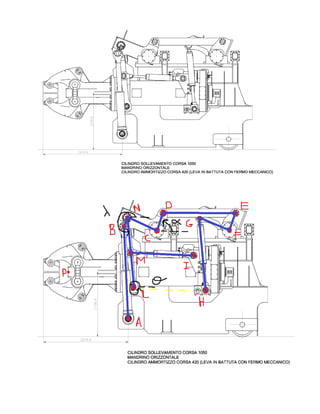
This document summarizes a mechanical engineering student project analyzing the kinematics and dynamics of a forging manipulator. It includes:
1) Modeling the hydraulic actuators as spring-damper systems and computing kinematics using vector equations of the degrees of freedom.
2) Computing static preloads on the actuators to achieve equilibrium.
3) Linearizing the equations of motion around the equilibrium position to determine natural frequencies and mode shapes.
4) Calculating frequency response functions by solving the linearized equations with an external forcing function.










![solution of the system easier. So we will linearize the 4 contributions (potential
energy, dissipative function, kinetic energy and Q) of the Lagrange equations.
Linearization of potential energy V
For a one degree of freedom system the approach is the following one: we perform
the Taylor expansion of around the equilibrium position ( q=q0) , finding its first
order term which is the equivalent stiffness of the linearized system in small
displacements; this procedure returns two contributions:
Elastic contribution :
Gravitational contribution :
The total equivalent stiffness is simply the sum of these 2 quantities.
For a multidegree of freedom system, as in our case, the procedure is the same; the
only difference is that we have matrices instead of scalar values.
V= zT
[K] z;
The equivalent stiffness matrix becomes:](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-15-320.jpg)
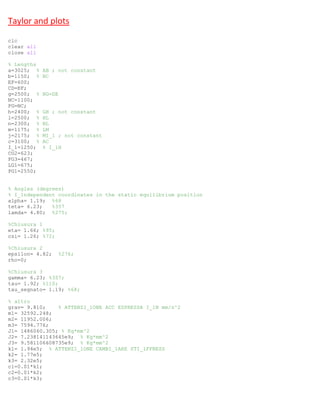
![Where:
i=1,2,3 (there are 3 actuators);
ki is the stiffness of each actuator;
mi is the mass of each body;
KF is a diagonal matrix containing the 3 actuator stiffnesses ;
Yk is a vector containing the 3 elongations 1, 2, 3;
Jk is the stiffness jacobian;
H is the hessian matrix;
0 is the static preload of the actuators.
Jk θ λ α
1 0 0 1134.3
2 -1162.3 1162.3 0
3 -2477.4 -14.3 0
HΔl1 = [ ]
H Δl2 = [ ]
H Δl3 = [ ]
Hhg1 = 1.0e+03 * [ ]](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-16-320.jpg)
![Hhg2 = [ ]
Hhg3 = [ ]
K_el_I = 1.0e+12 * [ ] N/m
K_el_II = 1.0e+09 * [ ] N/m
K_g = 1.0e+08 * [ ] N/m
[K]=[ K_el_I] + [K_el_II] + [K_g] =1.0e+12*[ ] N/m
Linearization of dissipative function D
The dissipative function for a multidegree of freedom system is: D = ̇k
T
[RF] ̇k ,
where:
̇k is a vector containing the elongation velocities of the 3 actuators;
[RF] is a diagonal matrix containing the damping coefficients of the 3
actuators.](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-17-320.jpg)
![Since ̇k = [Jk] zT
(Jk is the stiffness jacobian), D becomes:
D = ̇T
[R] ̇ with [R] = [Jk]T
[RF] [Jk];
[R]= 1.0e+10 * [ ] (N*s)/m
Linearization of kinetic energy T
In order to perform the linearization of the kinetic energy, we have linearized the
kinematic relationships getting the following results:
V1x - ̇ LG1 cos(6.81-θo) - ̇ NC cos(αo) - ̇ n sin(λo)
V1y ̇ LG1 sin(6.81-θo) - ̇ NC sin(αo) + ̇ n cos(λo)
ω1 ̇
V2 CG2 α̇
ω2 ̇
V3 FG3 α̇
θo, αo and λo are the values of the independent coordinates θ, λ, α at the
equilibrium position.
