Download as PDF, PPTX
![Haptics
Symposium
2014
Haptics
Symposium
2014
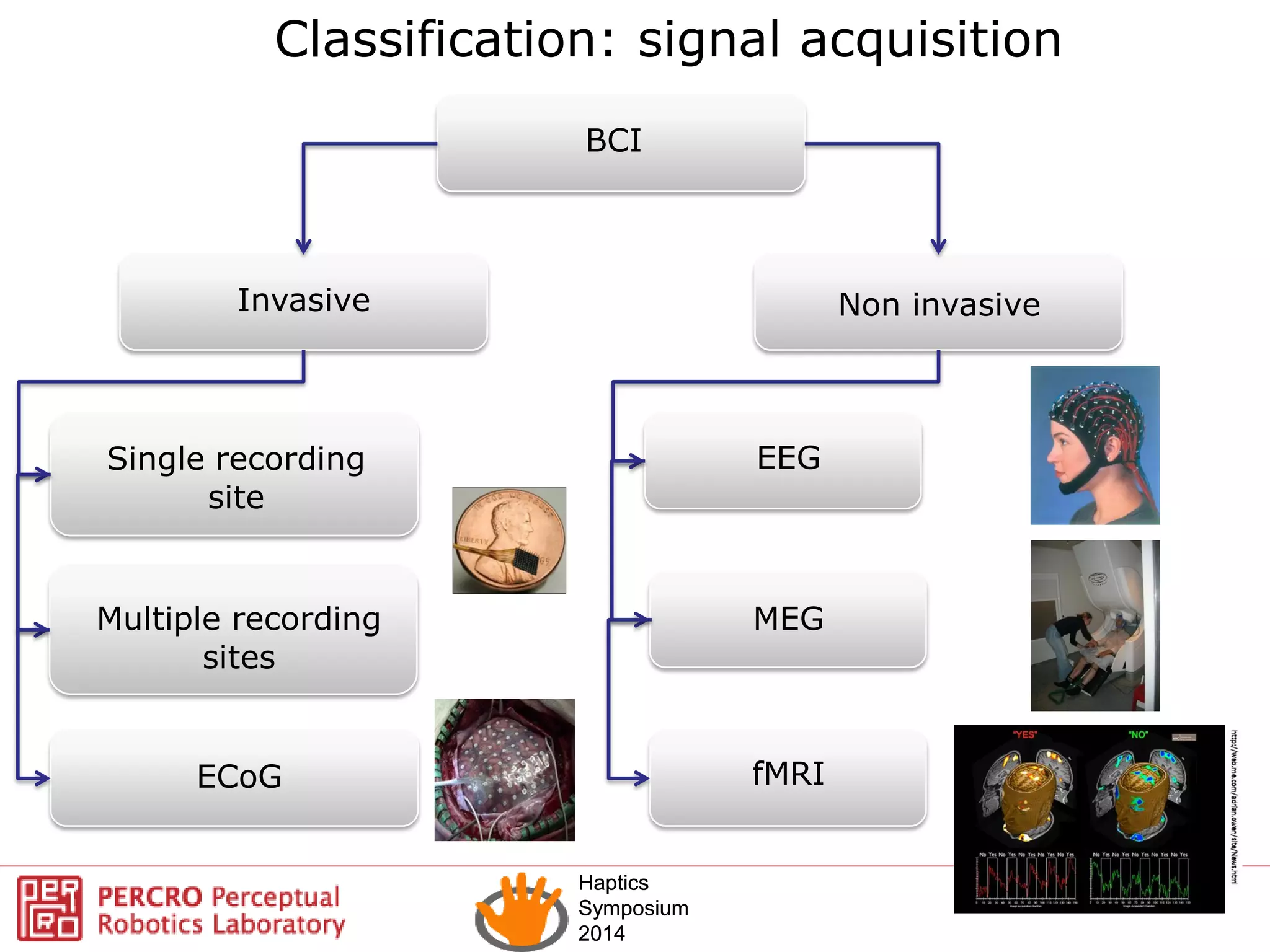
ACQUIRING BRAIN ACTIVITY
Temporal Resolution [s]
SpatialResolution[cm]
BASED ON THE
BLOOD FLOW
VARIATION
BASED ON THE
MAGNETIC-
ELECTRICAL
ACTIVITY](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-4-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
ACQUIRING BRAIN ACTIVITY
Temporal Resolution [s]
SpatialResolution[cm]
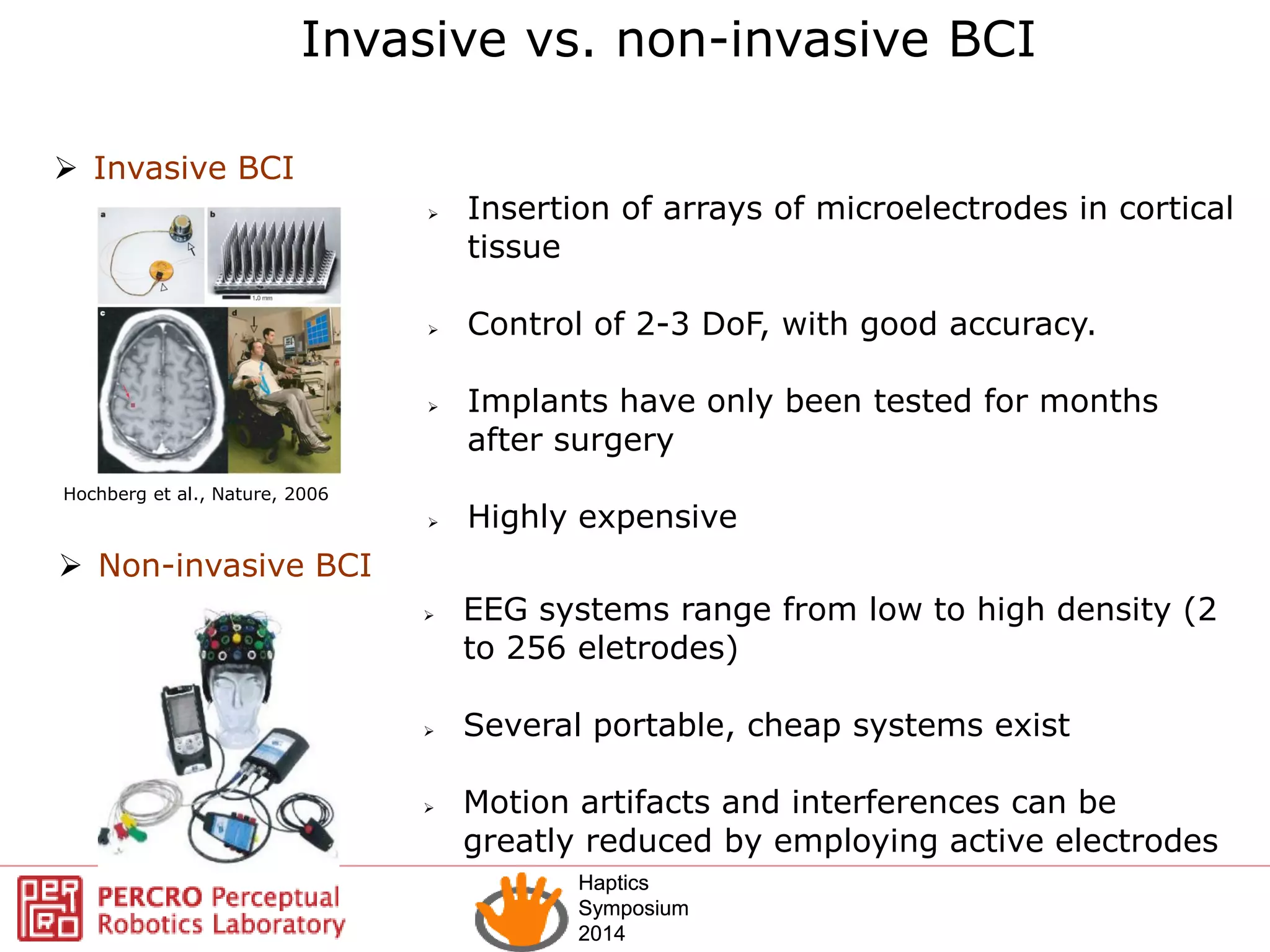
ElectroCorticoGraphy
(ECoG)
Very good spatial and
temporal resolution (firing
of a single neuron)
INVASIVE
Surgical intervention](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-5-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
ACQUIRING BRAIN ACTIVITY
Temporal Resolution [s]
SpatialResolution[cm]
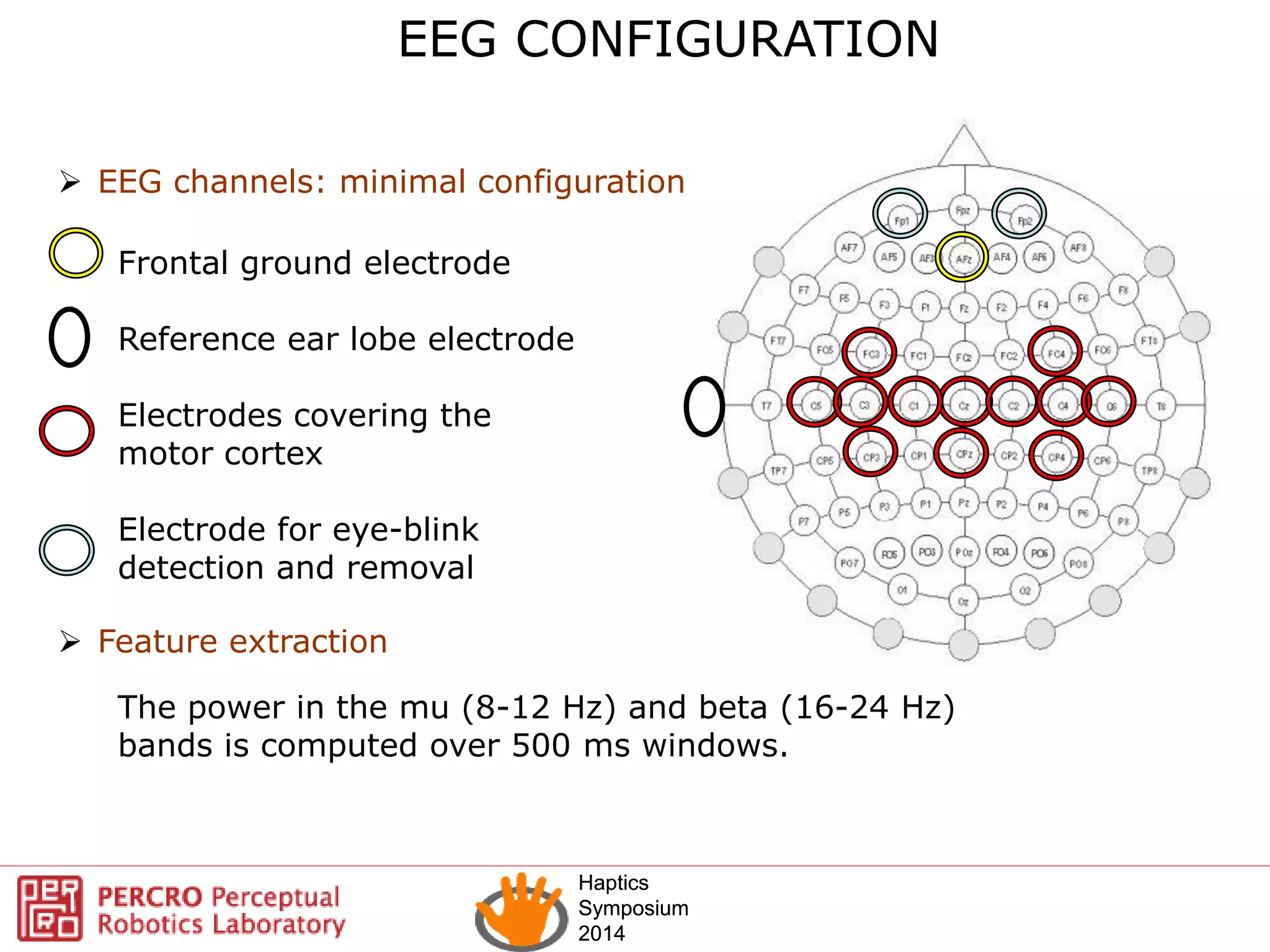
• Most widely used
strategy for BCI
applications
• Good Temporal
Resolution
• Several portable,
cheap systems exist
•Motion artifacts and
interferences can be greatly
reduced by employing active
electrodes
EEG is the record of
electrical activity of brain by
placing the electrodes on
the scalp.](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-6-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
