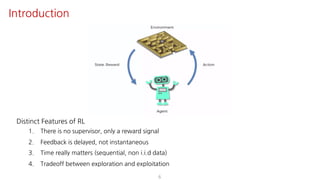
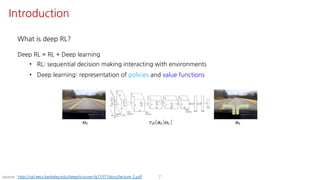
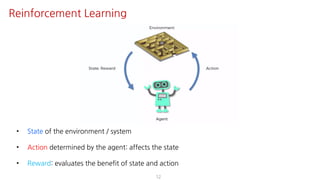
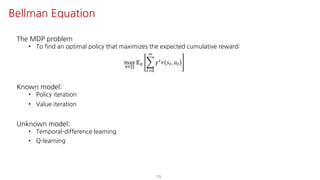
The document presents an overview of maximum entropy reinforcement learning, exploring key concepts such as Markov decision processes, the Bellman equation, and various exploration methods. It highlights the importance of adapting to uncertainty in environments while employing deep learning techniques for policy optimization. The Soft Actor-Critic algorithm is discussed in detail, emphasizing its applications and benefits in reinforcement learning scenarios.





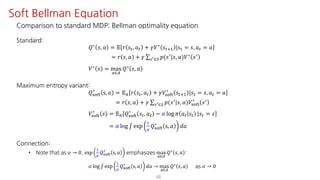
![A Markov decision process (MDP) is a tuple < 𝑆, 𝐴, 𝑝, 𝑟, 𝛾 >, consisting of
• 𝑆: set of states (state space)
e.g., 𝑆 = 1, … , 𝑛 (discrete), 𝑆 = ℝ:
(continuous)
• 𝐴: set of actions (action space)
e.g., 𝐴 = 1, … , 𝑚 (discrete), 𝐴 = ℝ<
(continuous)
• 𝑝: state transition probability
𝑝 𝑠= 𝑠, 𝑎 ≜ Prob 𝑠"?@ = 𝑠= 𝑠" = 𝑠, 𝑎" = 𝑎 d
• 𝑟: reward function
𝑟 𝑠", 𝑎" = 𝑟"d
• 𝛾 ∈ (0,1]: discount factor
14
Markov Decision Processes (MDPs)](https://image.slidesharecdn.com/maximumentropyrl-190824142117/85/Maximum-Entropy-Reinforcement-Learning-Stochastic-Control-14-320.jpg)

























![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Reinforcement Learning with Deep Energy-Based Policies](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks20170406-170407002545-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Meta Reinforcement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/metarl-190201005548-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Explainable Reinforcement Learning: A Survey](https://cdn.slidesharecdn.com/ss_thumbnails/dl20201218okada-201218023817-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Model-Based Reinforcement Learning via Meta-Policy Optimization](https://cdn.slidesharecdn.com/ss_thumbnails/model-basedreinforcementlearningviameta-policyoptimization-190705000247-thumbnail.jpg?width=640&height=640&fit=bounds)