This document discusses mechanisms and kinematic chains, specifically:
1. It defines inversion of mechanisms as obtaining different mechanisms by fixing different links in a kinematic chain.
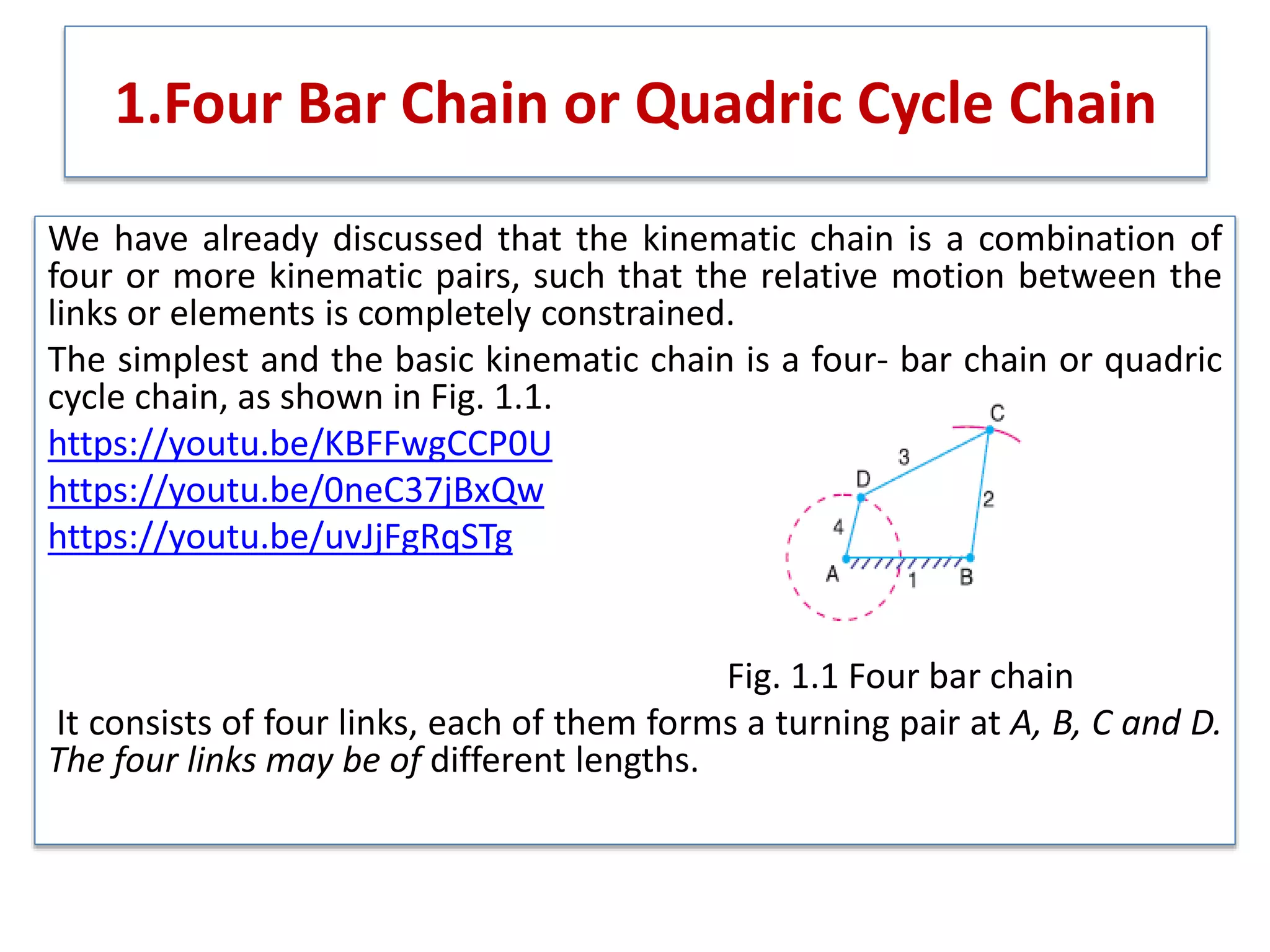
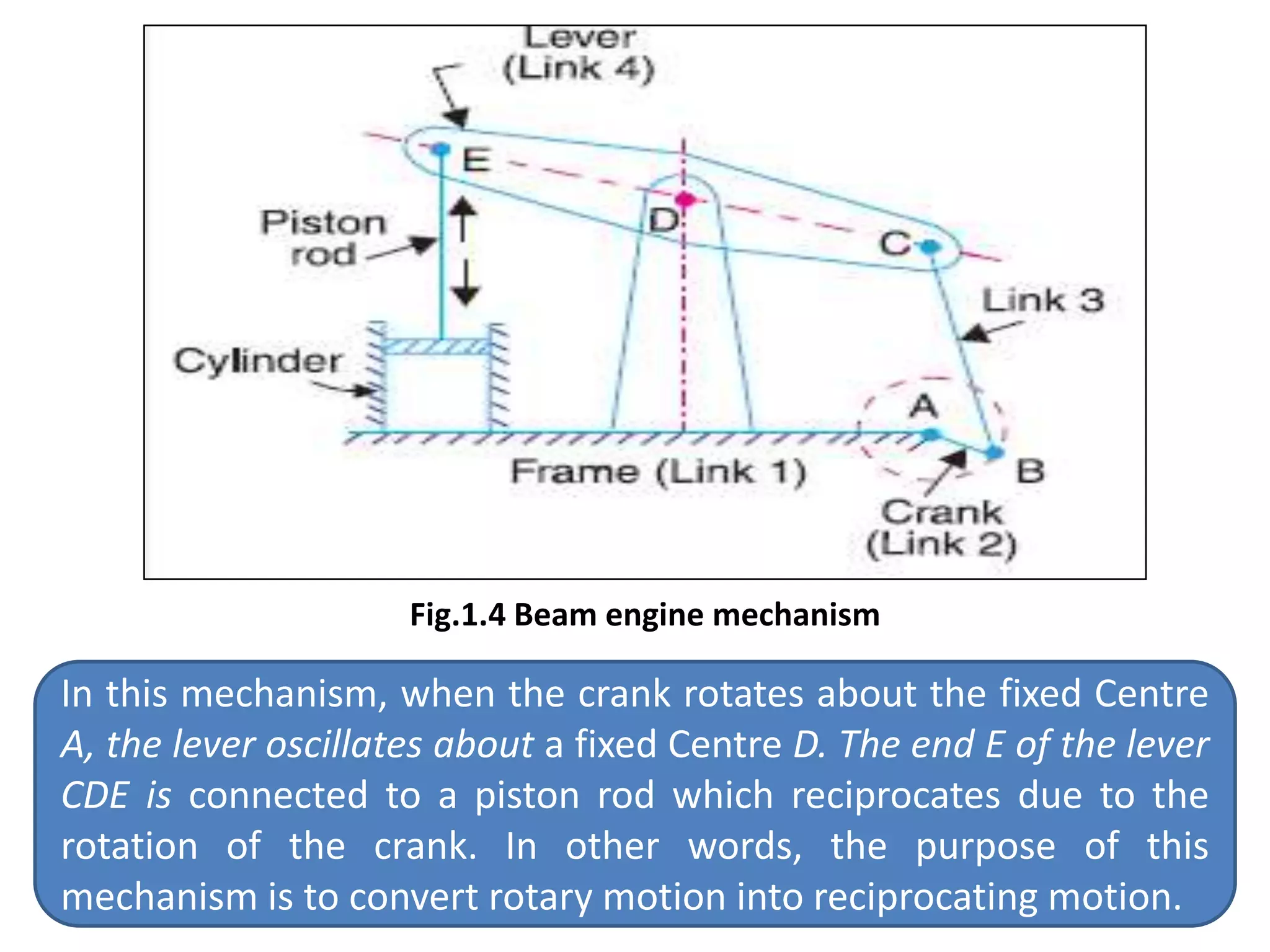
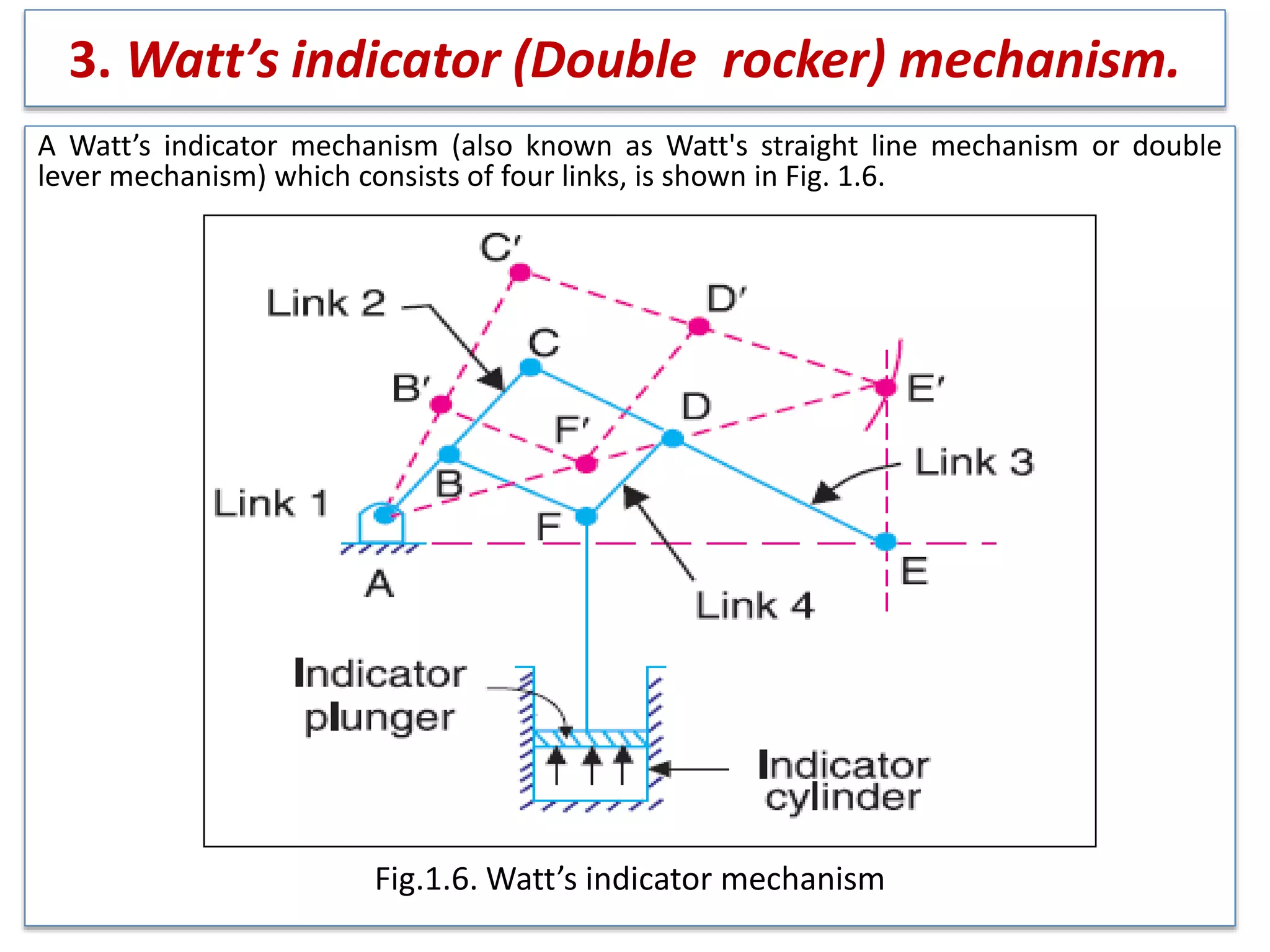