NATURAL EEG RHITMIC ACTIVITY
Band [Hz] Normaly Location
Gamma 32 + Displays during cross-modal sensory
processing and short-term memory
Somatosensory cortex
Beta 16 -
32
active thinking, focus, hi alert,
anxious
both sides, symmetrical
distribution, most evident
frontally; low-amplitude waves
Alpha 8 -
16
relaxed/reflecting
closing the eyes
inhibition control
posterior regions of head, both
sides, higher in amplitude on
non-dominant side.
Mu 8 -
12
Shows rest-state motor neurons Sensorimotor cortex
Theta 4 - 8 higher in young children
drowsiness in adults and teens
idling
Found in locations not related to
task at hand
Delta up to
4
adult slow-wave sleep
Has been found during some
continuous-attention tasks
frontally in adults, posteriorly in
children; high-amplitude waves](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-8-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
NATURAL EEG RHITMIC ACTIVITY
Band [Hz] Normaly Location
Gamma 32 + Displays during cross-modal sensory
processing and short-term memory
Somatosensory cortex
Beta 16 -
32
active thinking, focus, hi alert,
anxious
both sides, symmetrical
distribution, most evident
frontally; low-amplitude waves
Alpha 8 -
16
relaxed/reflecting
closing the eyes
inhibition control
posterior regions of head, both
sides, higher in amplitude on
non-dominant side.
Mu 8 -
12
Shows rest-state motor neurons Sensorimotor cortex
Theta 4 - 8 higher in young children
drowsiness in adults and teens
idling
Found in locations not related to
task at hand
Delta up to
4
adult slow-wave sleep
Has been found during some
continuous-attention tasks
frontally in adults, posteriorly in
children; high-amplitude waves](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-9-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
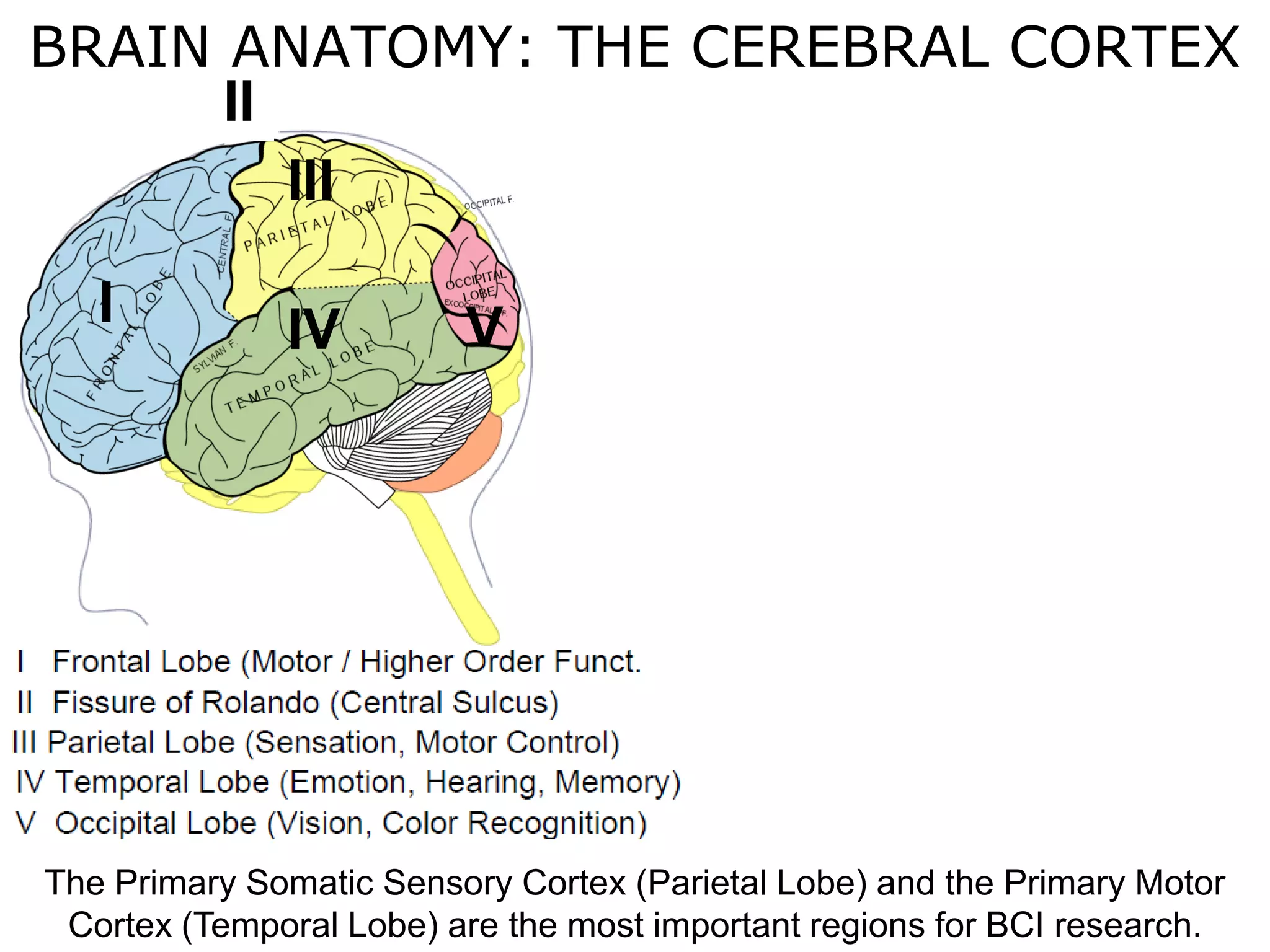
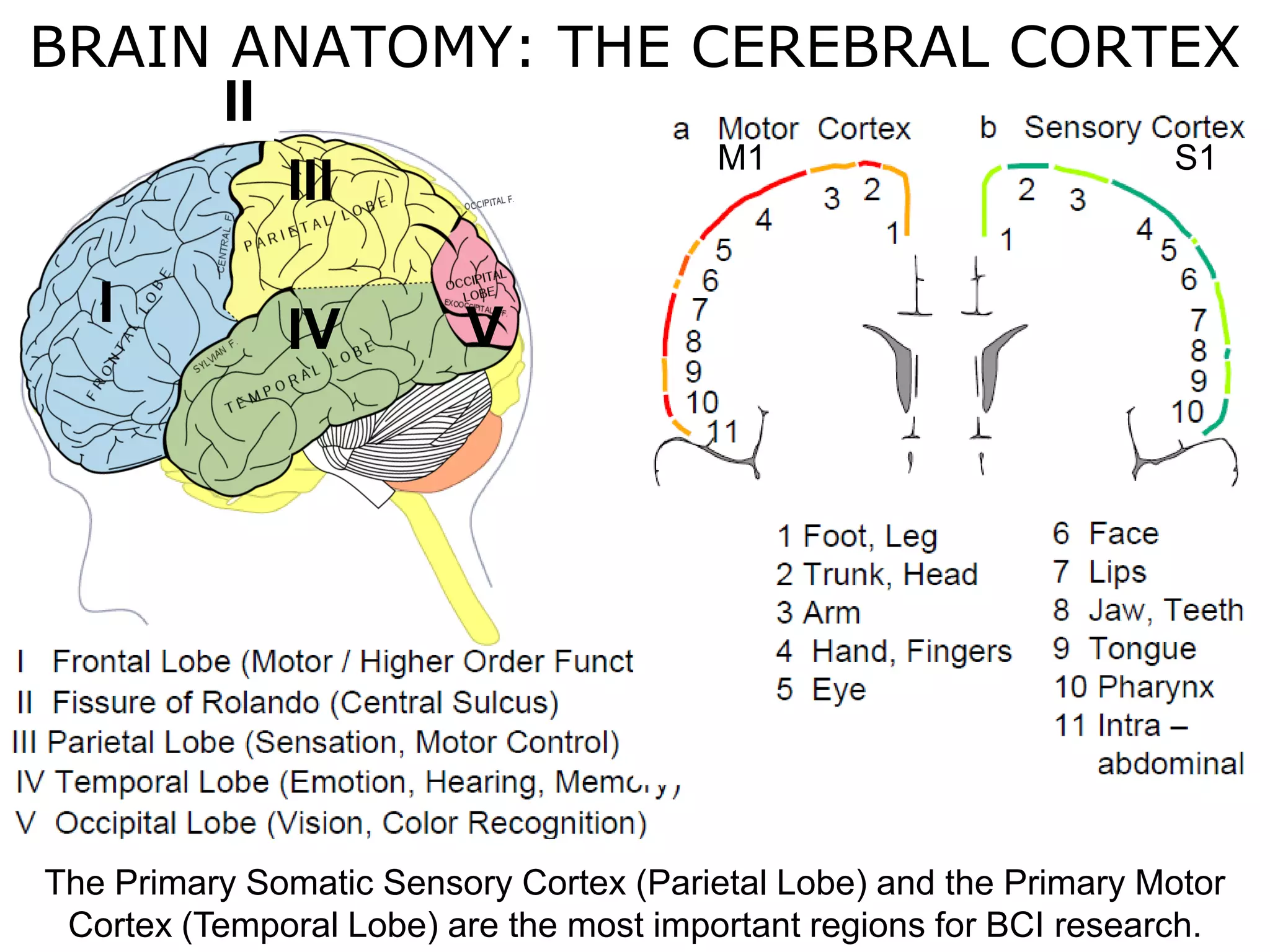
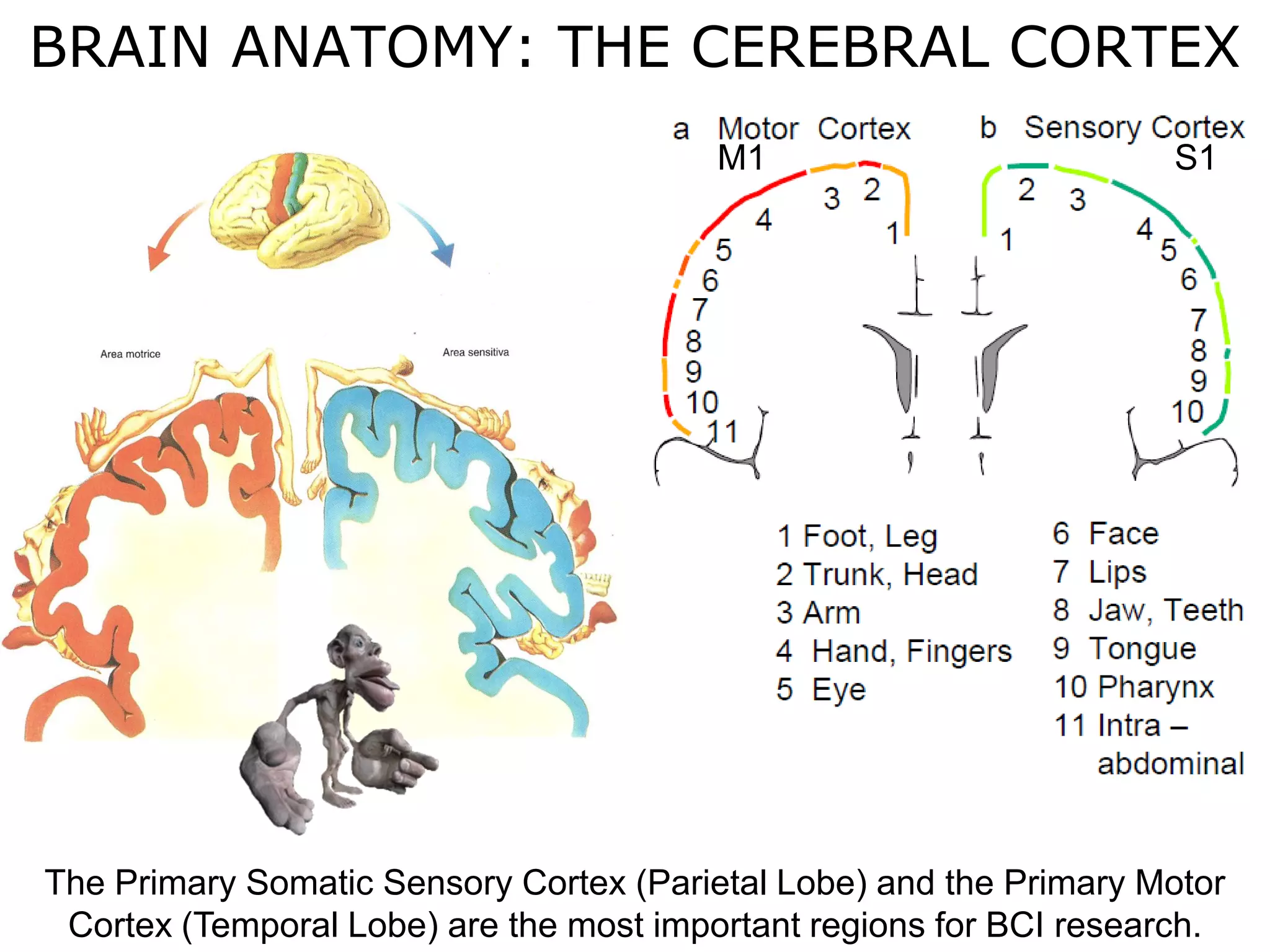
BRAIN ANATOMY
[Martini, 2006]](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-21-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
time
Frequency[Hz]
epochtimechannel
X epochfrequencytimechannel
X
AVERAGING
time
Amplitude[µV]
ERP ERSP
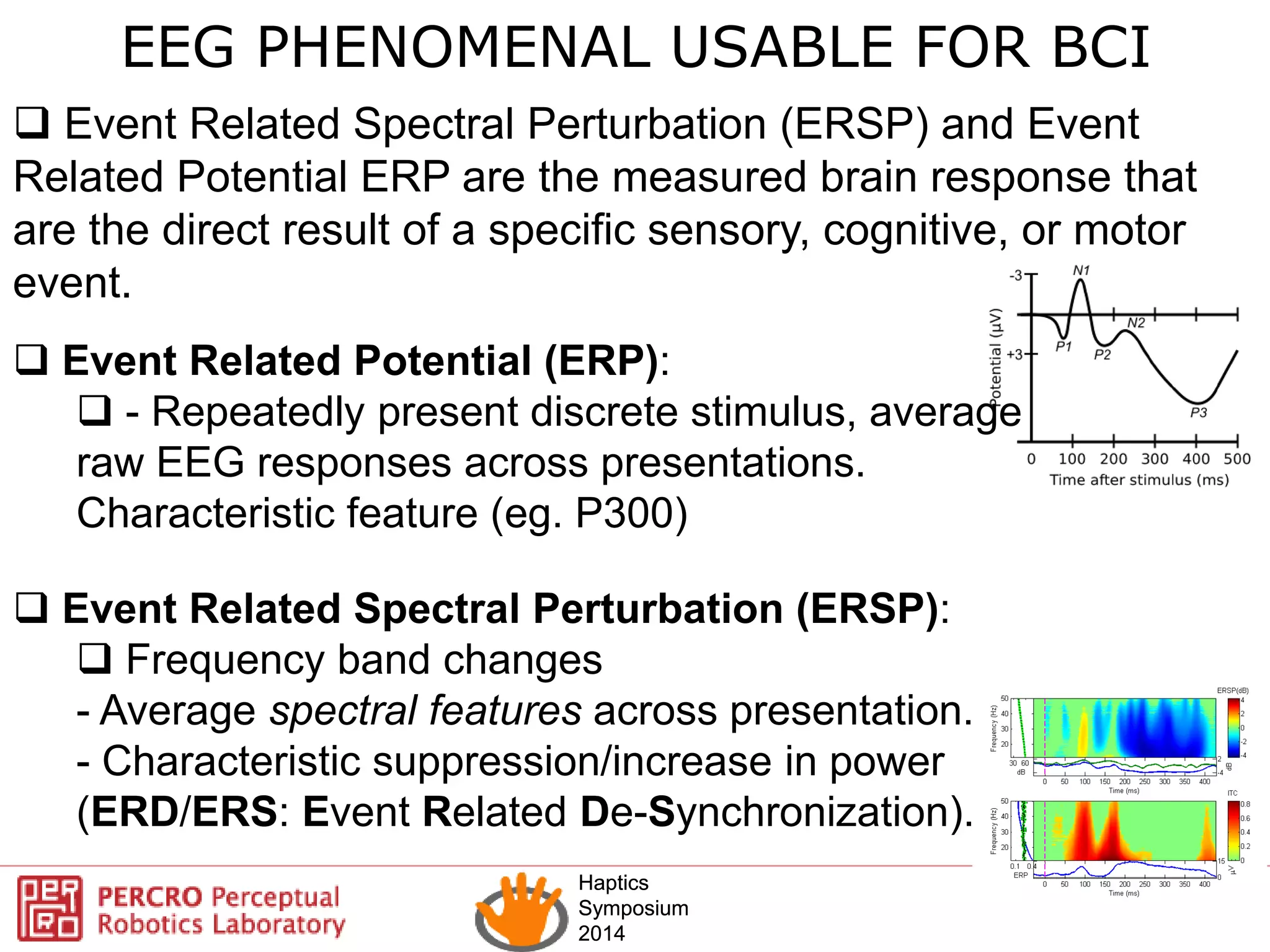
• The ERPs and ERSP should be extracted from the background
noise mediating many recordings (Epochs or Trials)](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-31-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
