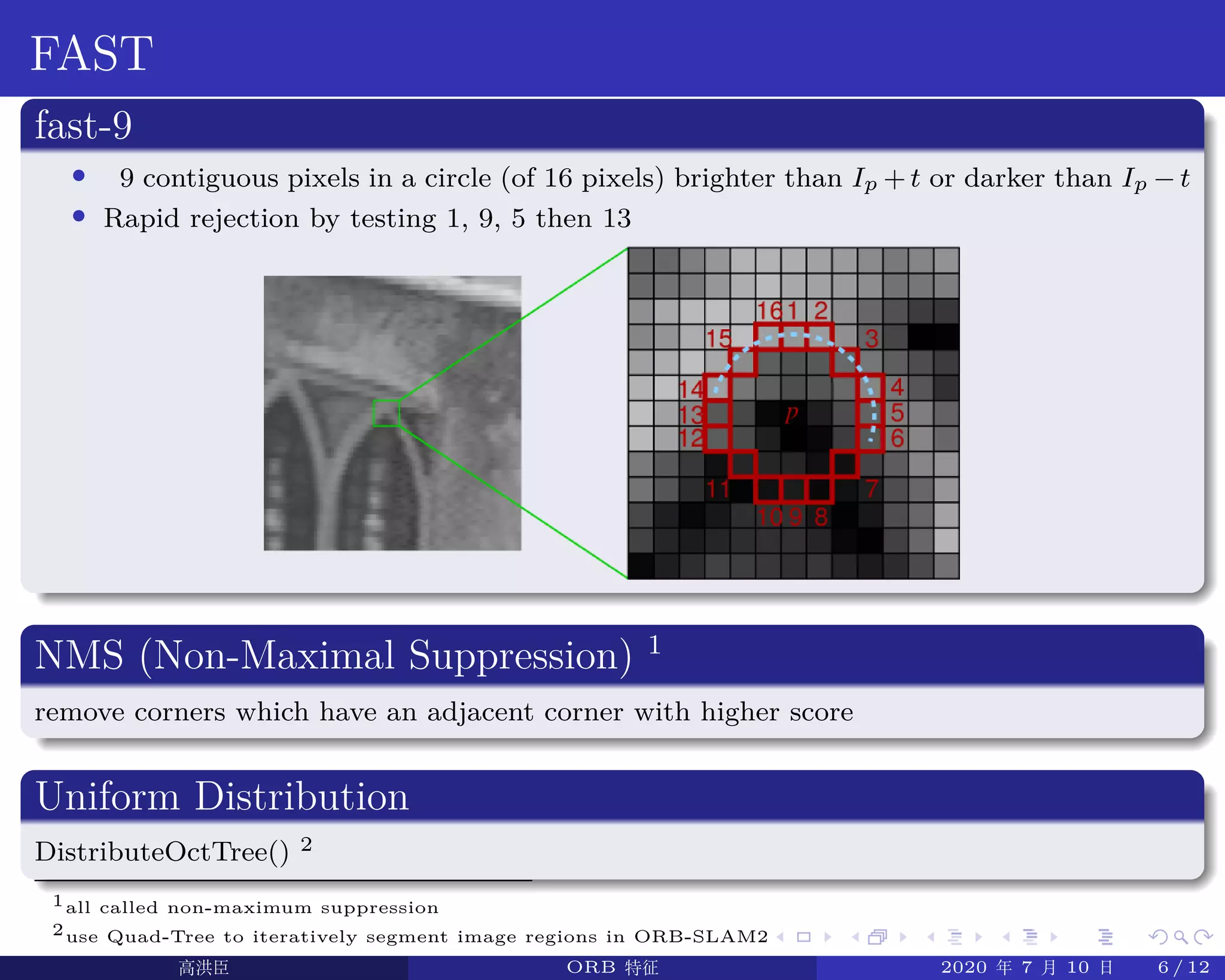
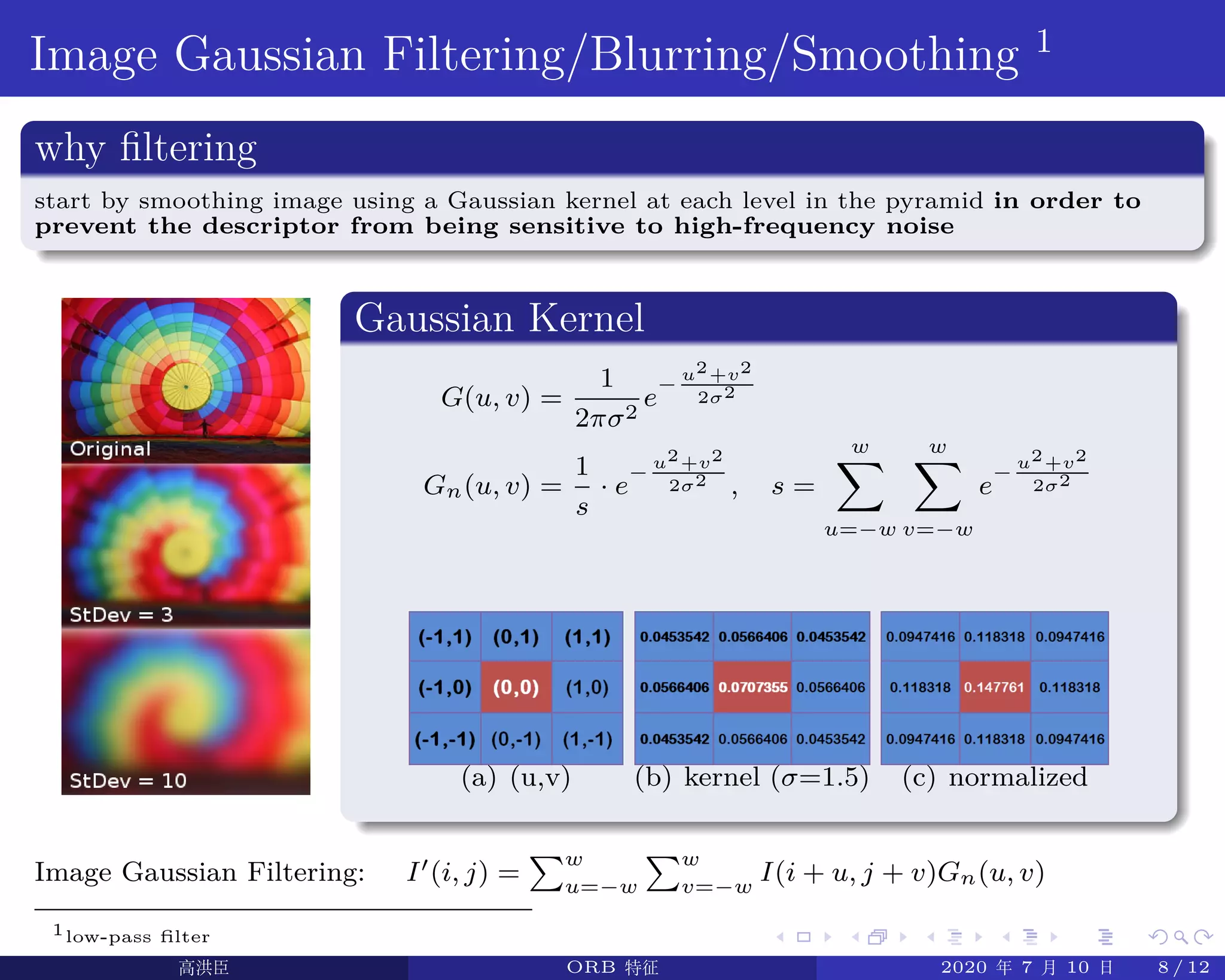
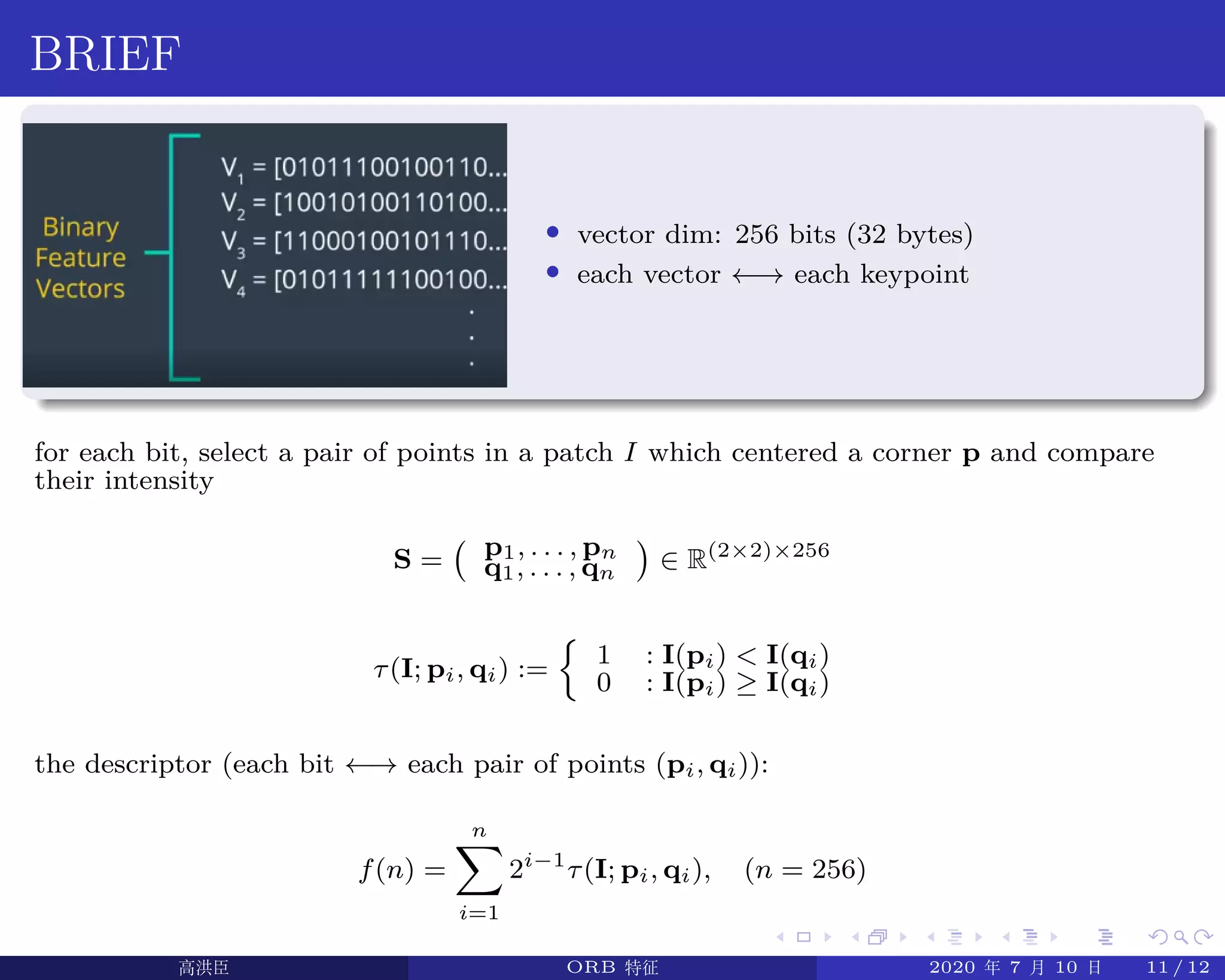
This document describes the ORB (Oriented FAST and Rotated BRIEF) image feature detection and description algorithm. It first discusses image features in general, including corner detection methods like FAST, BRIEF and SIFT. It then provides an overview of ORB, which combines oFAST for keypoint detection with rBRIEF for descriptor extraction. The document proceeds to explain the details of the ORB algorithm, including using an image pyramid for scale