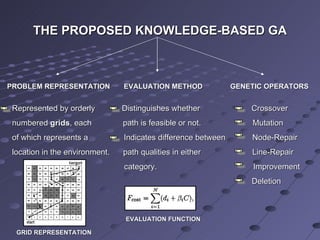
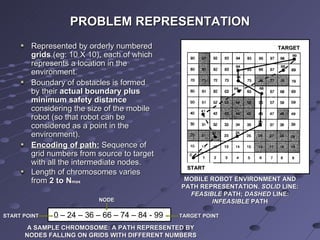

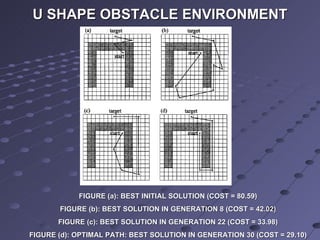
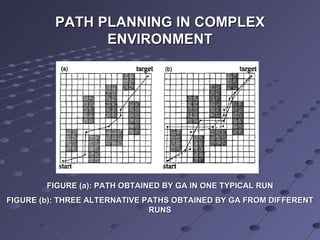
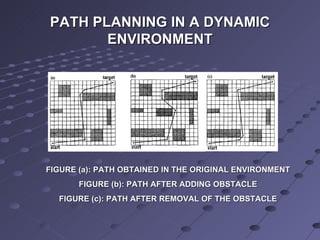
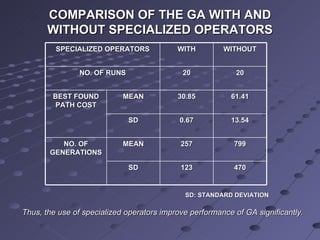


This document summarizes a research paper that proposes a knowledge-based genetic algorithm for mobile robot path planning. The algorithm uses a grid-based representation and specialized genetic operators informed by domain knowledge. Simulation results show the algorithm can find optimal or near-optimal paths in static and dynamic environments. Comparisons demonstrate the specialized operators improve GA performance over standard operators. Future work could better utilize domain knowledge and handle changes in dynamic environments.