Downloaded 20 times
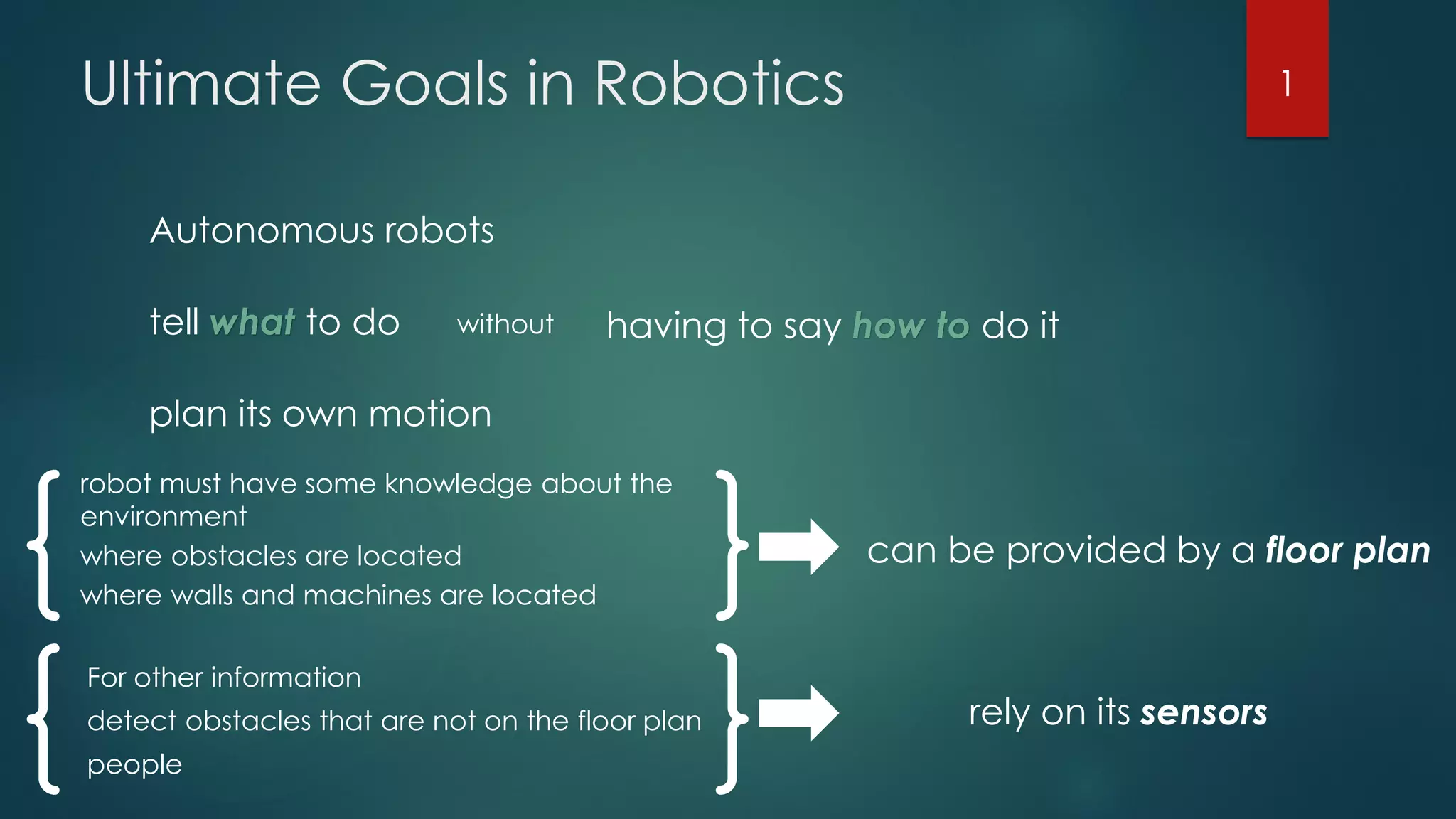
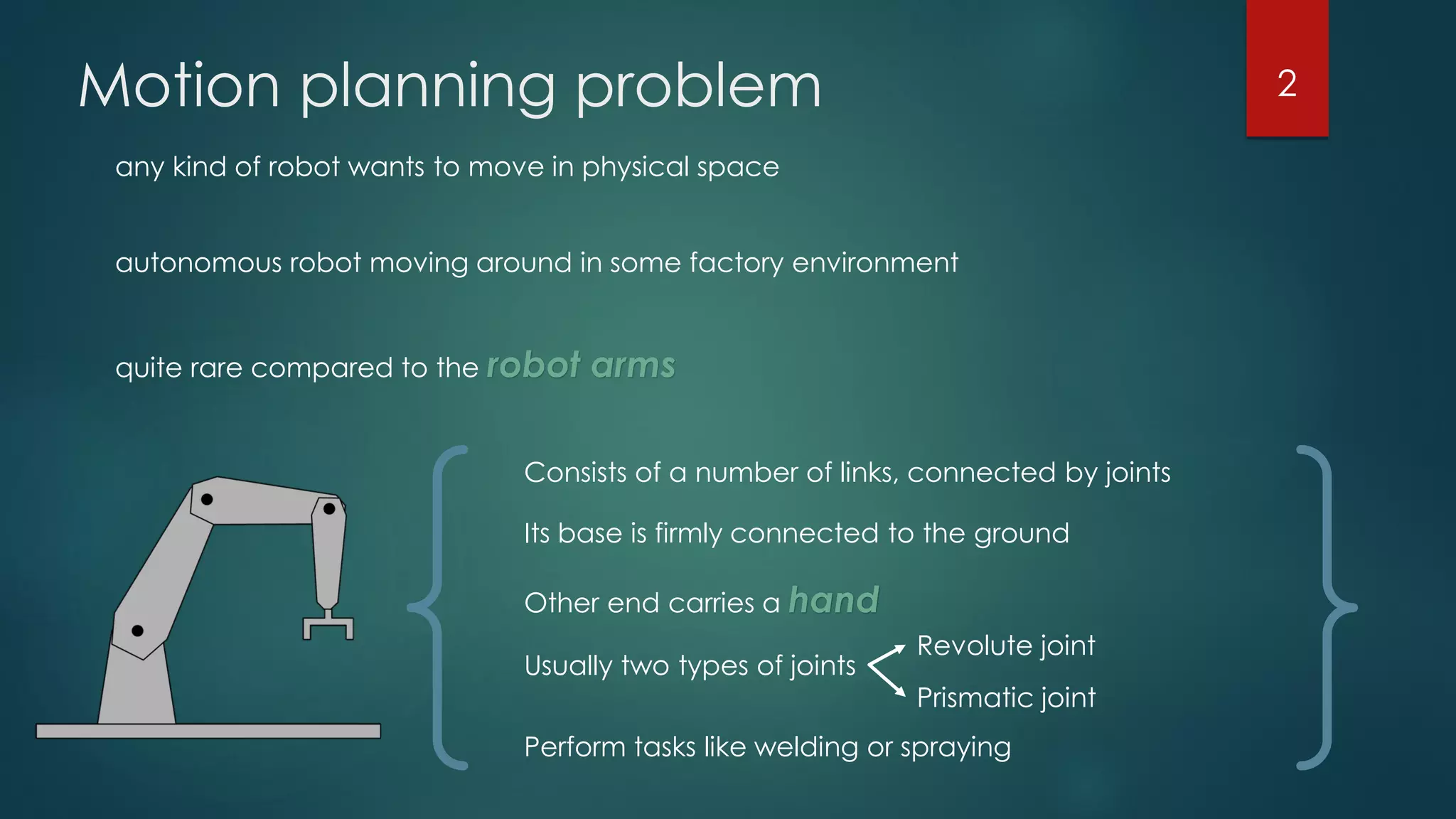