(V1)2
= (V1x)2
+ (V1y)2
We have projected the velocity V1 on x and y direction to get an easier matrix
representation in the mass jacobian.](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-18-320.jpg)
![Mass jacobian
JM ̇ ̇ ̇
V1x -564.6 -408.8 2291.2
V1y 369.9 -1021.2 201.2
ω1 0 0 623.0
V2 0 0 467.0
ω2 1 0 0
V3 0 0 1
ω3 0 0 1
The kinetic energy for a multidegree of freedom system is: T= ̇M
T
[MF] ̇M
where:
̇M is a vector containing all the velocities of the bodies in physical
coordinates;
[MF] is a diagonal matrix containing masses and inertia properties of the 3
bodies; since we have considered V1x and V1y, MF becomes diag ( m1, m1, J1,
m2, J2, m3, J3 );
Since ̇M = [JM] ̇, T becomes: T = ̇T
[M] ̇ with [M] = [JM]T
[MF] [JM]; [M] is the
mass matrix.
[M] = 1.0e+11 [ ] kg](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-19-320.jpg)

![not present in our external force, even the second term is null. So the only term that
remains is the first one.
For a multidegree of freedom system the previous considerations are still valid; the
difference is that:
*
L = F
T
F = zT
( [JM] T
F ) = zT
QF
where:
F {
s
s } F = { } z = {
θ
λ
α
}
[JM] is the force jacobian:
JM θ λ α
sx -335.1 2291.2 -408.8
sy -2169.3 -201.2 -1021.2
Natural frequencies and mode shapes
Once we have linearized T, D, V and Q, we apply the Lagrange method and we
obtain three linearized equations of motion.
[M] ̈ + [R] ̇ + [K] z = Q
These equations are coupled; this means that
from the mathematical point of view, we can not start solving one equation
independently from the other;
from the physical point of view, the motion of a certain mass will influence the
motion of the other ones.
Now we can solve the system and find the solution. The first step is to calculate the
natural frequencies. To do this, we will consider the unforced and undamped system:
[M] ̈ + [K] z = 0](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-21-320.jpg)
![Its solution will be: z = z0 eiωt
z0 = {
̃
̃
̃
}
Deriving z with respect to time, we obtain: ̇ = iωz0 eiωt
; ̈ = -ω2
z0 eiωt
Substituting these terms inside the system:
( -ω2
[M] + [K] ) z0 eiωt
= 0
since this expression must be satisfied for all values of time t
( -ω2
[M] + [K] ) z0 = 0
This is an algebraic system in which the unknown is z0. If the determinant of the
coefficients matrix is different from zero, there will be only one solution, that will be
the trivial one since this system is also homogenous.
Trivial solution means {
̃
̃
̃
} = { } no vibration !!!
In order to avoid this situation, we must impose that the determinant of the
coefficients matrix is equal to zero and so we obtain an equation called “frequencies
or characteristic equation” in which the unknown is ω.
̃, ̃, ̃ are the
amplitudes of the θ, λ, α
respectively](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-22-320.jpg)
![Solving this equation, we obtain the natural frequencies of our system:
ω1 = 27.3928 rad/s ω2 = 2.7260 rad/s ω3 = 1.0936 rad/s
We could have used another procedure in order to get the natural frequencies:
( -ω2
[M] + [K] ) z0 = 0
-ω2
[I] + [M]-1
[K]
[A]
So we obtain: ω2
[I] z0 = [A] z0
[φ] = [ ]
Observation: z = [φ] q
This is an eigenvalue problem in which:
ω are the eigenvalues;
the eigenvectors are collected in a
matrix called “φ” (mode shapes).
q is the vector containing
the modal coordinates](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-23-320.jpg)
![Frequency response function
We will start from the linearize equations of motion ( [M] ̈ + [R] ̇ + [K] z = Q ) and
we will suppose that the external force is F = F0 e iΩt
(approach with complex
numbers).