invariance, computing keypoint orientations, and generating rotation-invariant BRIEF descriptors.

![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
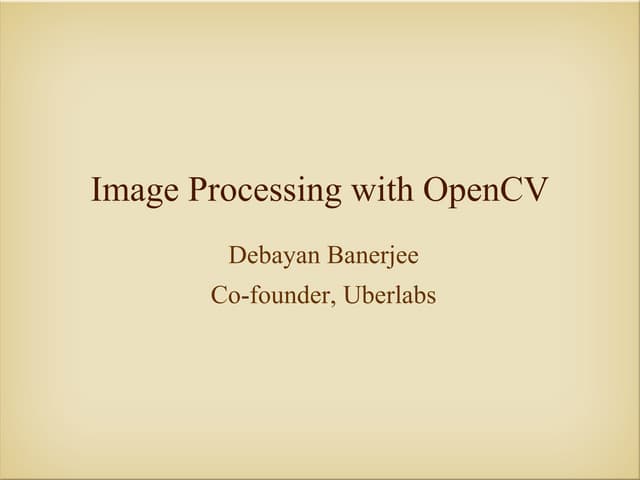
Orientation by Intensity Centroid (IC)
the moments of a patch:
mpq =
∑
x,y
xp
yq
I(x, y)
the first order moment of a patch 1
I (radius = 15):
m10 =
15∑
x=−15
15∑
y=−15
xI(x, y) =
15∑
y=0
15∑
x=−15
x [I(x, y) − I(x, −y)]
m01 =
15∑
x=−15
15∑
y=−15
yI(x, y) =
15∑
y=1
15∑
x=−15
y [I(x, y) − I(x, −y)]
the intensity centroid:
C =
(
m10
m00
,
m01
m00
)