Amplitude[µV]
EEG background
noise ~ 1/sqrt(N)
Costant Signal ERP
Repetition (N)
Post-Stimulus
EEG
Costant
Signal
Background
Noise
average
ERP
average
Signal
average
Noise
AVERAGING THEORY
S/N ratio increases as a
function of the square root of
the number of trials.](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-32-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
SLOW CORTICAL POTENTIALS [Kornhuber and Deecke (1965) ]
• Know as BereitschaftPotential
(readiness potential) or Movement
Related Cortical Potentials (MRCPs).
• Slow oscillations preceding the
movement
• Localized over the supplementary
motor area (SMA)
• Steps for MRCP detection
• Spatial filter,
• LP frequency filter
• Template extraction from the
training data
• matching with the ongoing eeg
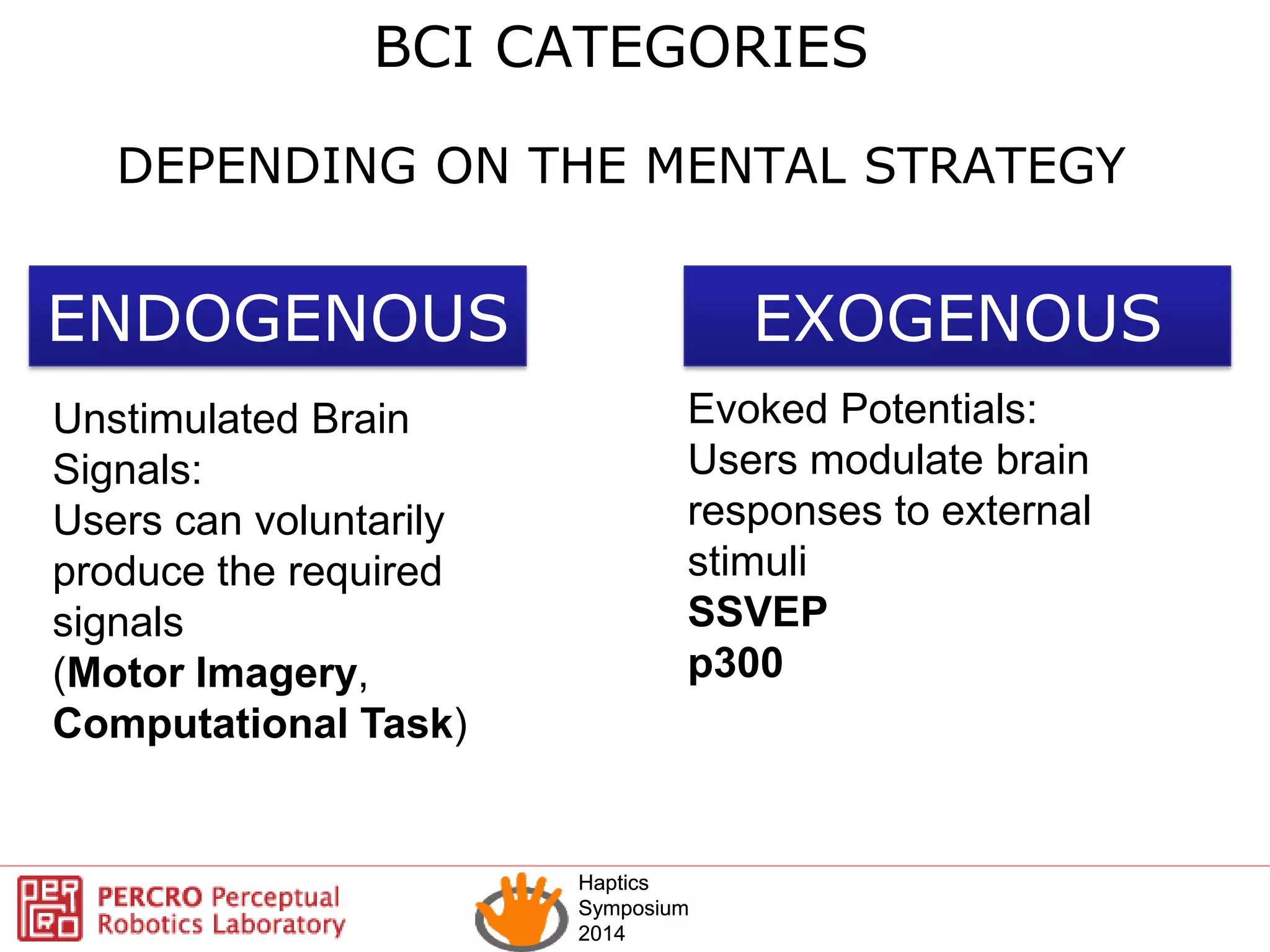
MOTOR IMAGERY CORRELATES IN EEG
•Frequency close to the DC -> very
challenging to detect in single trial](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-34-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
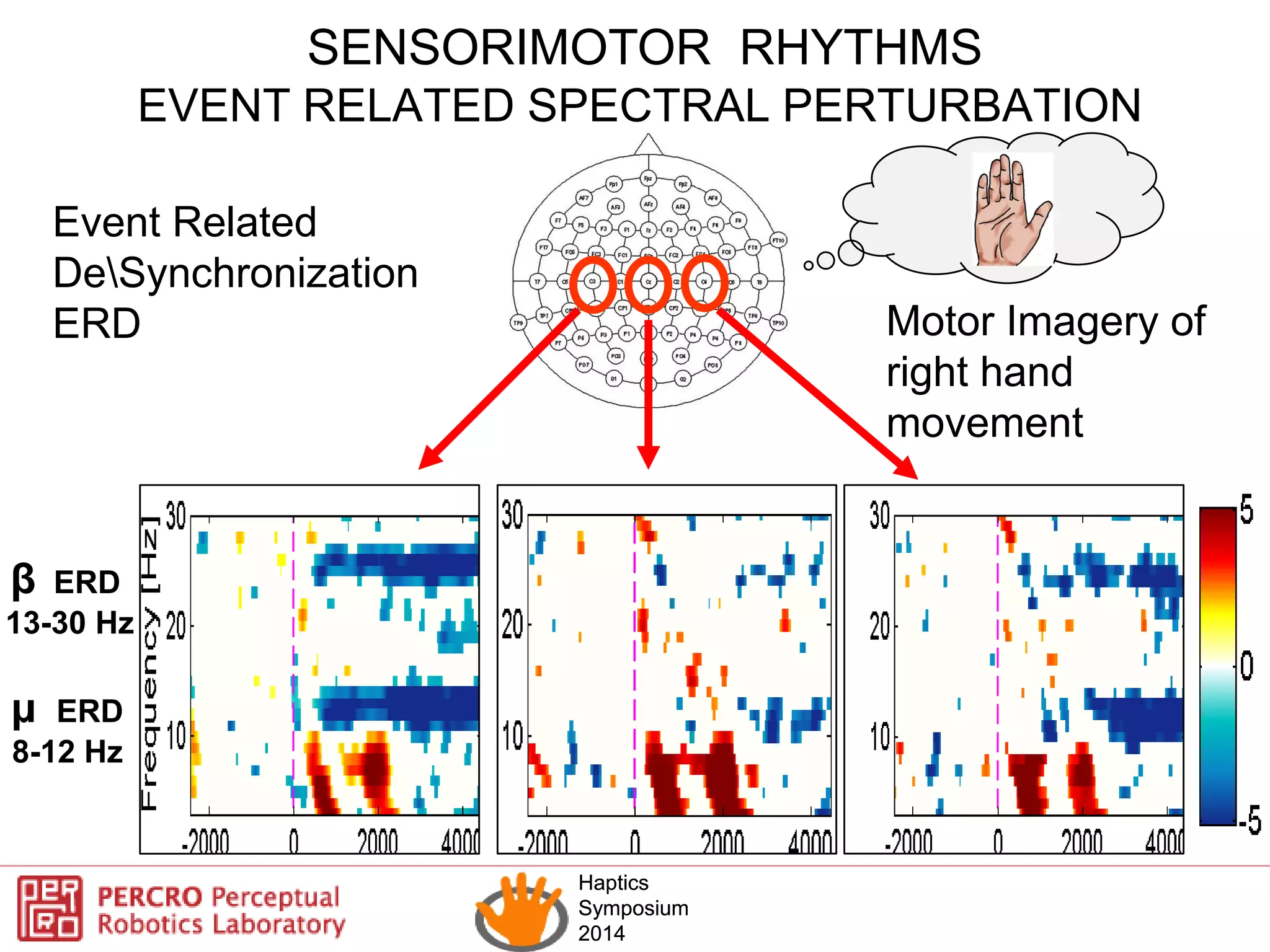
SENSORIMOTOR RHYTHMS [Pfurtscheller and Lopes da Silva, (1999)]
• the power in μ (8-12 Hz) and β (12-24
Hz) EEG rhythms are affected by motor
imagery.
