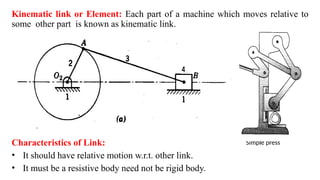
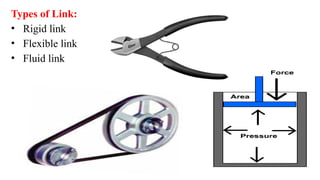
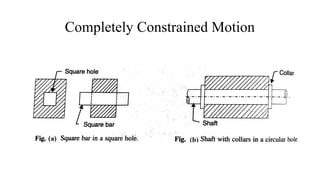
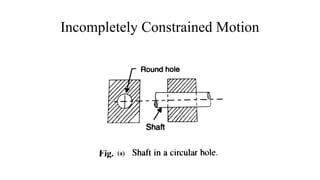
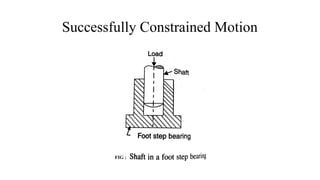
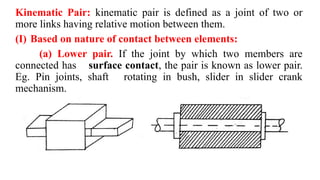
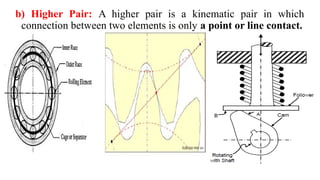
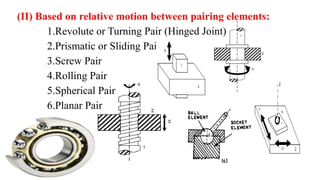
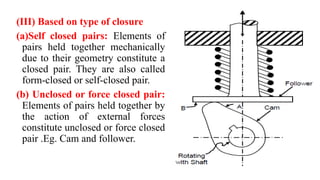
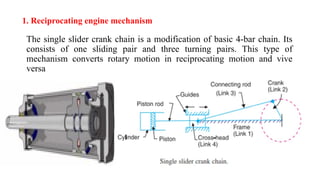
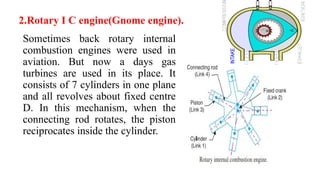
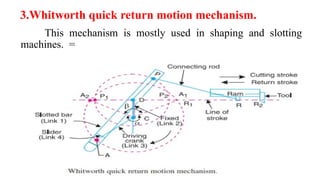
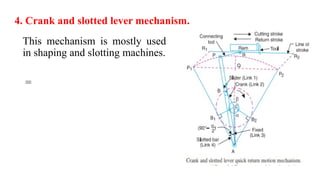
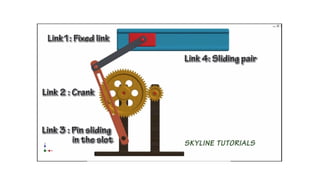
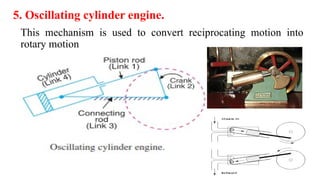
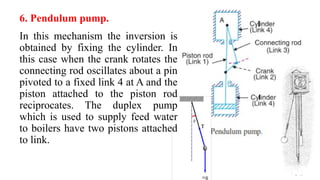
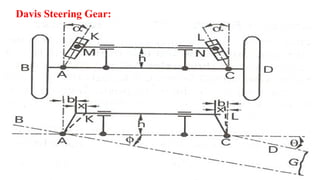
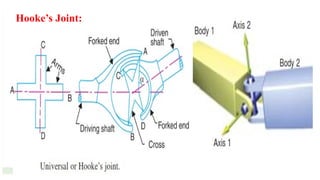
The document discusses the Theory of Machines, focusing on the relative motion between machine parts and the forces acting on them, essential for engineering design. It covers kinematic and dynamic concepts, types of links and pairs, and various mechanisms along with their inversions, illustrating how motion is transmitted through different configurations. Additionally, it includes detailed explanations of kinematic chains, degrees of freedom, and specific mechanisms for converting motion types.