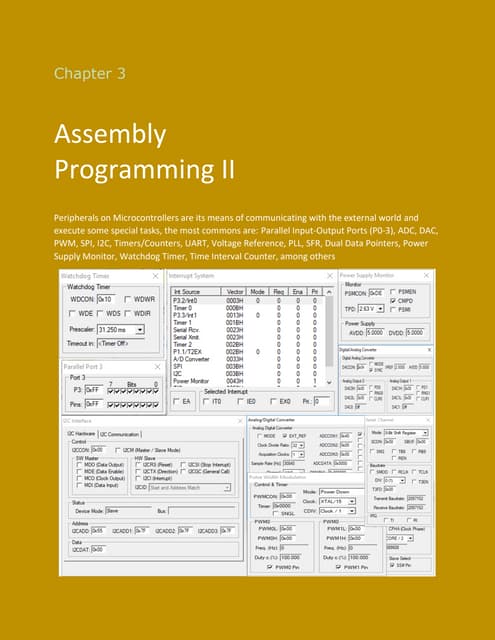
The document provides documentation for a quadcopter flight controller project using an Arduino Due and Kalman filters. It describes the author's process of setting up the Arduino Due in Atmel Studio instead of the Arduino IDE to better understand register settings. It details how to initialize various functions needed for the project, including uploading code, declaring pins, timers, I2C communication, UART, and interrupts. The author worked through issues with i2c communication and resetting, and provided code samples for initializing each required function.



![But my code still runs without any problem. Maybe the Write Protect Mode was already undone by
SystemInit().As my code was working anyway, I didn’t bother to check up. And following is the code
to disable the Write Protect Mode.
PMC->PMC_WPMR &= ~(PMC_WPMR_WPEN); //Disable the Write Protect Mode
CREATE TIMER FUNCTIONS TO CREATE DELAYS OF SPECIFIC INTERVALS
In my project, I need a precision of at most 1 us. So I need a clock frequency of at least 1 MHz. There
are two sections in the datasheet through which we can create such timers. One is Section 13 RTT
(Real Time Timer) and the other is Section 36 TC (Timer Counter).
The RTT runs through the SWCLK (SLOW CLOCK) that has a clock frequency of 32.768 kHz, thus, is
not suitable for this project.
The TC can be made to run from 5 internal clock sources, that are MCK/2, MCK/8, MCK/32, MCK/128
and SWCLK (MCK refers to MAIN CLOCK). As sam3x8e is running at 84 MHz (MCK), the usable
frequencies are MCK/2, MCK/8 and MCK/32. I chose to use MCK/8 or 10.5 MHz for my clock frequency.
I found this blog which may be useful. The following is the code used for setting up the timer.
//Configure PMC
//Disable the Write Protect Mode
PMC->PMC_WPMR &= ~(PMC_WPMR_WPEN);
//Enable TC0 Peripheral Clock
PMC->PMC_PCER0 |= PMC_PCER0_PID27;
//Disable the Write Protect Mode
TC0->TC_WPMR &= ~(TC_WPMR_WPEN);
//Set Clock Source to MCK/8
TC0->TC_CHANNEL[0].TC_CMR |= TC_CMR_TCCLKS_TIMER_CLOCK2;
//Set Wave select to updown
TC0->TC_CHANNEL[0].TC_CMR |= TC_CMR_WAVE | TC_CMR_WAVSEL_UPDOWN;
//Enable Clock and trigger to start counter
TC0->TC_CHANNEL[0].TC_CCR |= TC_CCR_CLKEN | TC_CCR_SWTRG;
The following line of code is used to load the real time counter value onto a variable.
//Read current value from Counter Value Register
uint32_t counter = TC0->TC_CHANNEL[0].TC_CV;
ACTIVATE TWI INTERFACE TO COMMUNICATE WITH I2C SENSORS
This part is described in the datasheet under Section 33 Two-Wire Interface (TWI).There are two TWI
channels. I’m using the second channel (TWI1) which are pins SDA and SCL of Arduino Due and pins
B12 and B13 of sam3x8e (see the pin out).
First of all, I programmed the PIO controller to dedicate TWD and TWCK as peripheral lines. Then,
enabled the peripheral clock. And set the mode of operation to Master Mode. The steps of using TWI
in different modes are neatly displayed in a flowchart at the end of the TWI section.](https://image.slidesharecdn.com/itspdocumentation-quadcopterflightcontrollerbasedonkalmanfilters-190804205017/85/Itsp-documentation-quadcopter-flight-controller-based-on-kalman-filters-4-320.jpg)