Q = Q0 e iΩt
z = z0 eiΩt
Deriving z with respect time, we obtain:
̇ =iΩz0eiΩt
; ̈ = -Ω2
z0 eiΩt
This is the
particular
solution](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-24-320.jpg)
![Substituting these terms inside the system:
( -Ω2
[M] + i Ω [R] + [K] ) z0 eiωt
= Q0 e iΩt
( -Ω2
[M] + i Ω [R] + [K] ) z0= Q0
[A]=[A(Ω)]
So: z0= [A]-1
Q0.
an amplitude
z0 is a complex number and hence it has
a phase
In the following pictures, we have considered Ω = [ 0 … 2*ω1].
Matrix of the
mechanical
impedence of the
system](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-25-320.jpg)










![Delta static
syms delta_1_static delta_2_static delta_3_static F0_ext
d_V_teta_0= LG1*grav*m1*cos(teta - 131/25) - k2*((l*sin(teta) + I_1*sin(teta -
431/100))*((m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100))^2/(m*cos(lamda) +
l*cos(teta) + I_1*cos(teta - 431/100))^2 + 1)^(1/2) - (((2*(l*sin(teta) + I_1*sin(teta
- 431/100))*(m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100))^2)/(m*cos(lamda) +
l*cos(teta) + I_1*cos(teta - 431/100))^3 + (2*(l*cos(teta) + I_1*cos(teta -
431/100))*(m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100)))/(m*cos(lamda) +
l*cos(teta) + I_1*cos(teta - 431/100))^2)*(m*cos(lamda) + l*cos(teta) + I_1*cos(teta -
431/100)))/(2*((m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100))^2/(m*cos(lamda) +
l*cos(teta) + I_1*cos(teta - 431/100))^2 + 1)^(1/2)))*(delta_2_static + ((m*sin(lamda)
+ l*sin(teta) + I_1*sin(teta - 431/100))^2/(m*cos(lamda) + l*cos(teta) + I_1*cos(teta -
431/100))^2 + 1)^(1/2)*(m*cos(lamda) + l*cos(teta) + I_1*cos(teta - 431/100)) - 2175) -
k3*(l*sin(teta)*((n*sin(lamda) + l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 +
1)^(1/2) - (((2*l*cos(teta)*(n*sin(lamda) + l*sin(teta)))/(n*cos(lamda) - g +
l*cos(teta))^2 + (2*l*sin(teta)*(n*sin(lamda) + l*sin(teta))^2)/(n*cos(lamda) - g +
l*cos(teta))^3)*(n*cos(lamda) - g + l*cos(teta)))/(2*((n*sin(lamda) +
l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 + 1)^(1/2)))*(delta_3_static +
((n*sin(lamda) + l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 +
1)^(1/2)*(n*cos(lamda) - g + l*cos(teta)) - 2400);
d_V_lamda_0= k2*((((2*m*cos(lamda)*(m*sin(lamda) + l*sin(teta) + I_1*sin(teta -
431/100)))/(m*cos(lamda) + l*cos(teta) + I_1*cos(teta - 431/100))^2 +
(2*m*sin(lamda)*(m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100))^2)/(m*cos(lamda)
+ l*cos(teta) + I_1*cos(teta - 431/100))^3)*(m*cos(lamda) + l*cos(teta) + I_1*cos(teta
- 431/100)))/(2*((m*sin(lamda) + l*sin(teta) + I_1*sin(teta - 431/100))^2/(m*cos(lamda)
