Download as PDF, PPTX

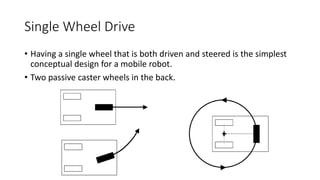
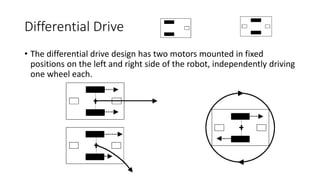

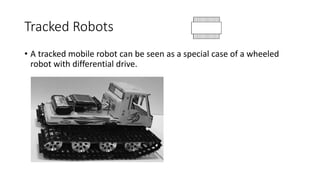
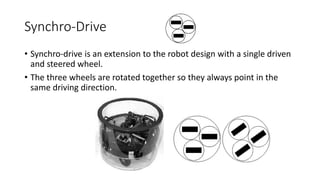
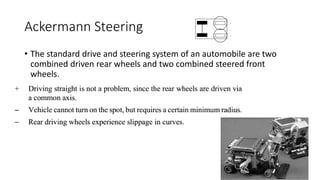
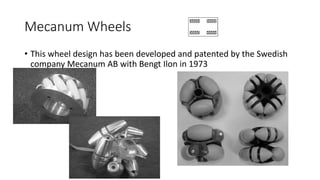
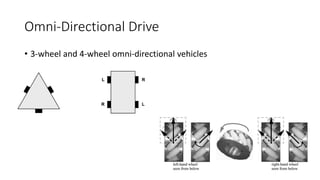


The document discusses various designs for mobile robots, including single wheel drive, differential drive, tracked robots, and omni-directional robots. It highlights the differences between holonomic and non-holonomic movement capabilities, particularly focusing on the mecanum wheel design for omni-directional mobility. Additionally, it briefly mentions the steering mechanisms used in these designs, such as Ackermann steering.