the orientation (from the corner’s center to the centroid):
θ = atan 2 (m01, m10)
1a circular patch
高洪臣 ORB 特征 2020 年 7 月 10 日 7 / 12](https://image.slidesharecdn.com/orbfeaturetexbeamer-201206052845/75/Image-ORB-feature-7-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
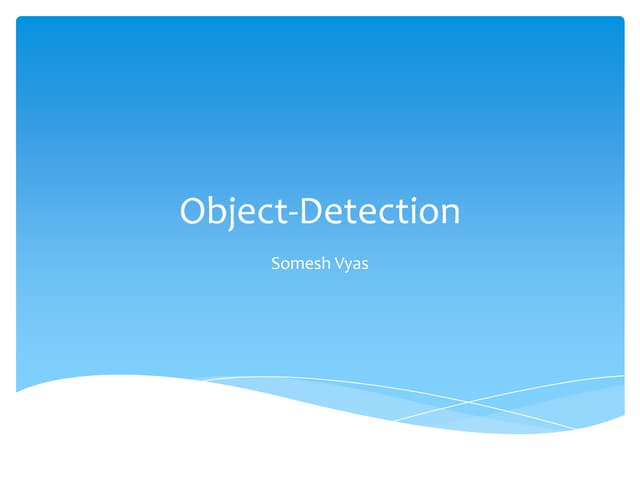
Separability of the Gaussian filter
s =
w∑
u=−w
w∑
v=−w
g(u) · g(v) =
( w∑
u=−w
g(u)
)
·
( w∑
v=−w
g(v)
)
= s′
· s′
Gn(u, v) =
1
s
· e− u2
2σ2
· e− v2
2σ2
=
1
s
· g(u) · g(v) =
g(u)
s′
·
g(v)
s′
Separable Kernel Matrix:
G(2w+1)×(2w+1) =
1
s
g(−w)g(−w) . . . g(−w)g(0) . . . g(−w)g(w)
...