+ l*cos(teta) + I_1*cos(teta - 431/100))^2 + 1)^(1/2)) - m*sin(lamda)*((m*sin(lamda) +
l*sin(teta) + I_1*sin(teta - 431/100))^2/(m*cos(lamda) + l*cos(teta) + I_1*cos(teta -
431/100))^2 + 1)^(1/2))*(delta_2_static + ((m*sin(lamda) + l*sin(teta) + I_1*sin(teta -
431/100))^2/(m*cos(lamda) + l*cos(teta) + I_1*cos(teta - 431/100))^2 +
1)^(1/2)*(m*cos(lamda) + l*cos(teta) + I_1*cos(teta - 431/100)) - 2175) -
k3*(n*sin(lamda)*((n*sin(lamda) + l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 +
1)^(1/2) - (((2*n*cos(lamda)*(n*sin(lamda) + l*sin(teta)))/(n*cos(lamda) - g +
l*cos(teta))^2 + (2*n*sin(lamda)*(n*sin(lamda) + l*sin(teta))^2)/(n*cos(lamda) - g +
l*cos(teta))^3)*(n*cos(lamda) - g + l*cos(teta)))/(2*((n*sin(lamda) +
l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 + 1)^(1/2)))*(delta_3_static +
((n*sin(lamda) + l*sin(teta))^2/(n*cos(lamda) - g + l*cos(teta))^2 +
1)^(1/2)*(n*cos(lamda) - g + l*cos(teta)) - 2400) + grav*m1*n*cos(lamda);
d_V_alpha_0= grav*(623*m2*cos(alpha + 227/100) + 467*m3*cos(alpha + 279/100) -
NC*m1*sin(alpha)) - k1*(b*sin(alpha + 37/20)*((c*sin(csi) + b*sin(alpha +
37/20))^2/(c*cos(csi) + b*cos(alpha + 37/20))^2 + 1)^(1/2) - ((c*cos(csi) + b*cos(alpha
+ 37/20))*((2*b*cos(alpha + 37/20)*(c*sin(csi) + b*sin(alpha + 37/20)))/(c*cos(csi) +
b*cos(alpha + 37/20))^2 + (2*b*sin(alpha + 37/20)*(c*sin(csi) + b*sin(alpha +
37/20))^2)/(c*cos(csi) + b*cos(alpha + 37/20))^3))/(2*((c*sin(csi) + b*sin(alpha +
37/20))^2/(c*cos(csi) + b*cos(alpha + 37/20))^2 + 1)^(1/2)))*(delta_1_static +
((c*sin(csi) + b*sin(alpha + 37/20))^2/(c*cos(csi) + b*cos(alpha + 37/20))^2 +
1)^(1/2)*(c*cos(csi) + b*cos(alpha + 37/20)) - 3025);
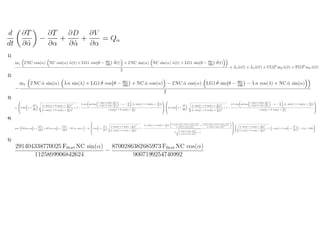
Q_teta_0= -(291404338770025*F0_ext*(LG1*cos(teta - 131/25) - PG1*cos(teta -
307/50)))/1125899906842624 - (8700286382685973*F0_ext*(LG1*sin(teta - 131/25) -
PG1*sin(teta - 307/50)))/9007199254740992;
Q_lamda_0= (291404338770025*F0_ext*n*cos(lamda))/1125899906842624 -
(8700286382685973*F0_ext*n*sin(lamda))/9007199254740992;
Q_alpha_0= (291404338770025*F0_ext*NC*sin(alpha))/1125899906842624 -
(8700286382685973*F0_ext*NC*cos(alpha))/9007199254740992;
[ delta_1_static,delta_2_static,delta_3_static ]= solve (d_V_teta_0 == Q_teta_0,
d_V_lamda_0 == Q_lamda_0, d_V_alpha_0 == Q_alpha_0);](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-37-320.jpg)

![d_d_h3_teta_lamda_0= 0;
d_d_h3_teta_alpha_0= 0;
d_d_h3_lamda_lamda_0= 0;
d_d_h3_lamda_teta_0= 0;
d_d_h3_lamda_alpha_0= 0;
d_d_h3_alpha_alpha_0= -467*sin(alpha + 279/100);
d_d_h3_alpha_teta_0= 0;
d_d_h3_alpha_lamda_0= 0;
%%%%%%%%%%%%%%%%%%%% Stiffness matrix
Stiffness_jacobian= [ d_a_teta_0, d_a_lamda_0, d_a_alpha_0;