•Know also as Event Related
De/Synchronization (ERD,ERS)
•Steps for MRCP detection
• Spatial filter,
• Band Pass frequency filter
• Feature extraction
• LDA classifier
• High average classification
accuracy (>80%)
MOTOR IMAGERY CORRELATES IN EEG](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-35-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
ERD extraction: example with motor imagery
Collecting Trials
from a specific
electrode
Bandpass on the
specific frequency
Squaring Signals
Averaging over
Trials
Smoothing
[Pfurtscheller and Lopes da Silva, (1999)]](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-36-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
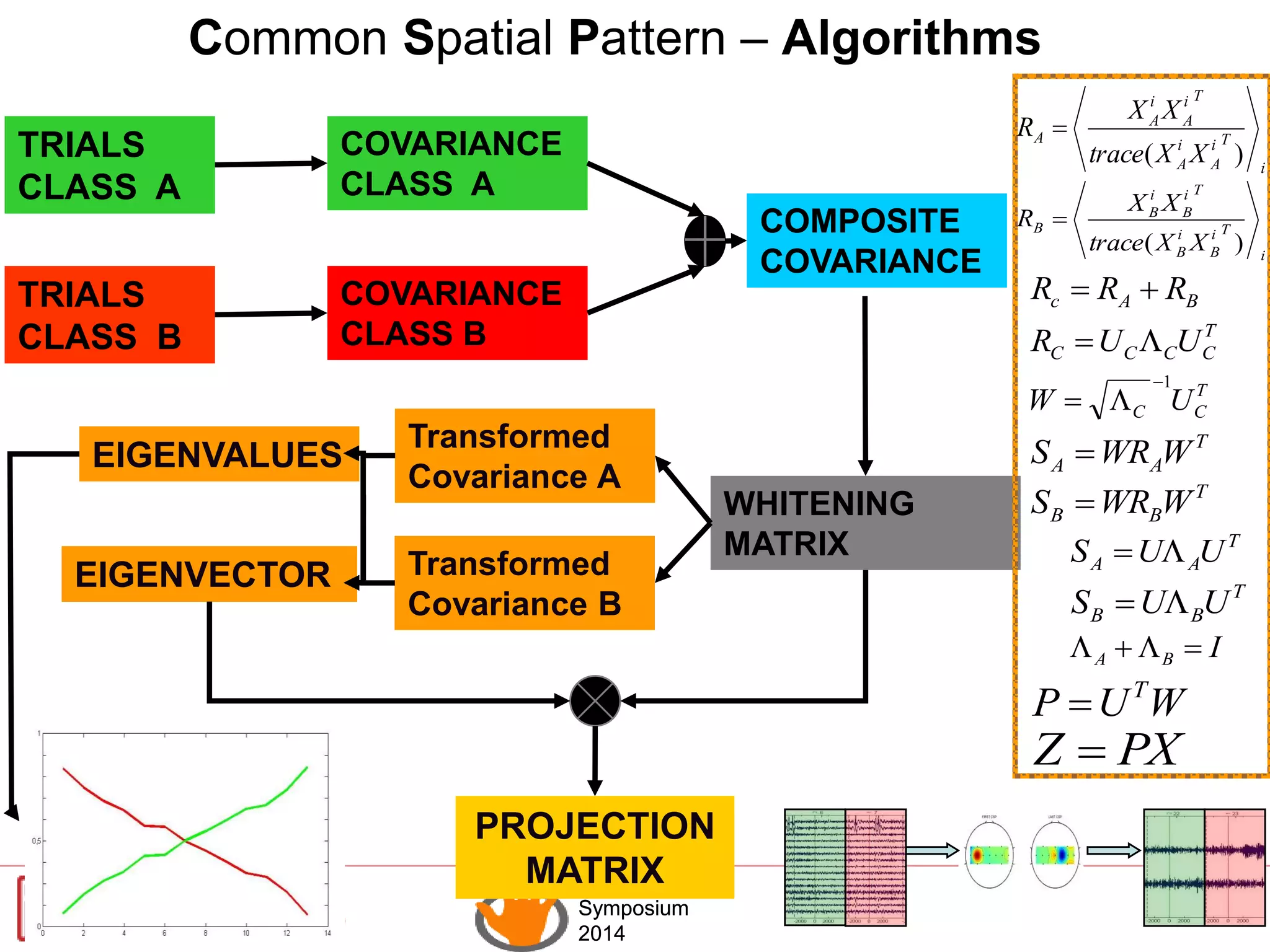
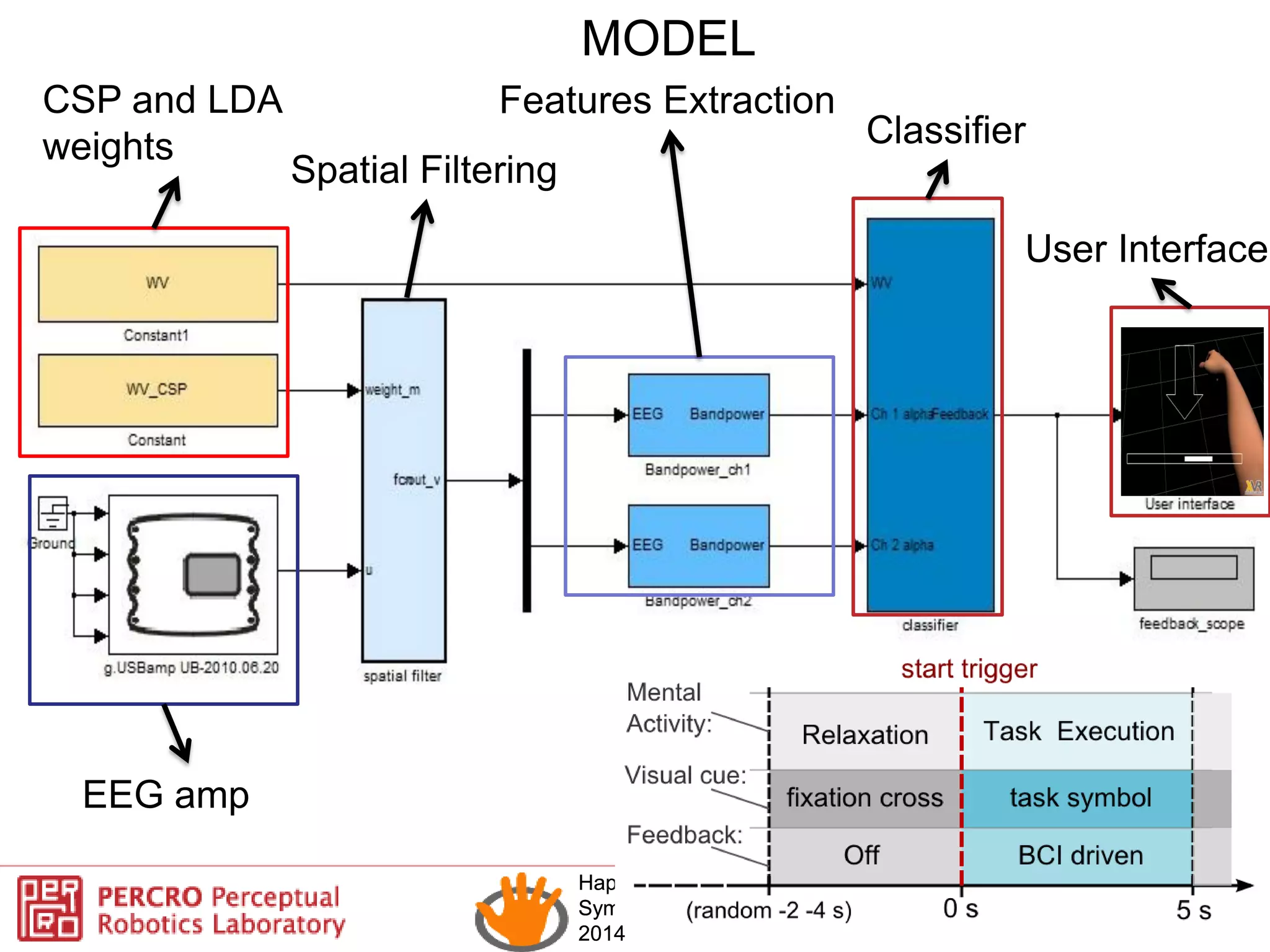
Optimized Spatial filter: Common Spatial Pattern – CSP
VAR MAX VAR MIN
VAR MIN
RAW
CHANNELS
FIRST AND LAST
CSP FILTER
PROJECTED
DATA
REST MOVERESTMOVE
Trial i Trial i+1 Trial i Trial i+1
VAR MAX
[Pfurtscheller 1999]
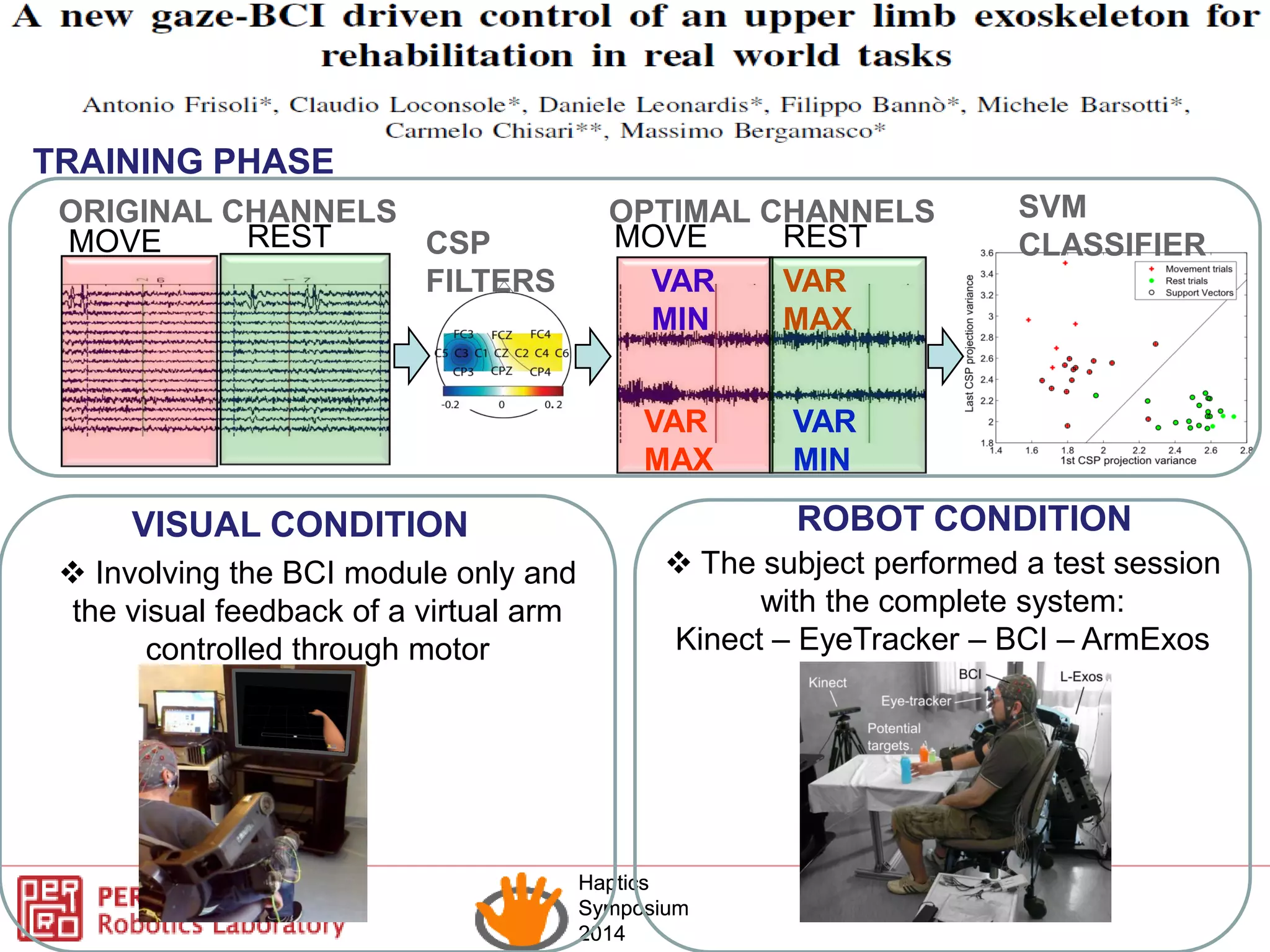
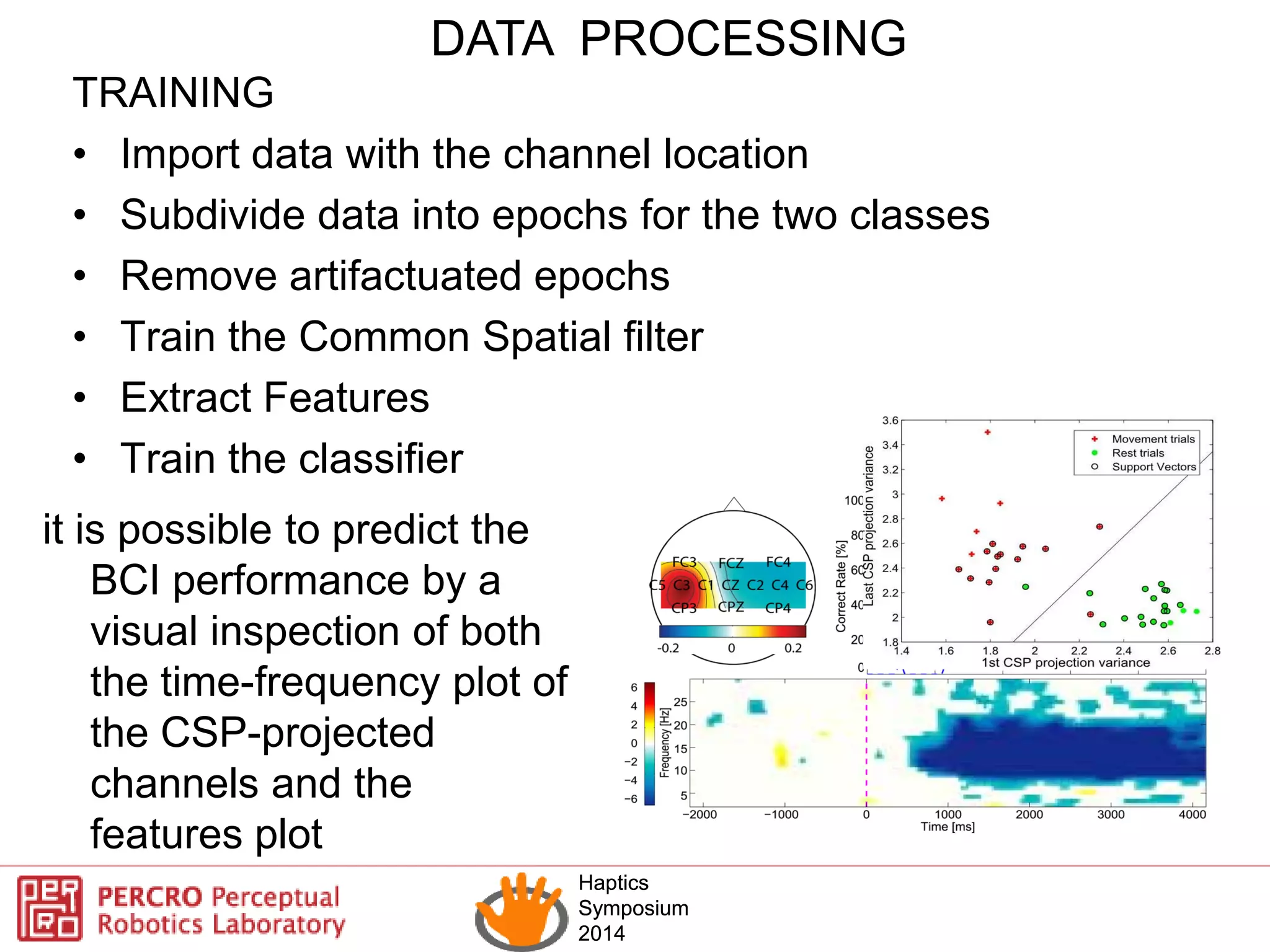
Common Spatial Pattern (CSP) is a supervised spatial filtering
method for two-class discrimination problems, which finds
directions that maximize variance for one class and at the same
time minimize variance for the other class.