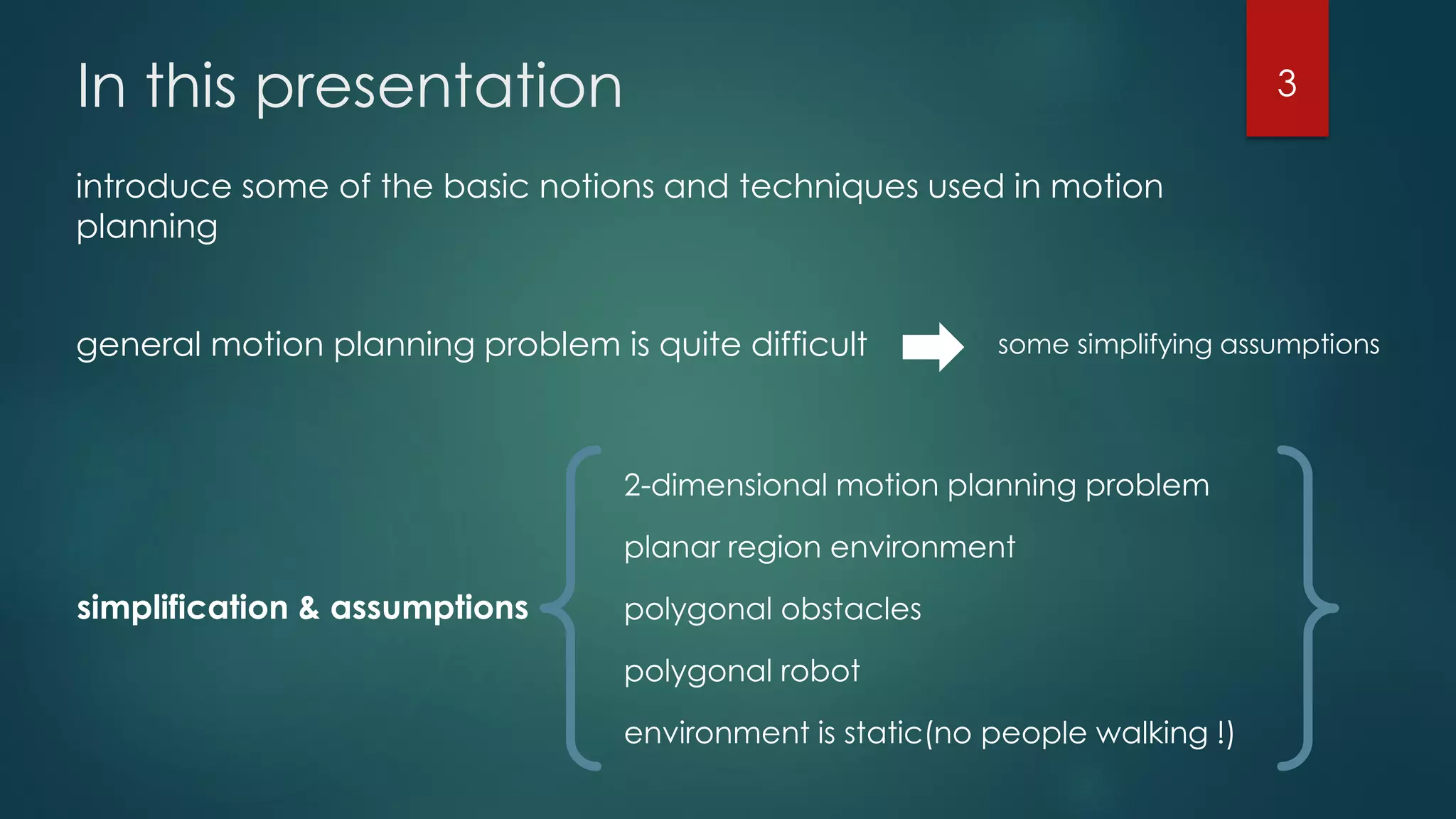
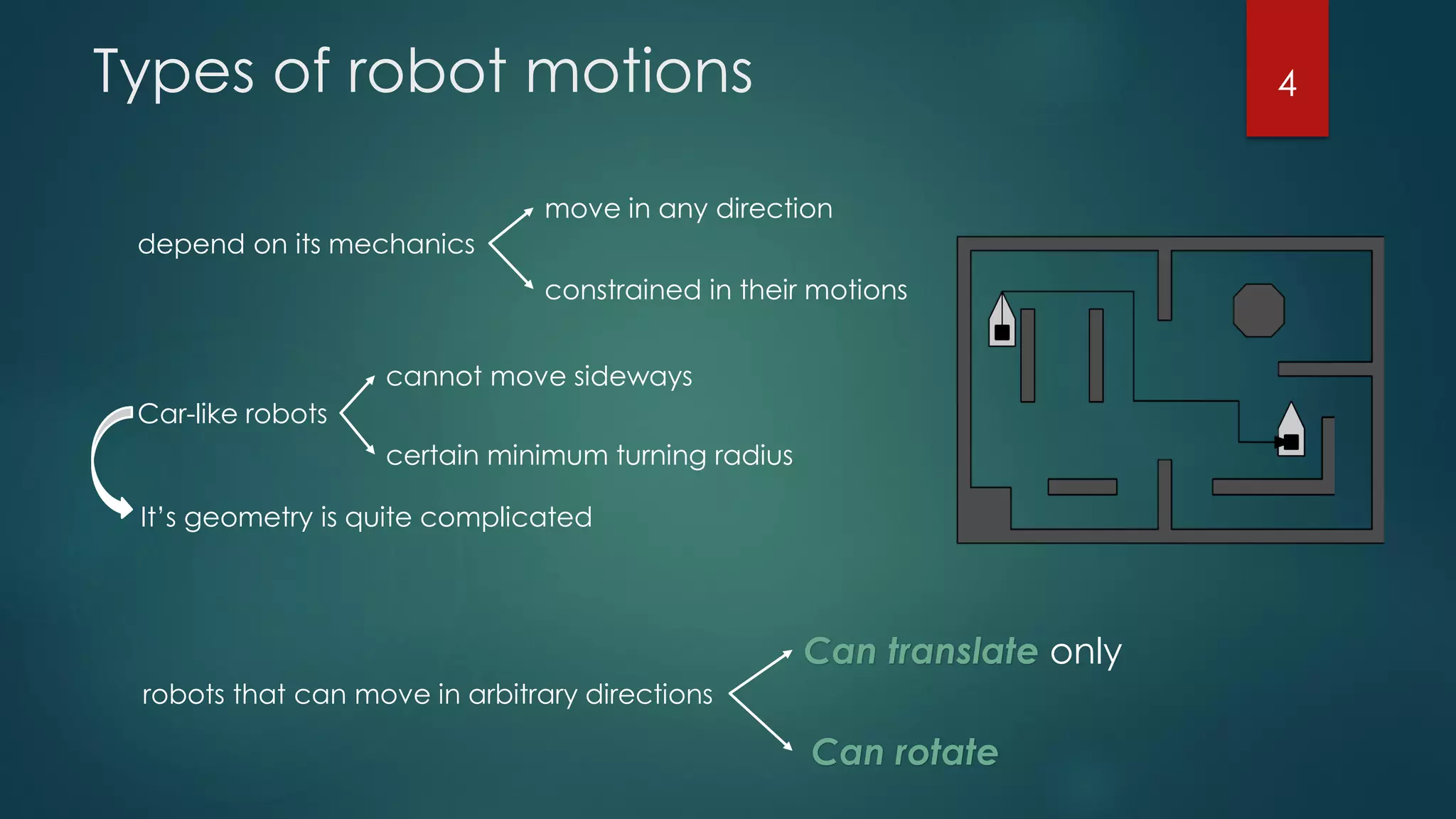
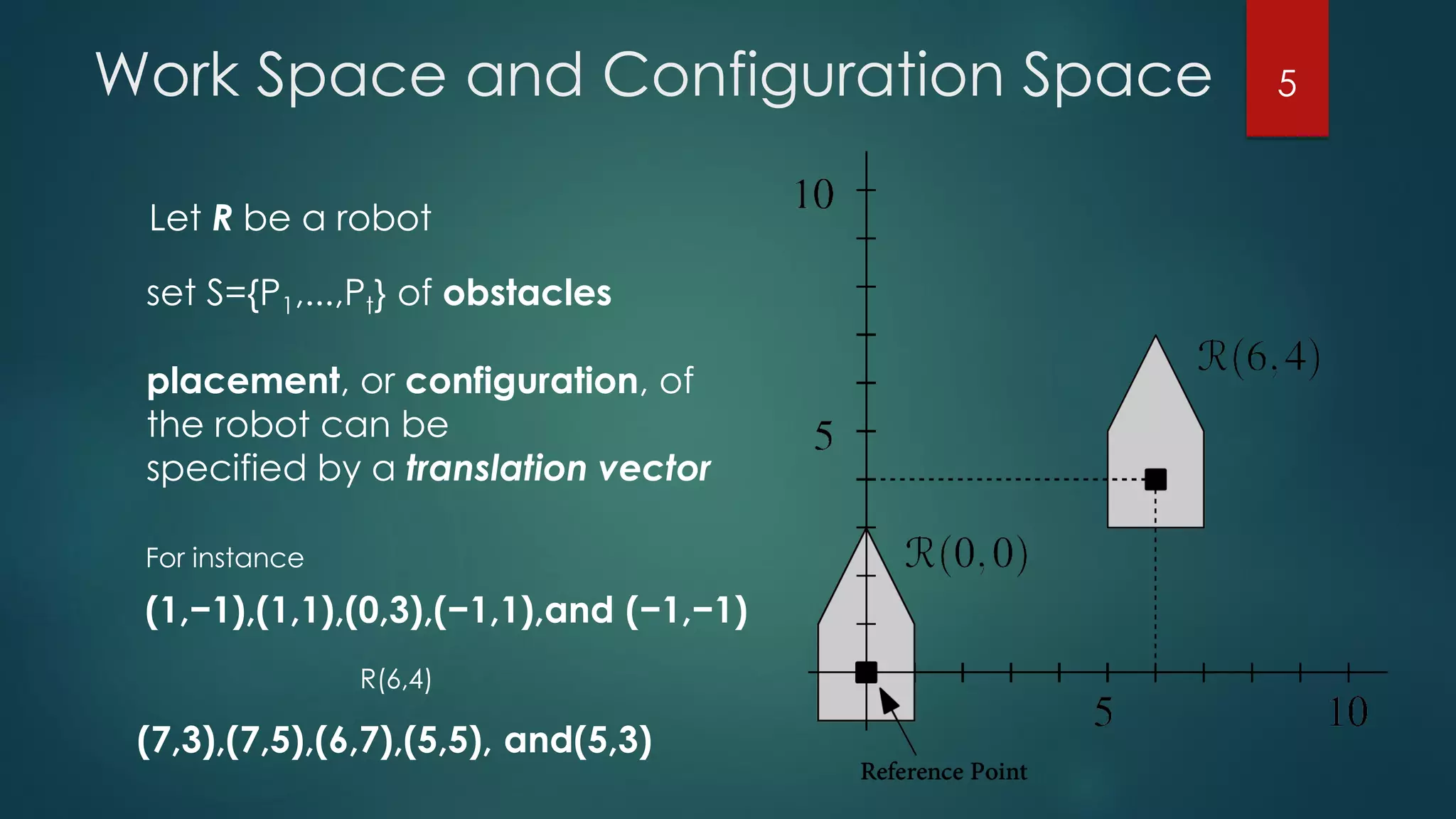