d_j_teta_0, d_j_lamda_0, d_j_alpha_0;
d_h_teta_0, d_h_lamda_0, d_h_alpha_0 ];
kf_vector= [ k1,k2,k3 ]; % vector of the actuator stiffnesses
Kf=diag( kf_vector );
K_el_I_1= Stiffness_jacobian'*Kf*Stiffness_jacobian;
Stiffness_hessian_1= [ d_d_a_teta_teta_0, d_d_a_teta_lamda_0, d_d_a_teta_alpha_0
d_d_a_lamda_teta_0, d_d_a_lamda_lamda_0, d_d_a_lamda_alpha_0
d_d_a_alpha_teta_0, d_d_a_alpha_lamda_0, d_d_a_alpha_alpha_0
];
Stiffness_hessian_2= [ d_d_j_teta_teta_0, d_d_j_teta_lamda_0, d_d_j_teta_alpha_0
d_d_j_lamda_teta_0, d_d_j_lamda_lamda_0, d_d_j_lamda_alpha_0
d_d_j_alpha_teta_0, d_d_j_alpha_lamda_0, d_d_j_alpha_alpha_0
];
Stiffness_hessian_3= [ d_d_h_teta_teta_0, d_d_h_teta_lamda_0, d_d_h_teta_alpha_0
d_d_h_lamda_teta_0, d_d_h_lamda_lamda_0, d_d_h_lamda_alpha_0
d_d_h_alpha_teta_0, d_d_h_alpha_lamda_0, d_d_h_alpha_alpha_0
];
delta_1_static= 51.27;
delta_2_static= 0.71;
delta_3_static= 31.81;
K_el_I_1I_1= k1*delta_1_static*Stiffness_hessian_1 +
k2*delta_2_static*Stiffness_hessian_2 + k3*delta_3_static*Stiffness_hessian_3;
Height_hessian_1= [ d_d_h1_teta_teta_0, d_d_h1_teta_lamda_0, d_d_h1_teta_alpha_0
d_d_h1_lamda_teta_0, d_d_h1_lamda_lamda_0, d_d_h1_lamda_alpha_0](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-44-320.jpg)
![d_d_h1_alpha_teta_0, d_d_h1_alpha_lamda_0, d_d_h1_alpha_alpha_0
];
Height_hessian_2= [ d_d_h2_teta_teta_0, d_d_h2_teta_lamda_0, d_d_h2_teta_alpha_0
d_d_h2_lamda_teta_0, d_d_h2_lamda_lamda_0, d_d_h2_lamda_alpha_0
d_d_h2_alpha_teta_0, d_d_h2_alpha_lamda_0, d_d_h2_alpha_alpha_0
];
Height_hessian_3= [ d_d_h3_teta_teta_0, d_d_h3_teta_lamda_0, d_d_h3_teta_alpha_0
d_d_h3_lamda_teta_0, d_d_h3_lamda_lamda_0, d_d_h3_lamda_alpha_0
d_d_h3_alpha_teta_0, d_d_h3_alpha_lamda_0, d_d_h3_alpha_alpha_0
];
K_g= grav* ( m1*Height_hessian_1 + m2*Height_hessian_2 + m3*Height_hessian_3 );
K= K_el_I_1 + K_el_I_1I_1 + K_g;
%%%%%%%%%%%%%%%%%%%% Damping matrix
Rf_vector= [ c1,c2,c3 ];
Rf= diag( Rf_vector );
R= Stiffness_jacobian'*Rf*Stiffness_jacobian;
syms teta_dot lamda_dot alpha_dot F0_ext de_alpha de_lamda de_teta
v1x= -teta_dot*LG1*cos(6.81-teta)-alpha_dot*NC*cos(alpha)-lamda_dot*n*sin(lamda);
v1y= teta_dot*LG1*sin(6.81-teta)-alpha_dot*NC*sin(alpha)+lamda_dot*n*cos(lamda);
%%%%%%% Mass Jacobian Jm
Jm_vector= [ m1,m1,m2,m3,J1,J2,J3 ];
Mf= diag( Jm_vector );
Jm= [ -LG1*cos(6.81-teta), -NC*cos(alpha), -n*sin(lamda)
LG1*sin(6.81-teta), -NC*sin(alpha), n*cos(lamda)
0, 0, CG2
0, 0, FG3
1, 0, 0
0, 0, 1
0, 0, 1 ];
M= Jm'*Mf*Jm;](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-45-320.jpg)
![%%%%%% Virtual work linearization / Force jacobian