1 CSP
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4
-0.2 -0.1 0 -0.2 -0.1 0
CSP
13 CSP
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4
1 CSP
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4
-0.2 -0.1 0 -0.2 -0.1 0
CSP
13 CSP
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-40-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
Time Frequency plot raw channels
Time [ms]
Frequency[Hz]
C3
-2000 0 2000 4000
10
20
30
-2
0
2
Time [ms]
Frequency[Hz]
CZ
-2000 0 2000 4000
10
20
30
-2
0
2
-2
0
2
CHANNELS ERD MAPS - MOVE
Time [ms]
Frequency[Hz]
C4
-2000 0 2000 4000
10
20
30
Time [ms]
Frequency[Hz]
C3
-2000 0 2000 4000
10
20
30
-2
-1
0
1
2
Time [ms]
Frequency[Hz]
CZ
-2000 0 2000 4000
10
20
30
-2
-1
0
1
2
-2
-1
0
1
2
CHANNELS ERD MAPS - REST
Time [ms]
Frequency[Hz]
C4
-2000 0 2000 4000
10
20
30
Click on electrodes to toggle name/number
Click on electrodes to toggle name/number
Click on electrodes to toggle name/number](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-61-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
Time Frequency plot CSP projected channels
Time [ms]
Frequency[Hz]
MOVE - First CSP
-2000 -1000 0 1000 2000 3000 4000
10
20
30
-5
0
5
Time [ms]
Frequency[Hz]
MOVE - Last CSP
-2000 -1000 0 1000 2000 3000 4000