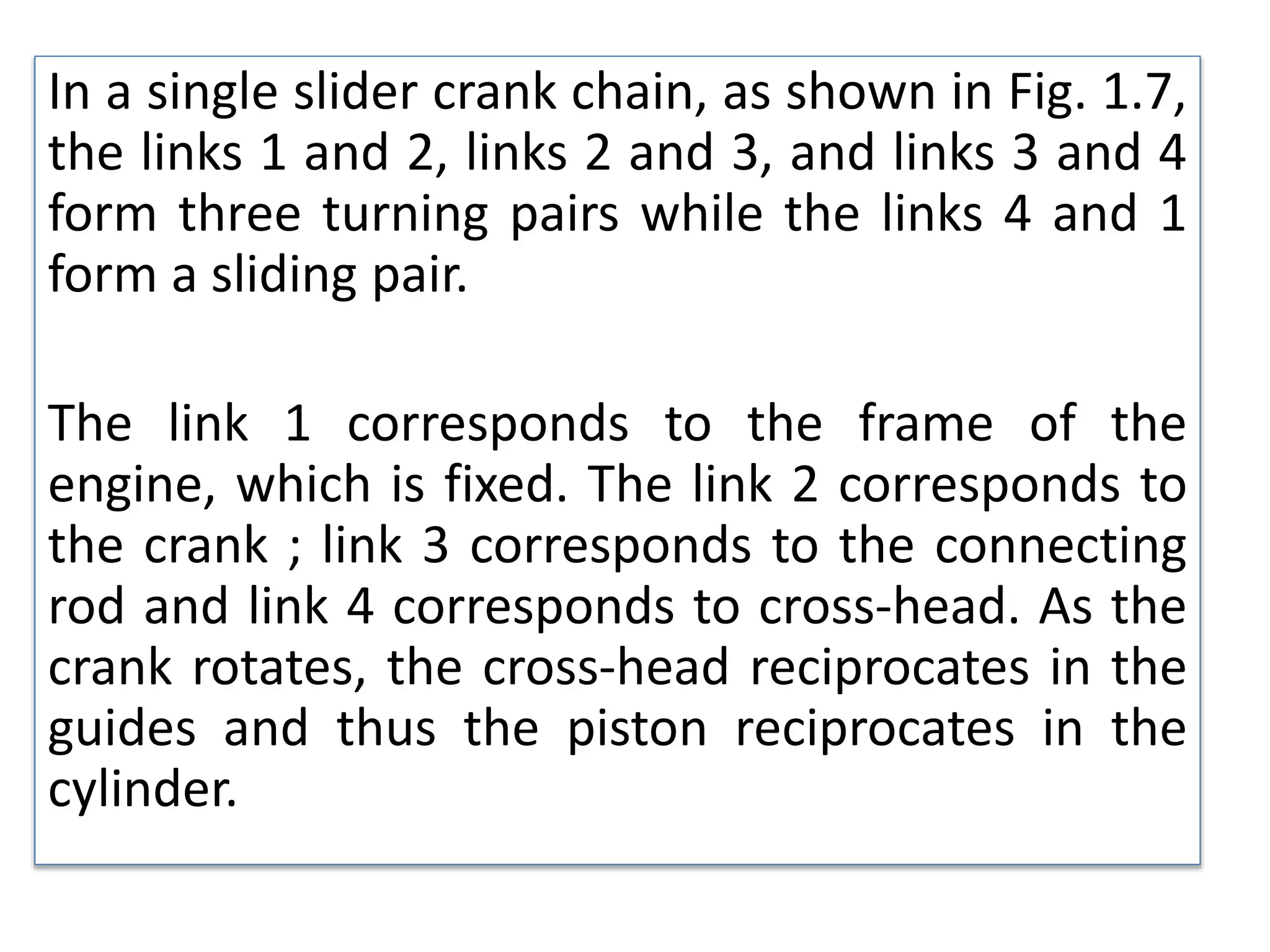
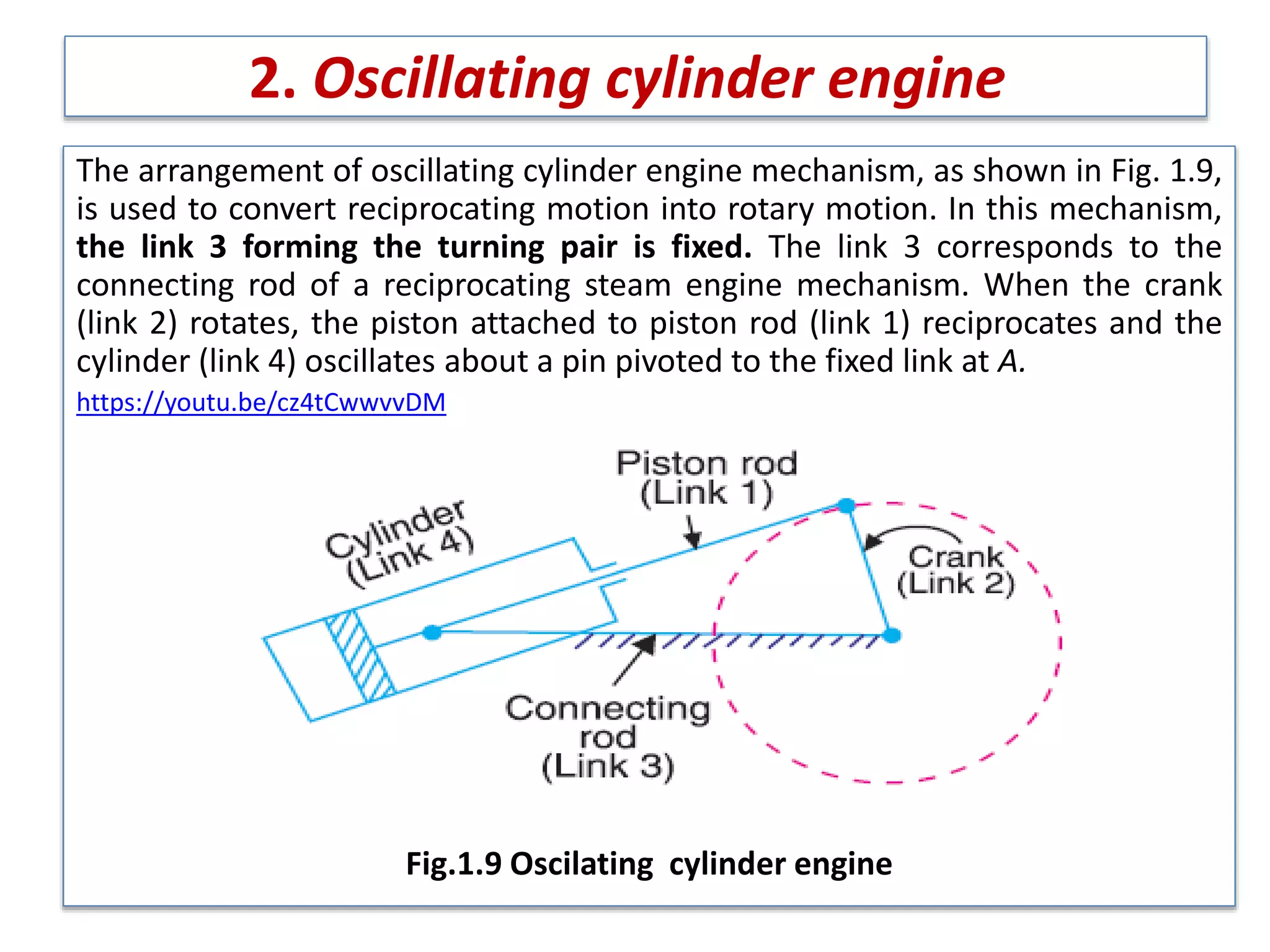