...
...
g(0)g(−w) . . . g(0)g(0) . . . g(0)g(w)
...
...
...
g(w)g(−w) . . . g(w)g(0) . . . g(w)g(w)
=
1
s′
g(−w)
...
g(0)
...
g(w)
·
1
s′
[
g(−w) . . . g(0) . . . g(w)
]
高洪臣 ORB 特征 2020 年 7 月 10 日 9 / 12](https://image.slidesharecdn.com/orbfeaturetexbeamer-201206052845/75/Image-ORB-feature-9-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
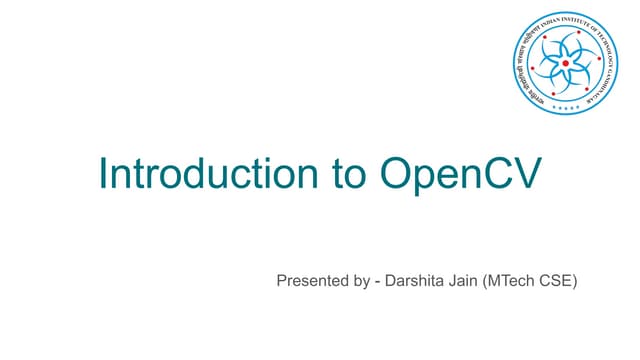
Separability of the Gaussian filter
Image Gaussian Filtering:
I′
(i, j) =
w∑
u=−w
w∑
v=−w
I(i + u, j + v)Gn(u, v)
=
w∑
u=−w
w∑
v=−w
I(i + u, j + v)
1
s
g(u)g(v)
=
w∑
u=−w
w∑
v=−w
I(i + u, j + v)
1
s′
g(u)
1
s′
g(v)
=
w∑
u=−w
[ w∑
v=−w
I(i + u, j + v)
g(v)
s′
]
g(u)
s′
=
w∑
u=−w
S(i + u)
g(u)
s′
• kernel size: (2w + 1) × (2w + 1), w = 3
1 int gaussKernel[4] = { 224, 192, 136, 72 };
高洪臣 ORB 特征 2020 年 7 月 10 日 10 / 12](https://image.slidesharecdn.com/orbfeaturetexbeamer-201206052845/75/Image-ORB-feature-10-2048.jpg)
![.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
rBRIEF
• construct a lookup table of precomputed BRIEF patterns
1 static int ORB_pattern[256*4] = {
2 8, -3, 9, 5,
3 4, 2, 7,-12,
4 -11, 9, -8, 2,
5 7,-12, 12,-13, // ...
6 }
• steered BRIEF, for each bit of the descriptor
p′
i = p + Rθ(pi − p)
q′
i = p + Rθ(qi − p)
, Rθ =
[
cos θ − sin θ
sin θ cos θ
]
τ(I; p′
i, q′
i) :=
{
1 : I(p′
i) I(q′
i)
0 : I(p′
i) ≥ I(q′
i)
1 float angle = (float)kpt.angle*factorPI;
2 float a = (float)cos(angle), b = (float)sin(angle);
3 #define GET_VALUE(idx)
4 center[cvRound(pattern[idx].x*b + pattern[idx].y*a)*step +
5 cvRound(pattern[idx].x*a - pattern[idx].y*b)]
高洪臣 ORB 特征 2020 年 7 月 10 日 12 / 12](https://image.slidesharecdn.com/orbfeaturetexbeamer-201206052845/75/Image-ORB-feature-12-2048.jpg)












































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)







