Downloaded 24 times
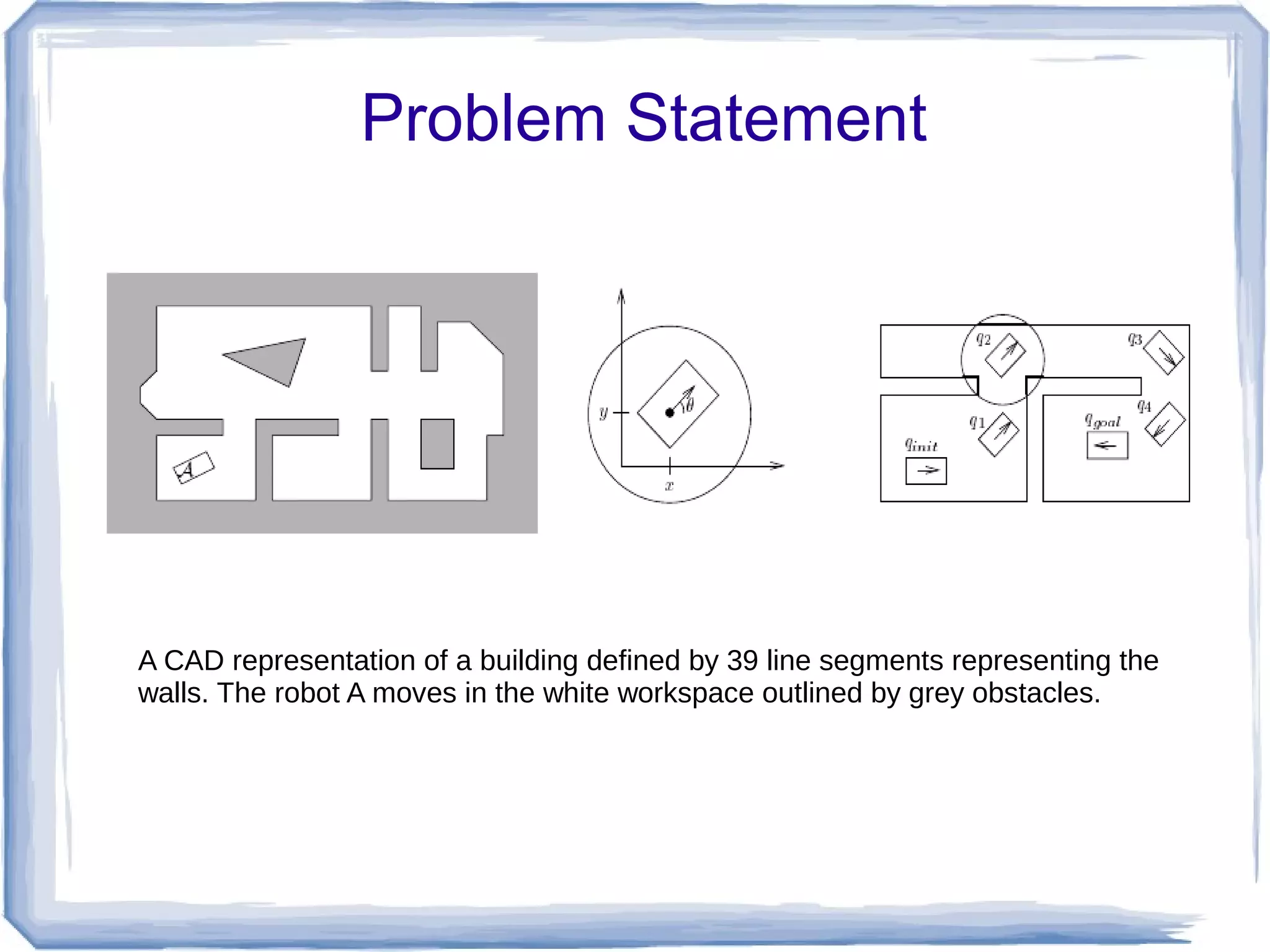
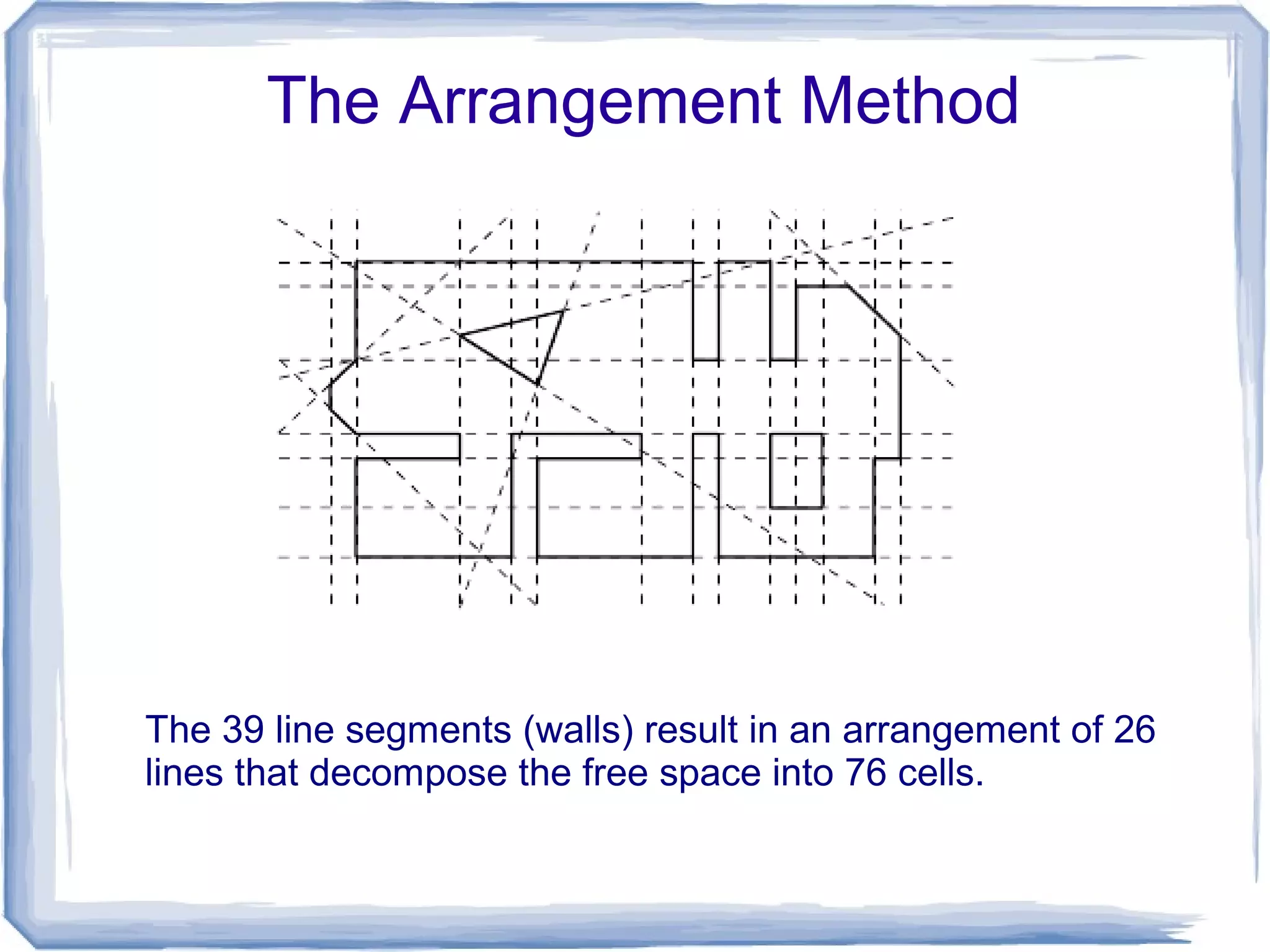
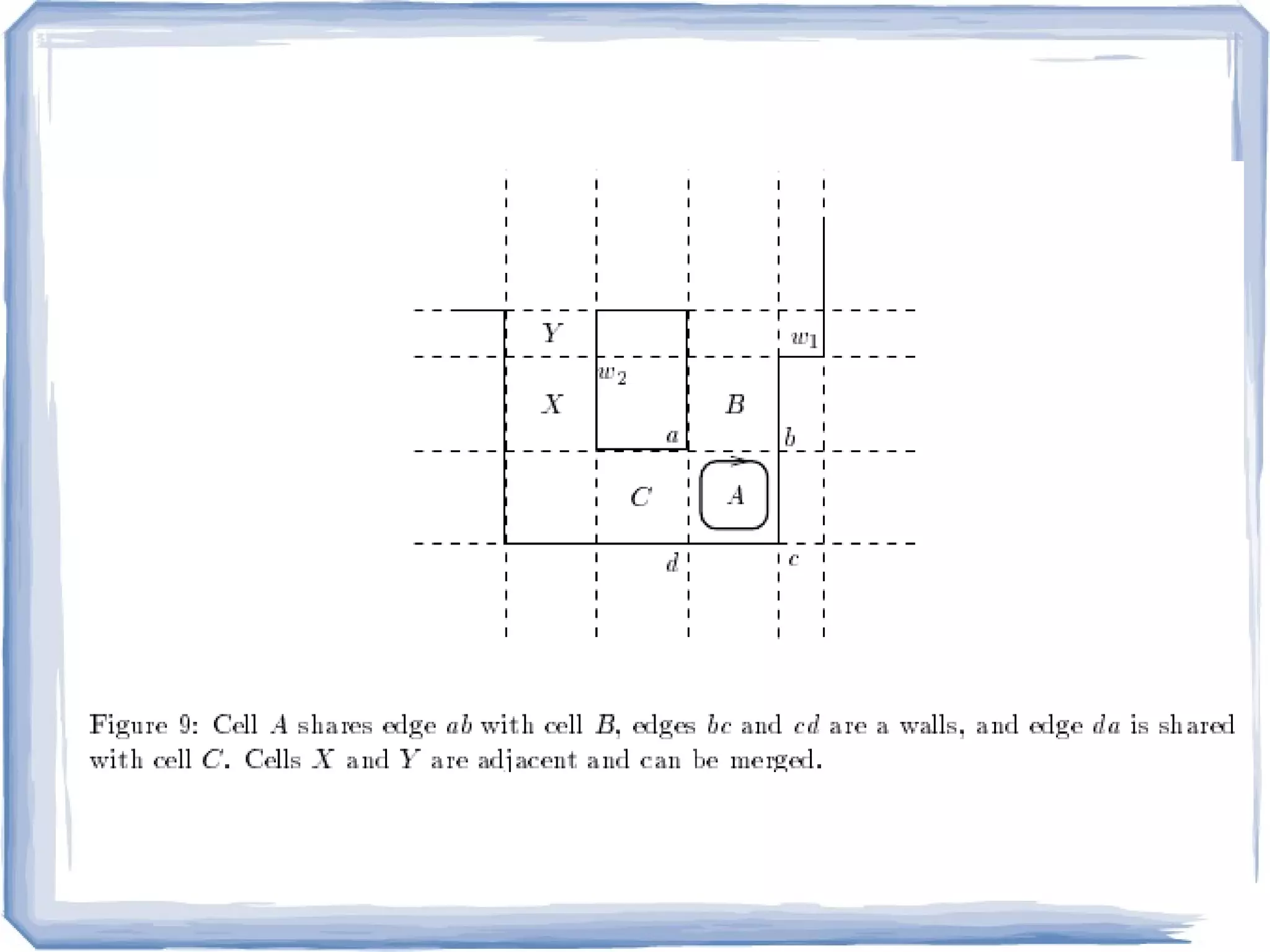