de_s_x= -NC*cos(alpha)*de_alpha - n*sin(lamda)*de_lamda - ( LG1*sin(teta-5.24) +
PG1*sin(6.14-teta) )*de_teta;
de_s_y= -NC*sin(alpha)*de_alpha - n*cos(lamda)*de_lamda + ( LG1*cos(teta-5.24) -
PG1*cos(6.14-teta) )*de_teta;
Jf= [ -LG1*sin(teta-5.24) - PG1*sin(6.14-teta), - n*sin(lamda), -NC*cos(alpha)
LG1*cos(teta-5.24) - PG1*cos(6.14-teta), - n*cos(lamda), -NC*sin(alpha)
];
force_vector= [ F0_ext*cosd(15); -F0_ext*sind(15) ];
Q= Jf'*force_vector;
%%
%%%%%%%%%%% Natural frequencies and vibration modes
M= 1.0e+11 *[ 0.1485 -0.0479 -0.3974
-0.0479 0.3944 -0.3723
-0.3974 -0.3723 1.9553 ];
K= 1.0e+12 * [ 1.6607 -0.2285 0
-0.2285 0.2390 0
0 0 0.2513 ];
R= 1.0e+10* [ 1.6630 -0.2309 0
-0.2309 0.2392 0
0 0 0.2496 ];
A= inv(M)*K;
[ phi,natural_frequencies_squared ]= eig(A);
natural_frequencies= sqrt(natural_frequencies_squared);
%%%%%%%%%%% FRF frequency response function
F0_ext=1;
LG1=675;
alpha= 1.19; %68
teta= 6.23; %357
lamda= 4.80; %275;
PG1=2550;
n=2300;
NC=1100;
force_vector= [ F0_ext*cosd(15); -F0_ext*sind(15) ];
Jf= [ -LG1*sin(teta-5.24) - PG1*sin(6.14-teta), - n*sin(lamda), -NC*cos(alpha)
LG1*cos(teta-5.24) - PG1*cos(6.14-teta), - n*cos(lamda), -NC*sin(alpha)
];
Q= Jf'*force_vector;
max_natural_frequency=max(max(natural_frequencies));
omega=linspace(0,2*max_natural_frequency,300); % grafico fino a tre volte la
massima frequenza
length_omega=length(omega);
TETA=[];
LAMDA=[];](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-46-320.jpg)
![ALPHA=[];
for ii=1:length_omega
AA= -(omega(ii))^2*M + 1i*omega(ii)*R + K;
z_0= inv(AA)*Q;
teta_0= z_0(1);
lamda_0= z_0(2);
alpha_0= z_0(3);
TETA= [ TETA,teta_0 ];
LAMDA= [ LAMDA,lamda_0 ];
ALPHA= [ ALPHA,alpha_0 ];
end
amplitude_TETA= abs( TETA );
amplitude_LAMDA= abs( LAMDA );
amplitude_ALPHA= abs( ALPHA );
angle_TETA= angle( TETA );
angle_LAMDA= angle( LAMDA );
angle_ALPHA= angle( ALPHA );
figure(1)
plot( omega,amplitude_TETA )
title( 'amplitude teta' )
xlabel('Omega')
ylabel('FRF theta')
figure(2)
plot( omega,amplitude_LAMDA )
title( 'amplitude lamda' )
xlabel('Omega')
ylabel('FRF lambda')
figure(3)
plot( omega,amplitude_ALPHA )
title( 'amplitude alpha' )
xlabel('Omega')
ylabel('FRF alpha')
figure(4)
plot( omega,angle_TETA )
title( 'phase teta' )
xlabel('Omega')
ylabel('FRF theta')
figure(5)
plot( omega,angle_LAMDA )
title( 'phase lamda' )
xlabel('Omega')
ylabel('FRF lambda')
figure(6)
plot( omega,angle_ALPHA )
title( 'phase alpha' )
xlabel('Omega')
ylabel('FRF alpha')](https://image.slidesharecdn.com/59e9663f-0af9-436e-9dab-bd7580703054-160126134510/85/Bazzucchi-Campolmi-Zatti-47-320.jpg)















































