The document discusses interprocess communication (IPC) methods, focusing on shared memory and message passing as fundamental models. It outlines the mechanisms of both models, including their operations, advantages, and simplifications for process interaction. The document also elaborates on the creation and management of pipes for IPC, illustrating their use between related processes along with examples of unnamed and named pipes.



























![File
Descriptors
files
…
fd[1]
fd[2]
…
fd[255]
f_po
s
f_inod
e
…
…
• PCB of each process keeps track of open files
• Pointer to file_struct, a kernel-resident array data
structure containing the details of open files
PCB
file_struct
2-
Process
28
file
f_mod
e
File operation
routines
f_o
p](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-28-320.jpg)
![File
Descriptors
• files_struct contains pointers to file data structures
– Each one describes a file being used by this process
• f_mode: Describes file mode, read only, read and write or
write only
• f_pos: Holds the position in the file where the next read or
write operation will occur
• f_inode: Points at the actual file
files
fd[1]
fd[2]
…
fd[255]
f_po
s
f_inod
e
…
…
file_struc
t
…
file
f_mod
e
PC
B
File operation
routines
f_o
p
2-
Process
68](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-29-320.jpg)
![File
Descriptors
• When a process opens a file, one of the free file pointers in
the
files_struct is used to point to the new file structure
• When Unix processes do any sort of I/O, they do it by reading
or writing to a file descriptor
– A file descriptor is simply an integer associated with an
open file
• All accesses to files are via standard system calls which
pass or return file descriptors
files
fd[1]
fd[2]
…
fd[255]
f_po
s
f_inod
e
…
…
file_struc
t
…
file
f_mod
e
PC
B
File operation
routines
f_o
p
2-
Process
30](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-30-320.jpg)

![Standard Input, Output, Error:
Example
2-
Process
32
• Read from standard input (by default it is keyboard)
– char buffer[10];
– read(0,buffer,5);
• Write to standard output (by default is is monitor))
– char buffer[10];
– write(1,buffer,5);
• By changing the file descriptors we can write to files
• fread/fwrite etc. are wrappers around the above
read/write
functions](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-32-320.jpg)


![Pipe
s
Pip
e
write(
)
read(
)
Pfd[1
]
Pfd[0
]
• Shared info in kernel’s memory
Buffer in
kernel’s
memory
2-
Process
35](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-35-320.jpg)

![Pipe
s
2-
Process
76
Buffer not
File on Hard
disk
files
fd[2]
fd[3]
…
fd[255
] f_pos
f_inod
e …
…
Pip
e
file
table
…
file
f_mod
e
PC
B
f_po
s
f_inod
e
…
…
file
f_mod
e
Pipe
operation
routines
f_o
p
f_o
p
Pipe
operation
routines](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-37-320.jpg)
![(Unnamed) Pipe
Creation
Two methods for creating (unnamed) pipes
• pipe system call
#include <unistd.h>
int pipe(int filedes[2]);
– Creates a pair of file descriptors pointing to a pipe inode
– Places them in the array pointed to by filedes
filedes[0] is for reading
filedes[1] is for writing
– Return value: Success returns zero; error returns -1
• popen system call
FILE *popen(const char *command, const char
*type); FILE* file = popen("ntpdate", "r");
– Opens a process by creating a pipe, forking, and invoking
the shell 2-
Process
38](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-38-320.jpg)
![Pipe
Creation
int main()
{
int pfds[2];
if (pipe(pfds) == -1)
{
perror("pipe"
); exit(1);
}
}
pfds[1
]
2-
Process
39
pfds[0
]
Proces
s
Kernel
Pipe
flow of data](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-39-320.jpg)
![Pipe
Example
int main()
{
int pfds[2];
if (pipe(pfds) == -1)
{
perror("pipe"
); exit(1);
}
printf("writing to file descriptor #%dn",
pfds[1]); write(pfds[1], "test", 5);
printf("reading from file descriptor #%d
n",pfds[0]); read(pfds[0], buf, 5);
printf("read %sn", buf);
2-Process
} 79](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-40-320.jpg)

![Piping Between Parent and
Child
Pipe
flow of
data
Proces
s
Kerne
l
pfds[1
]
Child
pfds[0
]
Parent
pfds[0
]
2.
fork()
2-
Process
42
pfds[1]
1.
pipe()](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-42-320.jpg)
![Piping Between Parent and
Child
Pipe
flow of
data
Proces
s
Kerne
l
pfds[1
]
pfds[0
]
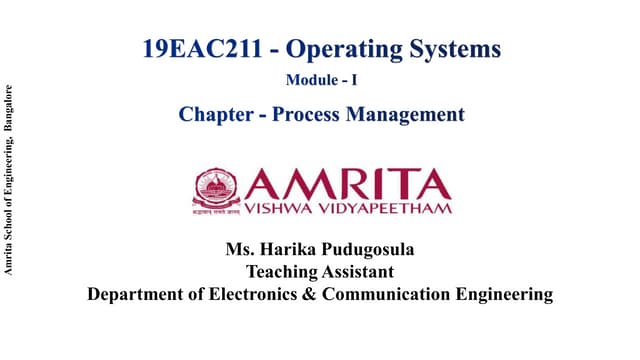
• To allow one way communication each process should close
one end of the pipe
Parent Child
2.
fork()
pfds[1] 3.
close(pfds[1])
1. pipe()
4. close(pfds[0]) pfds[0]
2-
Process
43](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-43-320.jpg)

![Pipe
Example
int main() {
int pfds[2]; char buf[30];
pipe(pfds);
if (!fork()) {
close(pfds[0]);
printf(" CHILD: writing to the pipe
n");
write(pfds[1], "test", 5);
printf(" CHILD: exiting
n"); exit(0);
}
else {
close(pfds[1]);
printf("PARENT: reading
from pipen");
read(pfds[0], buf, 5);
printf( "PARENT: read "%s"n", buf);
wait(NULL);
}
} 2-
Process
84](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-45-320.jpg)
![Full Duplex Communication via Two
Pipes
Parent
p1fd[1
]
2-
Process
46
p2fd[0]
Pipe 1
Pipe
2
Child
p2fd[1
]
p1fd[0
]](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-46-320.jpg)

![Named Pipe
Example
Process 1
int main() {
int fd;
char * myfifo =
"/tmp/myfifo";
/* create the FIFO(named
pipe)*/
mkfifo(myfifo, 0666);
/* write "Hi" to the FIFO
*/ fd = open(myfifo,
O_WRONLY); write(fd, "Hi",
sizeof("Hi")); close(fd);
/* remove the FIFO */
unlink(myfifo);
return 0;
}
Process 2
#define MAX_BUF 1024
int main() {
int fd;
char * myfifo =
"/tmp/myfifo";
char buf[MAX_BUF];
/* open, read, and display
the message from the
FIFO */
fd = open(myfifo, O_RDONLY);
read(fd, buf, MAX_BUF);
printf("Received: %sn",
buf); close(fd);
2-
Process
48
return
0;
}](https://image.slidesharecdn.com/chapter3-interprocesscommunication-241103122354-931c1d9b/85/Chapter-3-InterProcess-Communication-pptx-48-320.jpg)