Downloaded 45 times




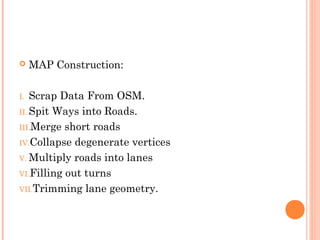


This document summarizes a student project on traffic simulation. It introduces the goals of developing a reasonably realistic traffic simulator using real city maps that allows real-time interaction on inexpensive machines and is easily extended. It reviews related work on simulators like SUMO, MATSim, and AIM. It describes how the project uses OpenStreetMap data to build maps and models each vehicle as an autonomous agent. The traffic simulation modeling approach and concepts like determinism and intersection bidding are also summarized. Future work ideas are outlined like improving traffic light logic and adding vehicle diversity.