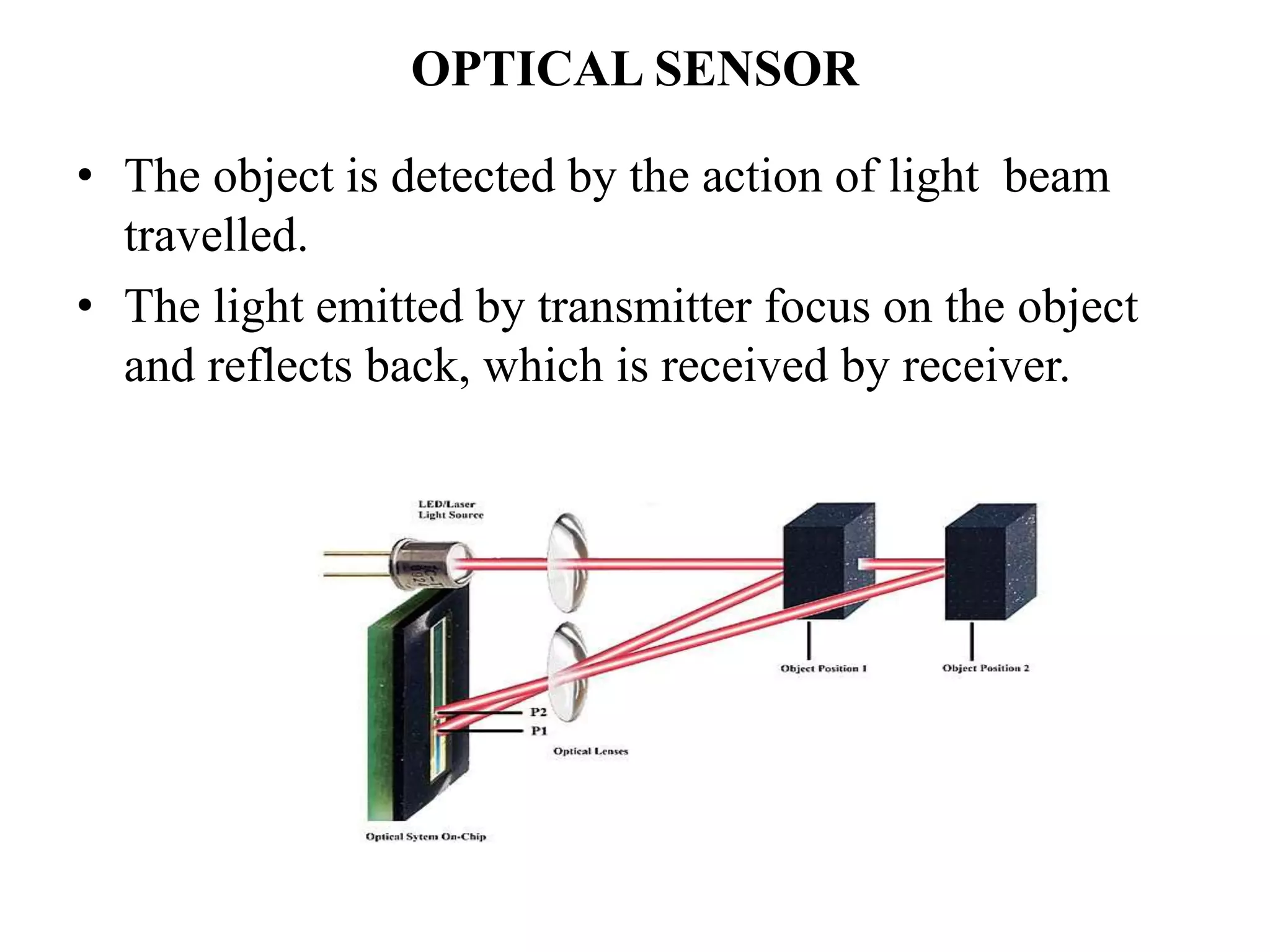
Micro switches and proximity sensors are electromechanical devices used for industrial applications like robotics. Micro switches, also called limit switches, use mechanical actuation to determine the presence, absence, position or movement of an object. Proximity sensors non-contactly detect nearby objects using different sensing methods like inductive, capacitive, ultrasonic or optical techniques without physical contact. Common applications of these sensors include timing devices, cranes, medical equipment and toy robots.