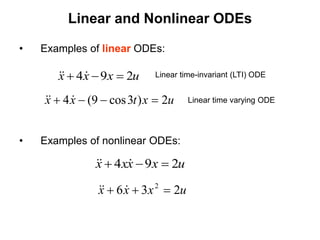
This document provides an introduction and overview of a course on dynamic systems and control (DSC). The course aims to teach students how to model, analyze, and design physical systems like mechanical, electrical, and fluid systems. It will cover modeling dynamic systems using differential equations, analyzing system response using analytical and numerical methods, and introducing feedback control systems. Students will learn through both theoretical discussions and real-world examples from industry. The course outline indicates it will cover topics like modeling different physical systems, dynamic response analysis in time and frequency domains, and feedback control design.





























![[Katsuhiko ogata] system_dynamics_(4th_edition)(book_zz.org)](https://cdn.slidesharecdn.com/ss_thumbnails/7ssfatynr0etpmmk5kcp-signature-6ac5206b27c2bb7b2bb24ba2afd6cd8c40ac57a8f3fb8a45f54486315e6207ed-poli-150505233422-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)





