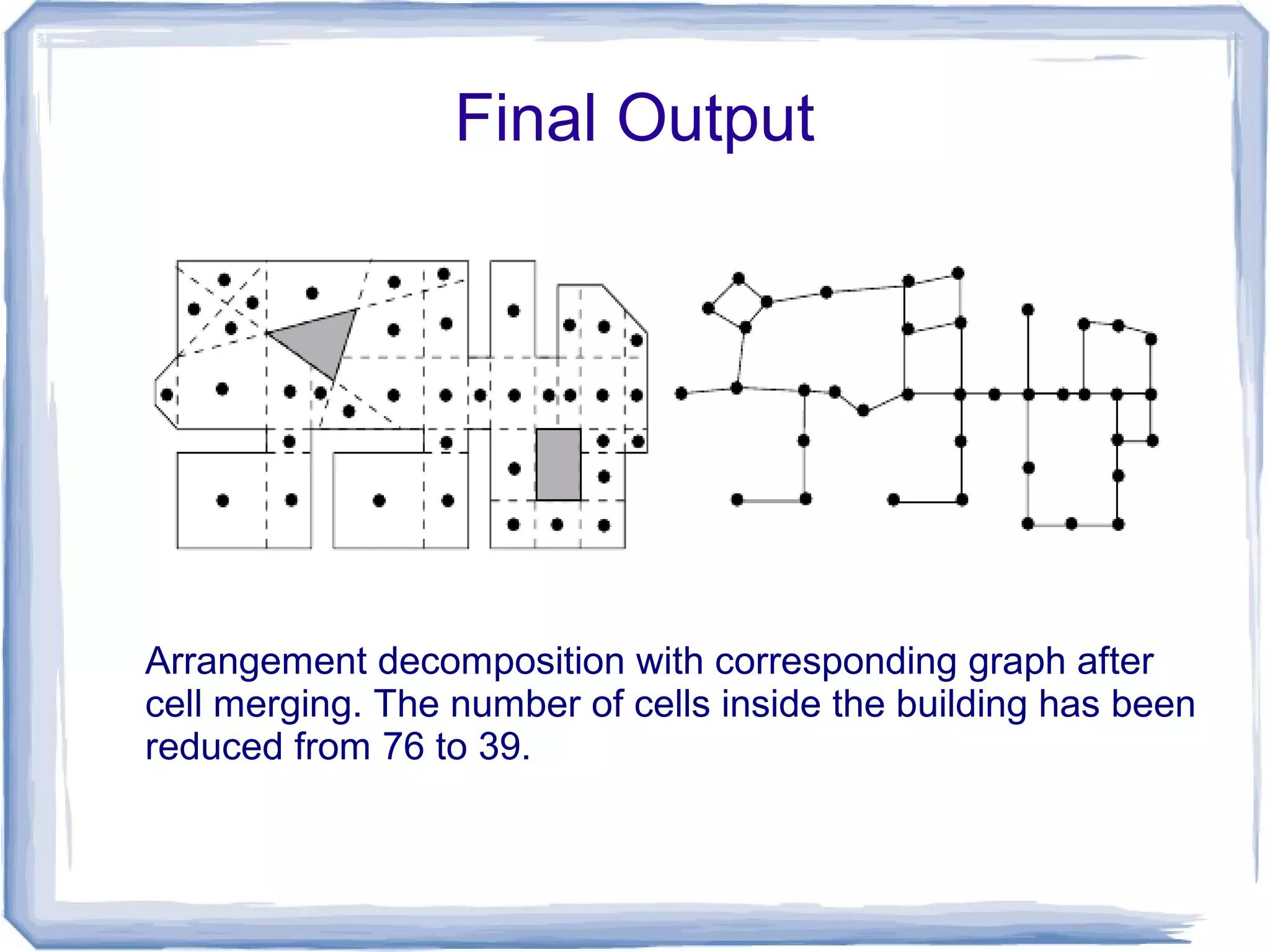
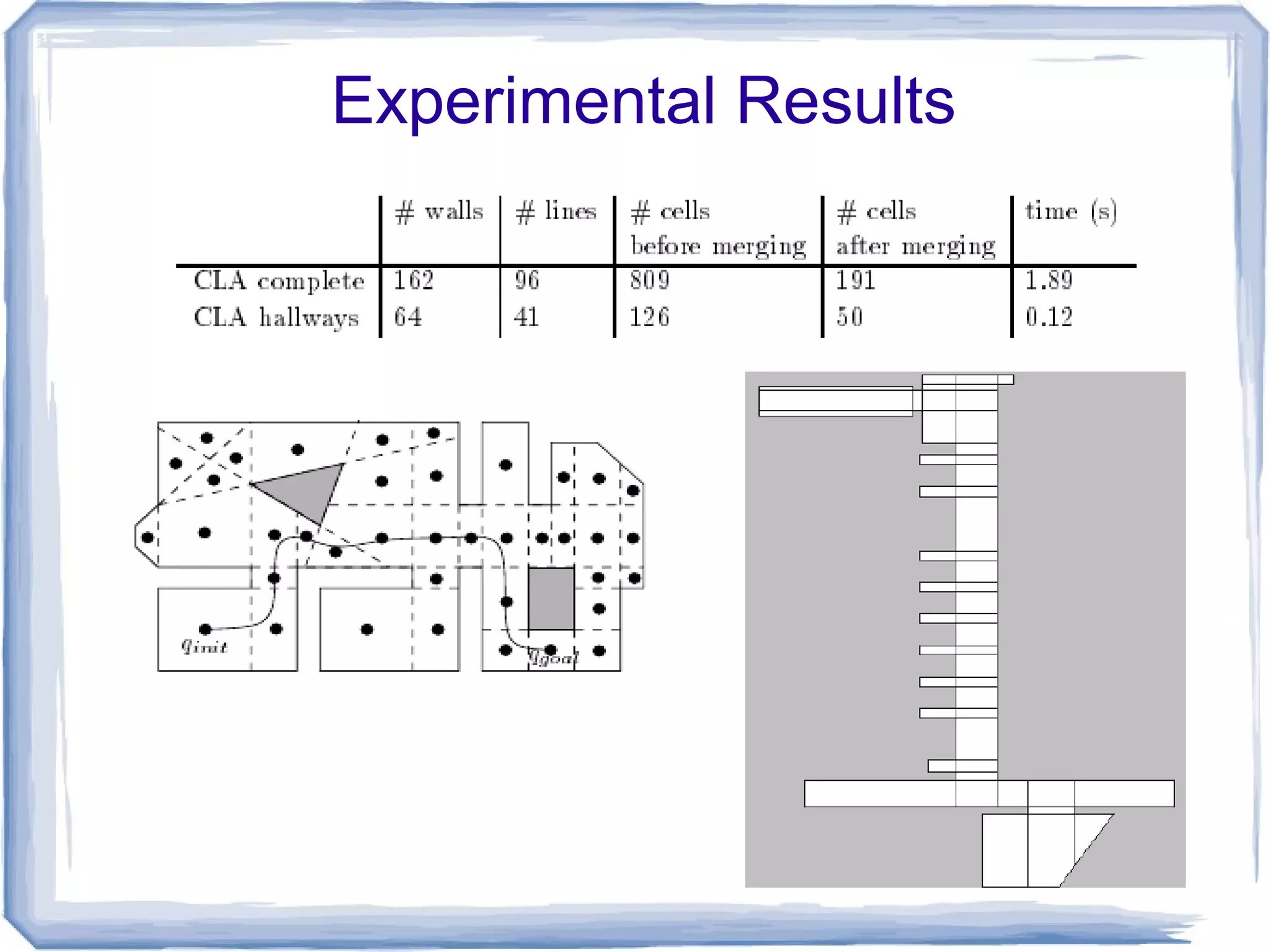

The document presents an algorithm for generating a map of an indoor environment for mobile service robots, using a CAD description of a building's walls. It employs an exact cell decomposition method that transforms wall segments into infinite lines, resulting in a connectivity graph for path planning and position verification. The algorithm successfully reduces the number of cells from 76 to 39 while providing environmental information for each cell.