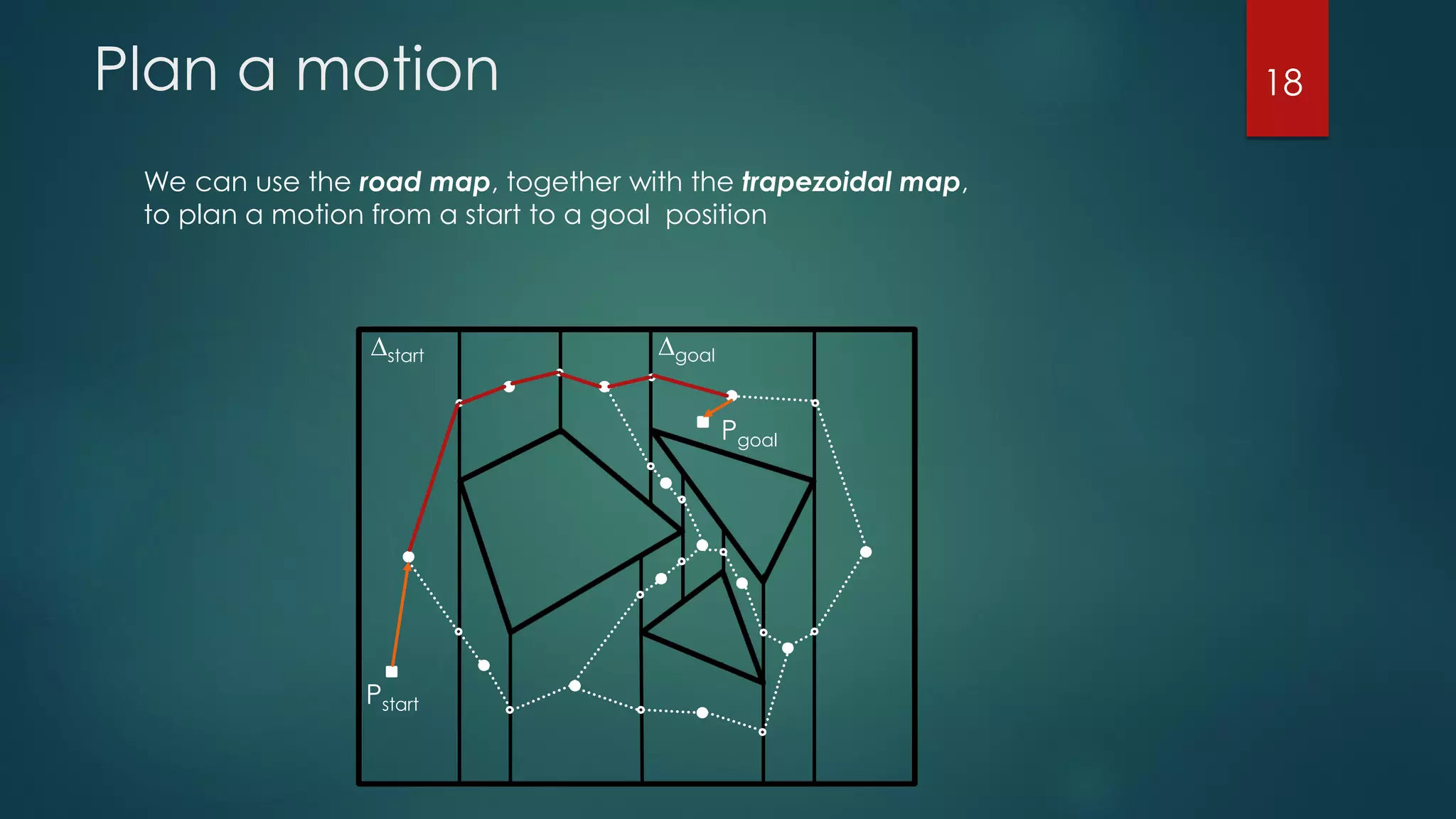
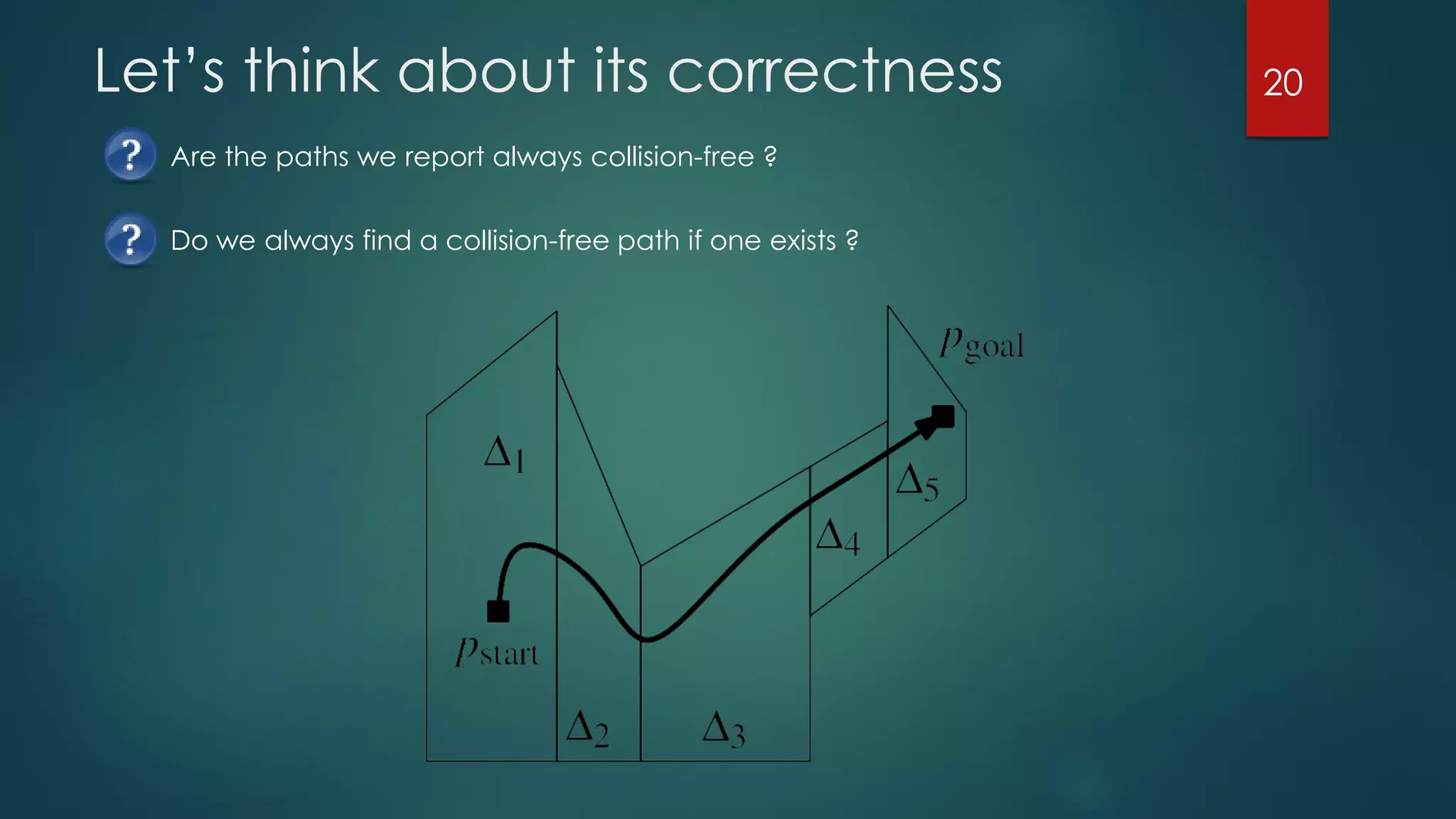
