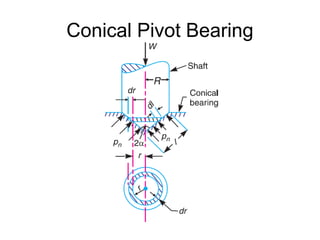
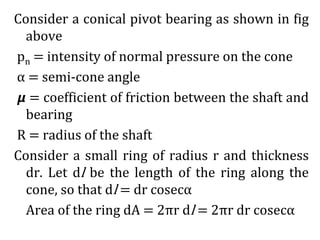
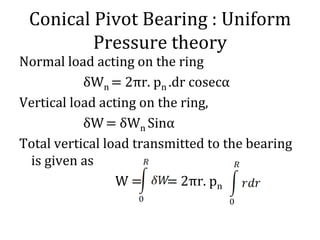
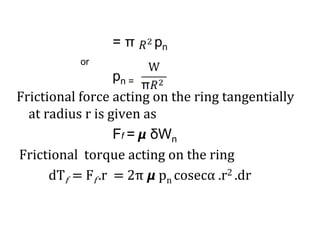
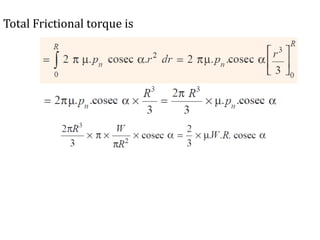
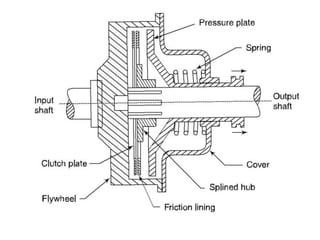
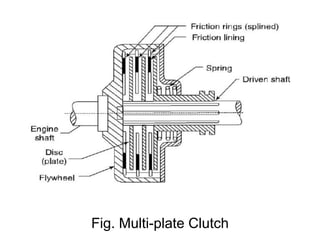
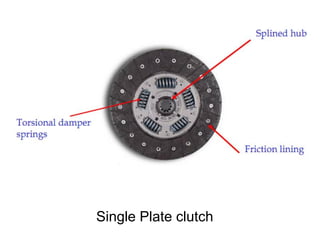
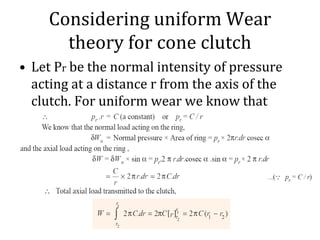
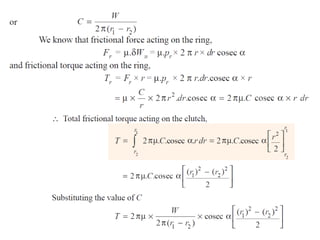
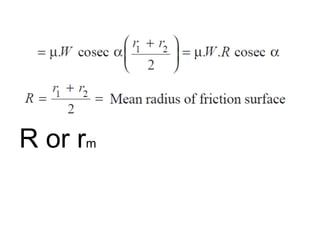
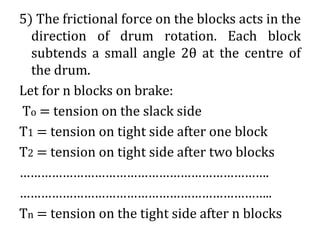
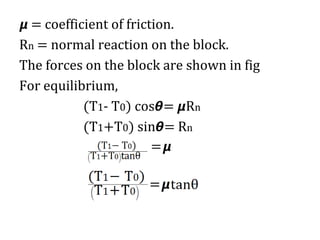
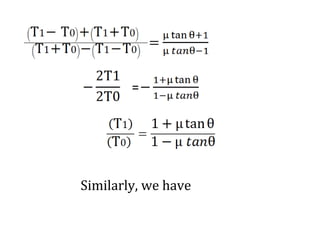
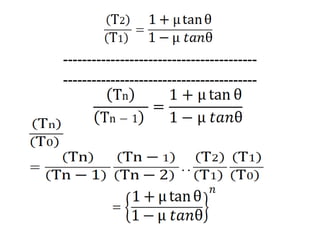
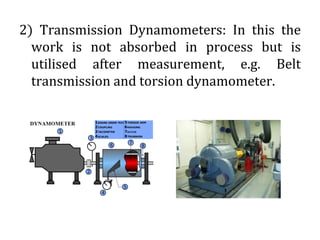
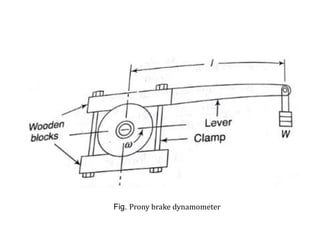
The document provides a comprehensive overview of friction clutches and their various types, such as single-plate, multi-plate, cone, and centrifugal clutches, detailing their construction, working mechanisms, and differences. It also discusses the principles of pivot bearings, their types, as well as different braking systems including block, band, and internal expanding shoe brakes. Additionally, the text touches on the functioning of dynamometers, categorized into absorption and passive types, for measuring force, torque, or power.