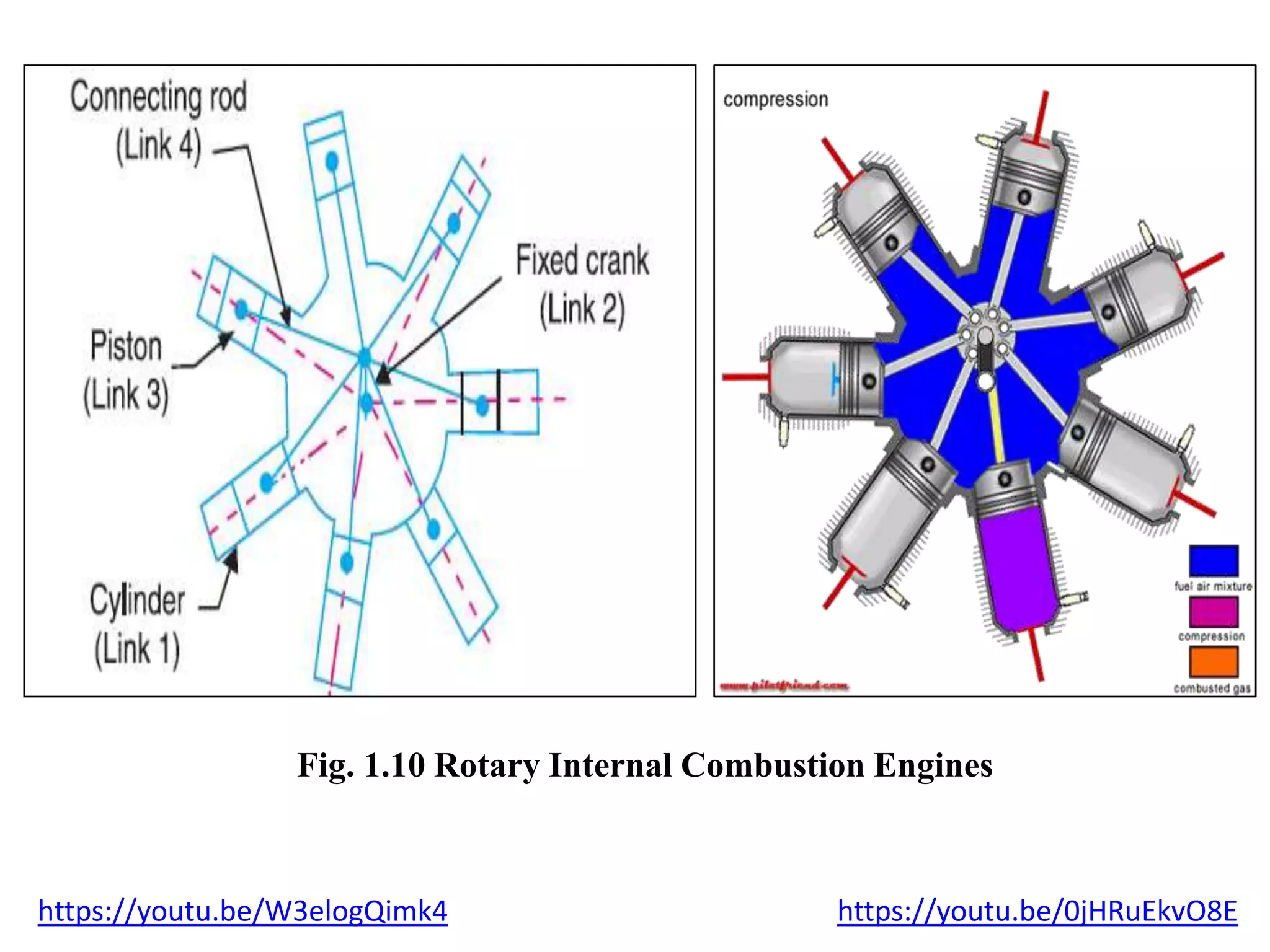
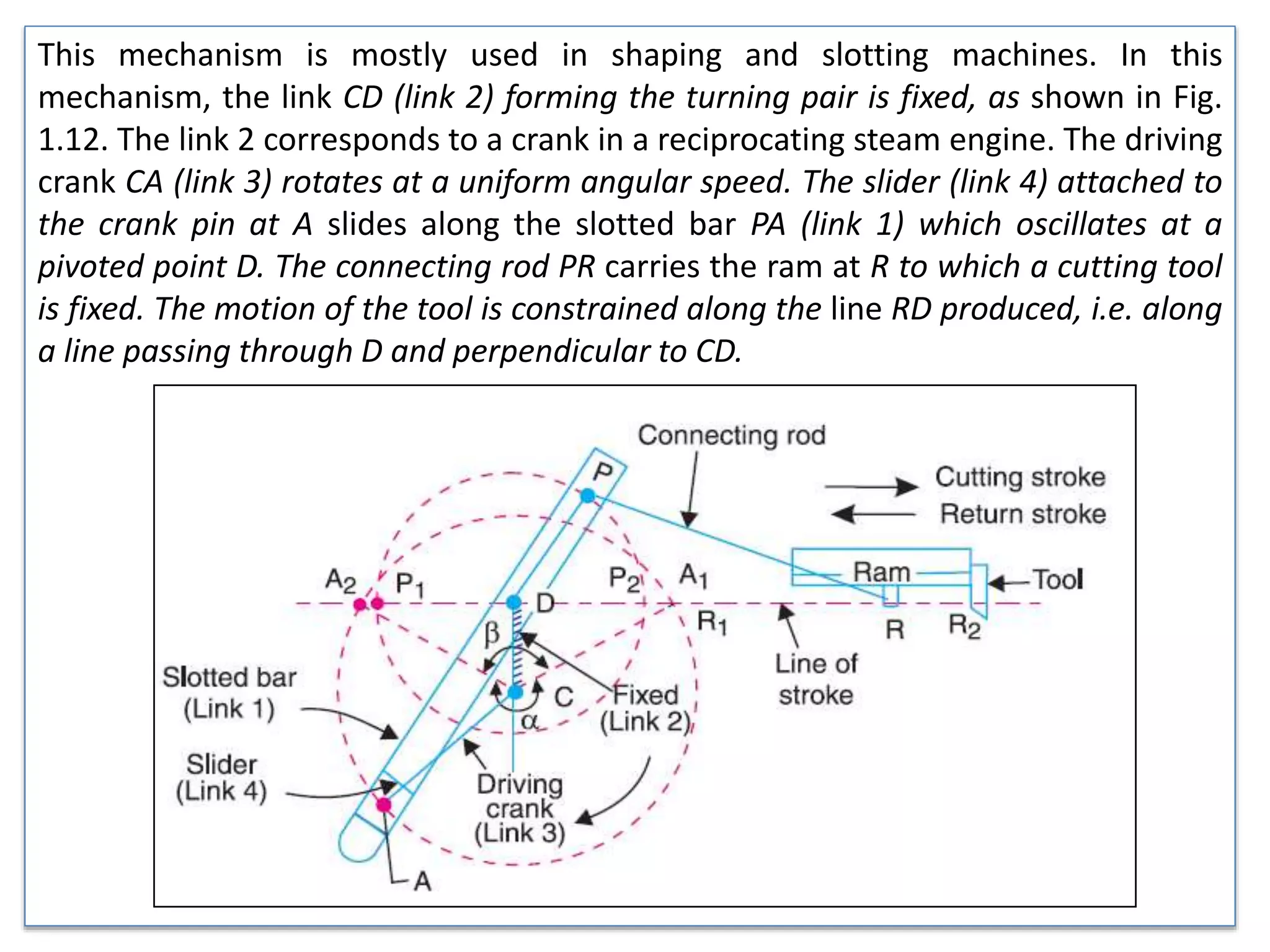
2. It describes the four most important kinematic chains: four bar chain, single slider crank chain, double slider crank chain, and their various inversions which are used in mechanisms like beam engines, locomotives, and machines.