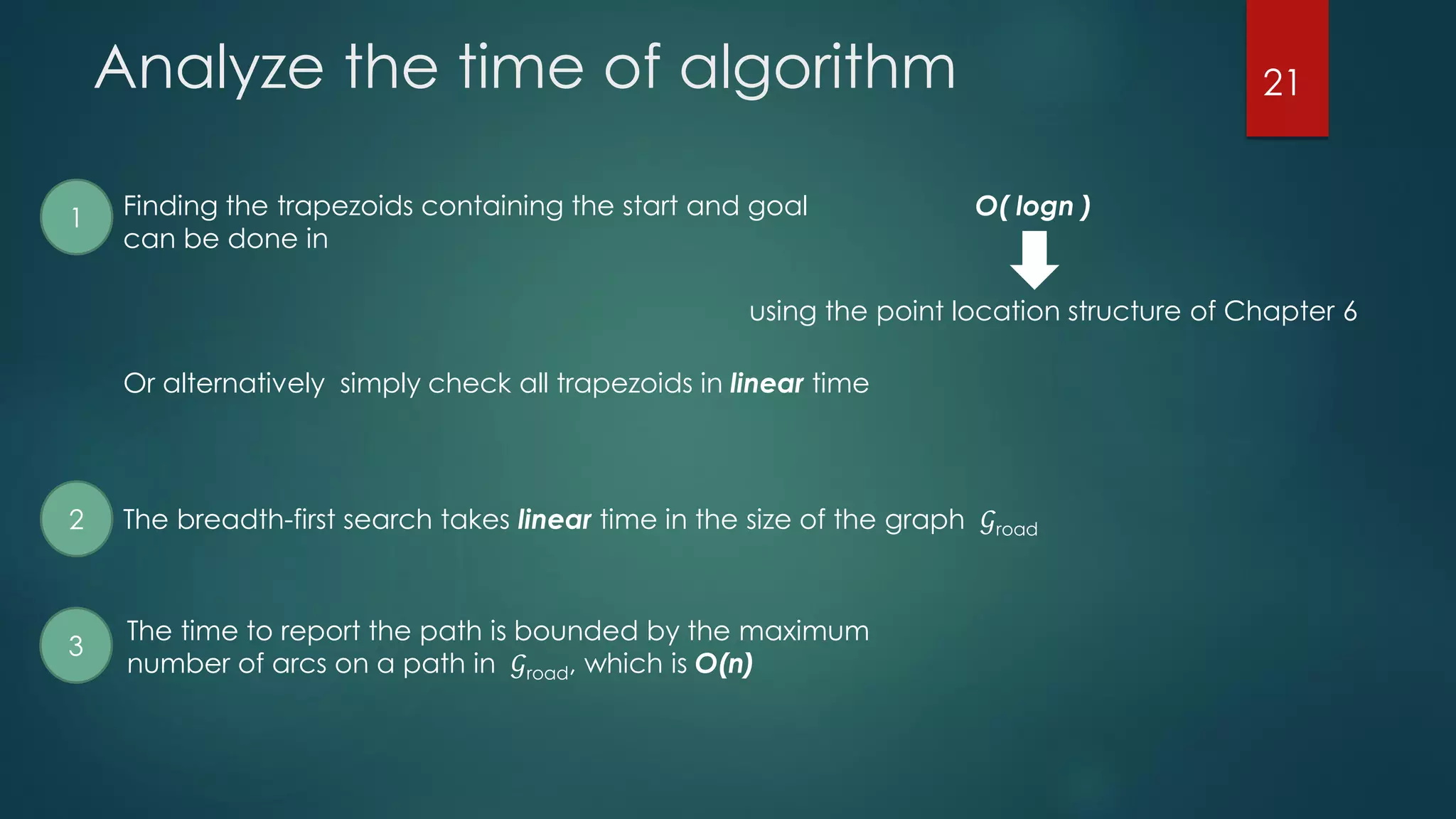


The document discusses robot motion planning, focusing on the fundamental concepts and techniques required for an autonomous robot to navigate its environment while avoiding obstacles. It outlines the configuration and workspace of robots, the challenges in motion planning, and the use of trapezoidal maps and road maps to find collision-free paths. Techniques such as Minkowski sums are also introduced to facilitate the planning of motion for robots with complex shapes.