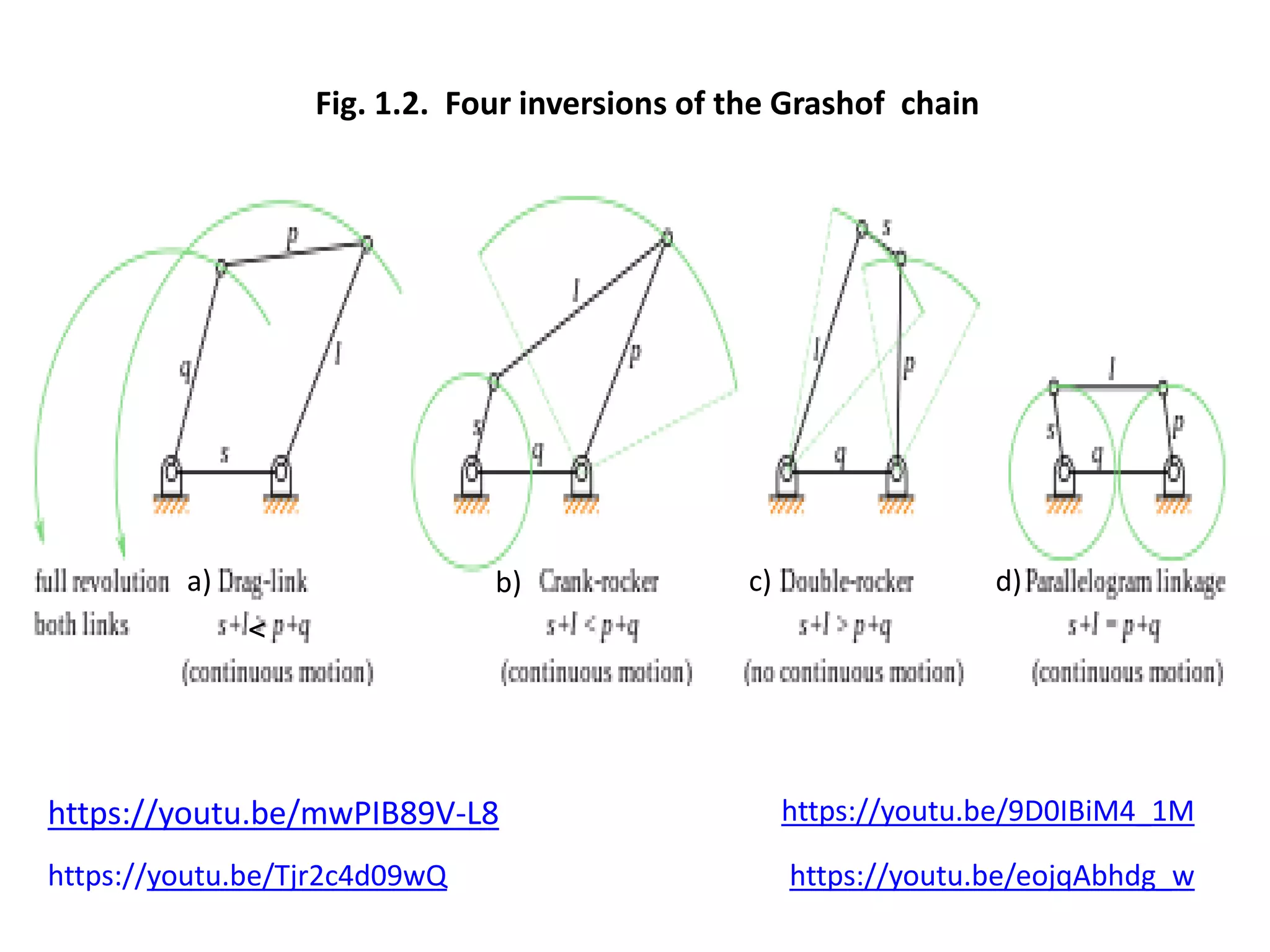
3. It explains Grashof's law for four bar mechanisms and discusses different types of four bar inversions like drag-link, crank-rocker, double-rocker, and parallelogram mechanisms.