10
20
30
-2
0
2
Time [ms]
Frequency[Hz]
REST - First CSP
-2000 -1000 0 1000 2000 3000 4000
10
20
30
-2
0
2
-2
0
2
Time [ms]
Frequency[Hz]
REST - Last CSP
-2000 -1000 0 1000 2000 3000 4000
10
20
30
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4
FC3 FCZ FC4
C5 C3 C1 CZ C2 C4 C6
CP3 CPZ CP4
First CSP
First CSP
Last CSP
Last CSP
REST trials
MOVE trials](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-62-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
0 1000 2000 3000
0
20
40
60
80
100
Time [ms]
CorrectRate[%]
CLASSIFIER PERFORMANCE
'Rest' ->89.65%
'Move'->99.95%
'Total' ->95.10%
1.8 2 2.2 2.4 2.6
2
2.5
3
3.5
1st CSP - Log Features
2ndCSP-LogFeatures
0
1
Support Vectors
PREDICTING RESULTS
Analysis of the BCI
output calculated with
parameters extracted
from the same dataset
Plot of each trial in
the features
space](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-63-2048.jpg)
![Haptics
Symposium
2014
Haptics
Symposium
2014
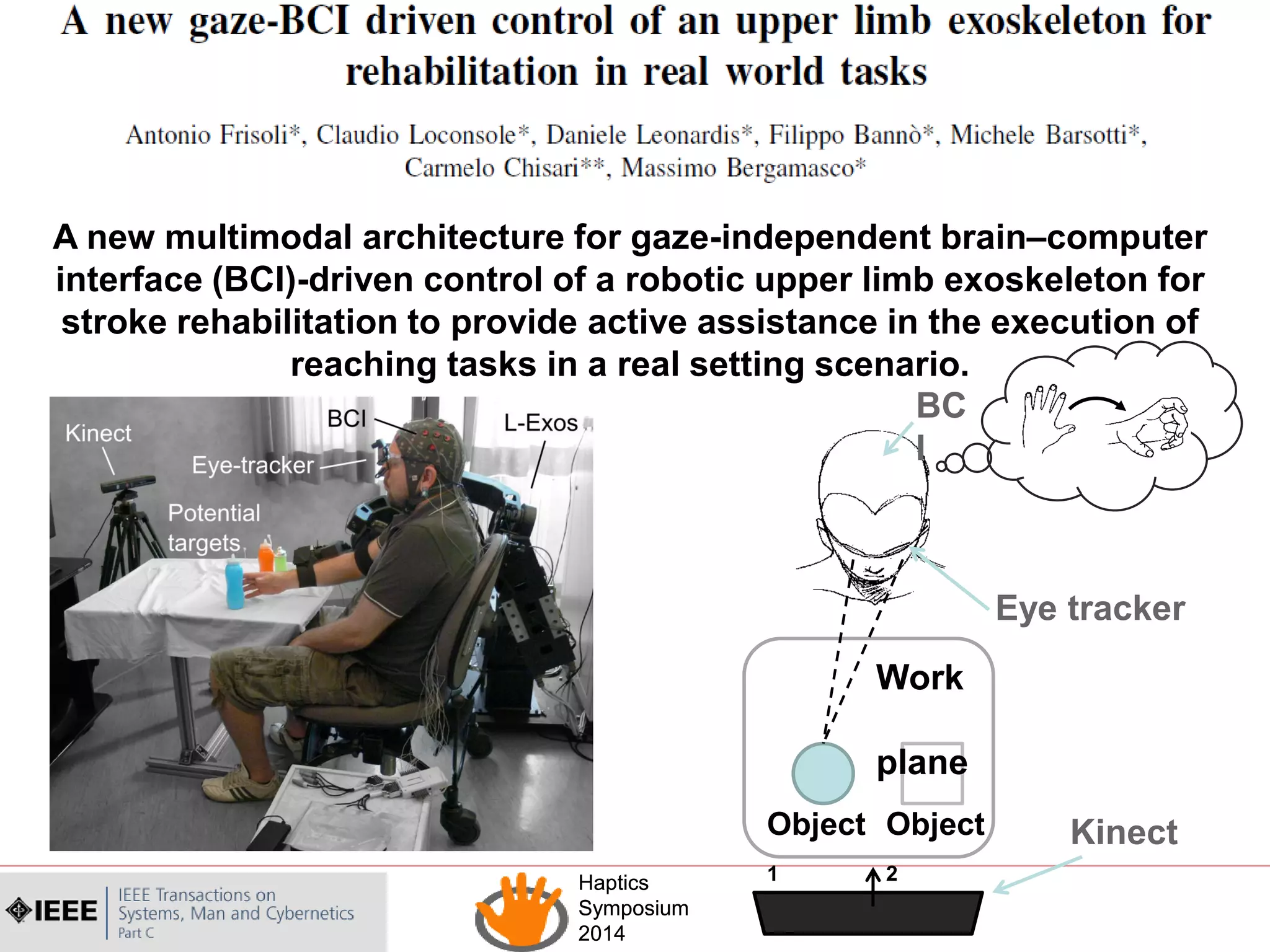
SHOWING RESULTs
[Frisoli et al. 2012]](https://image.slidesharecdn.com/hs2014bcimi-140408035214-phpapp02/75/Hs2014-bci-mi-65-2048.jpg)

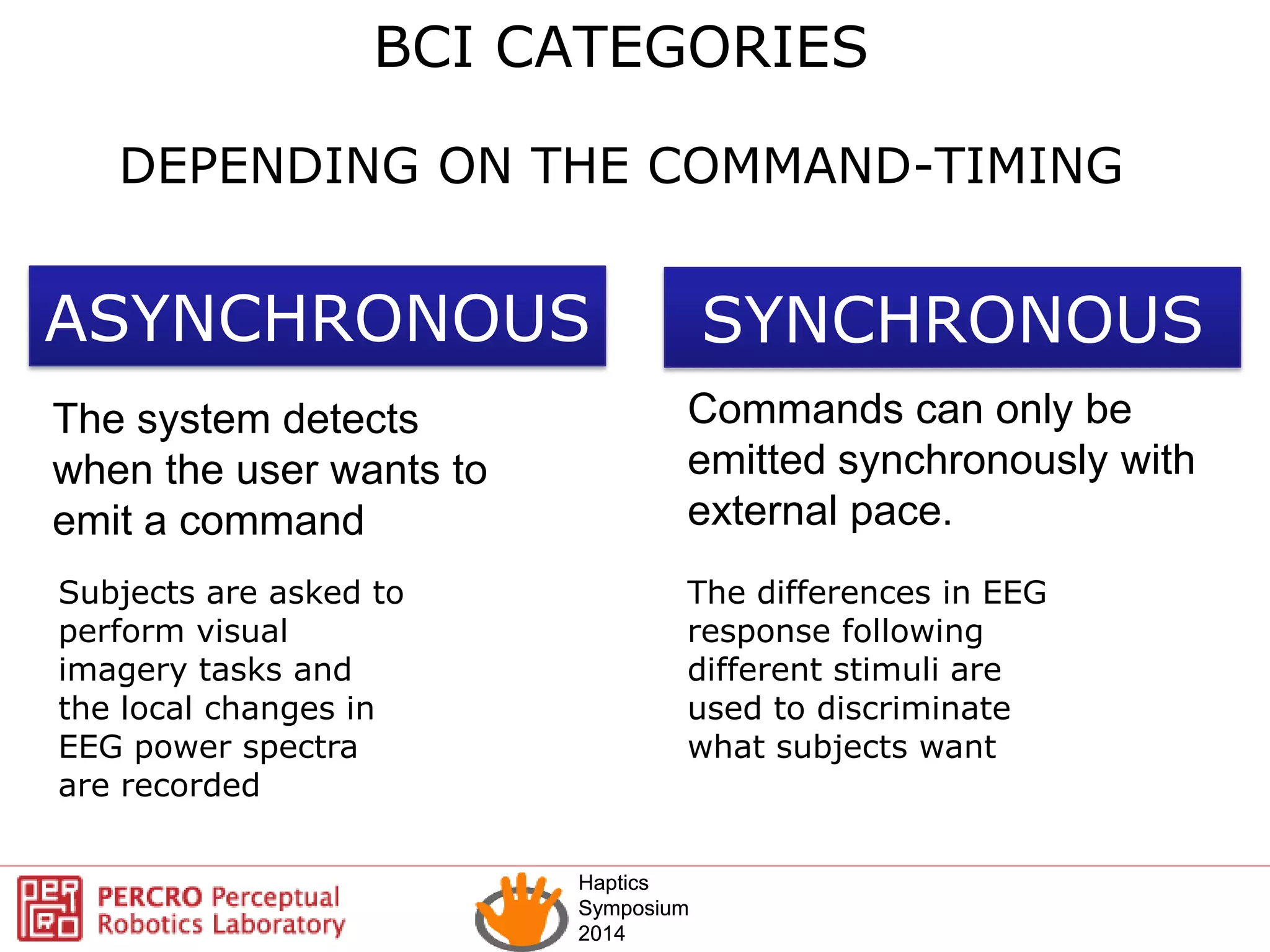
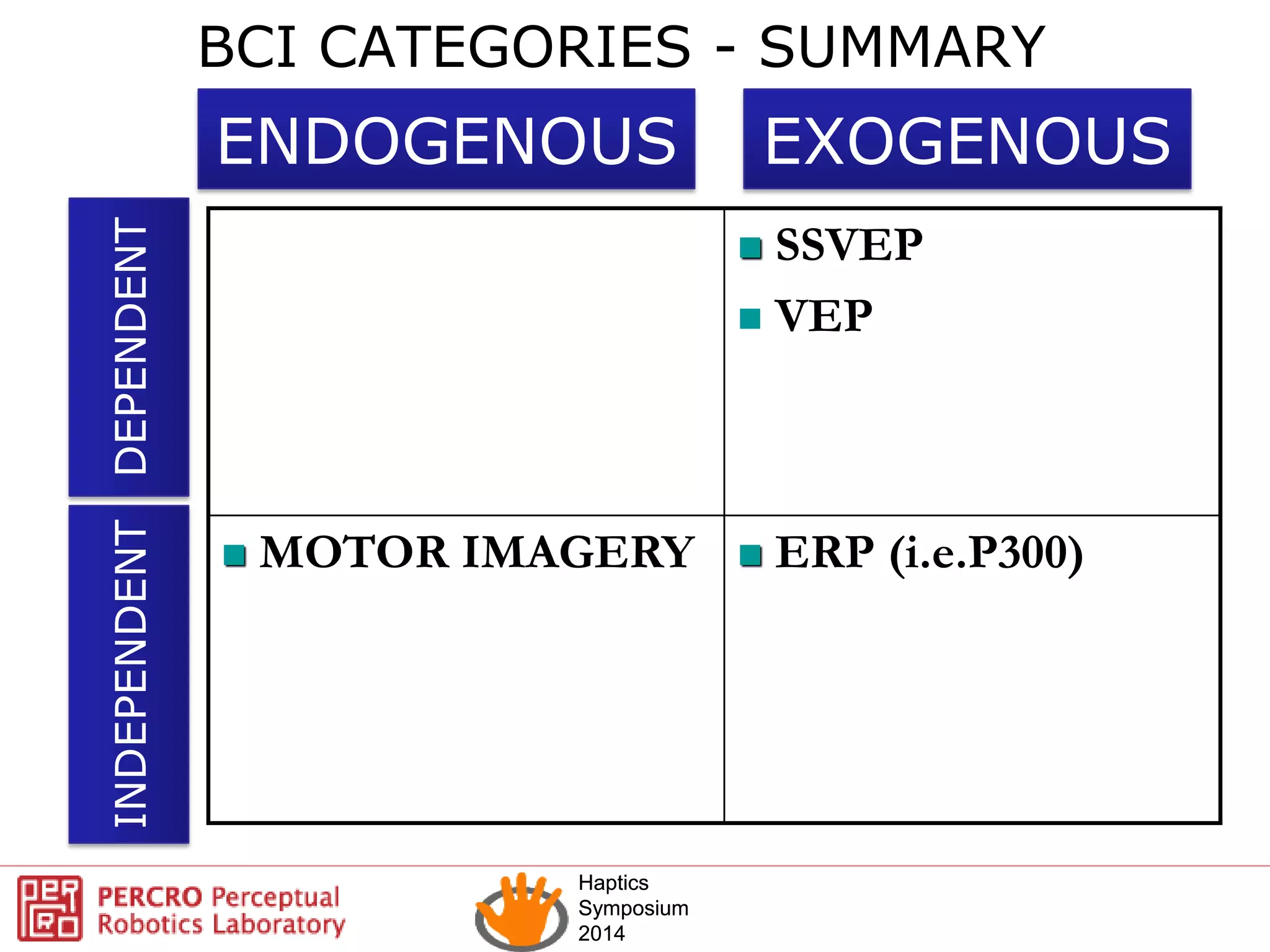
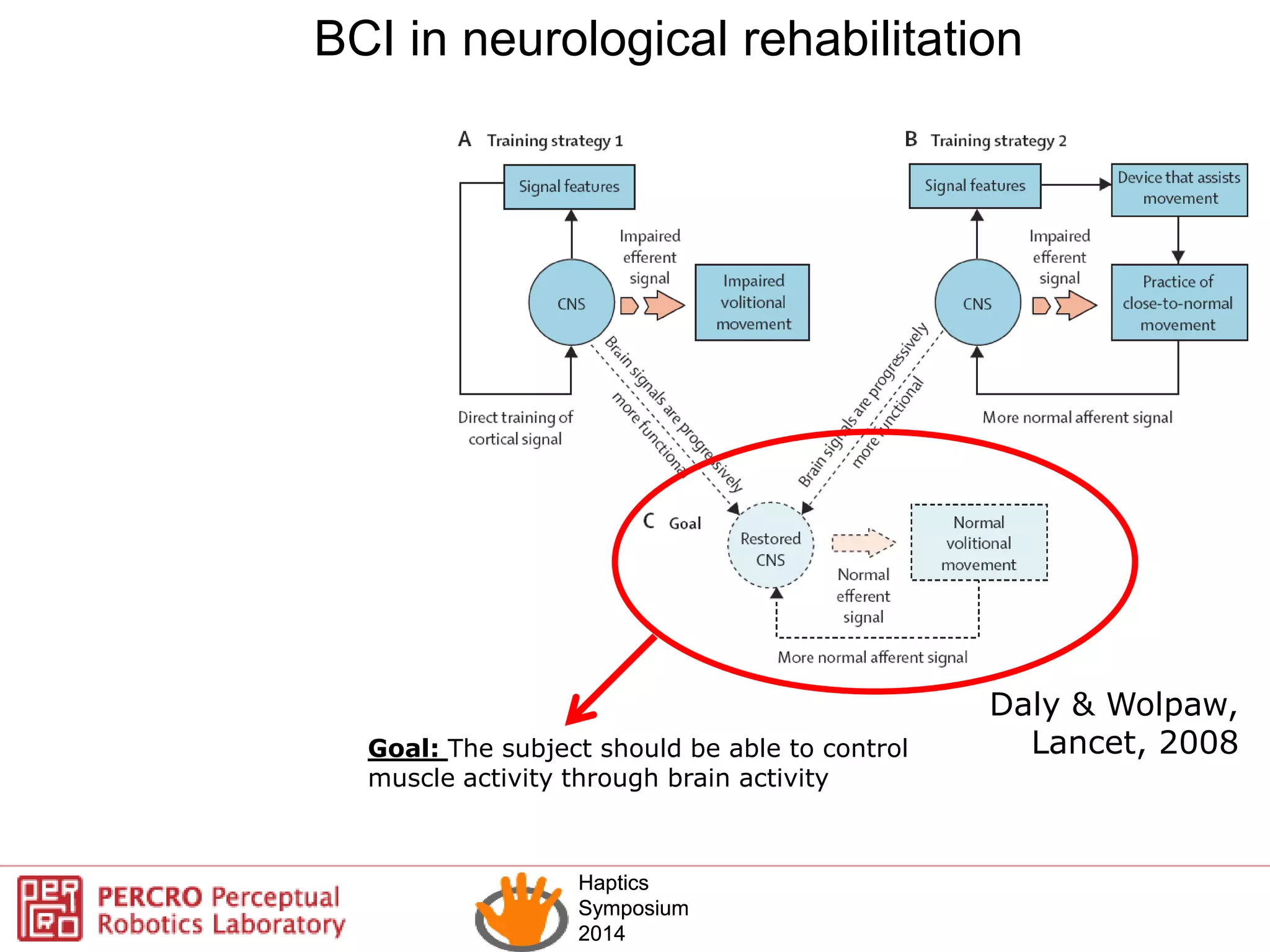
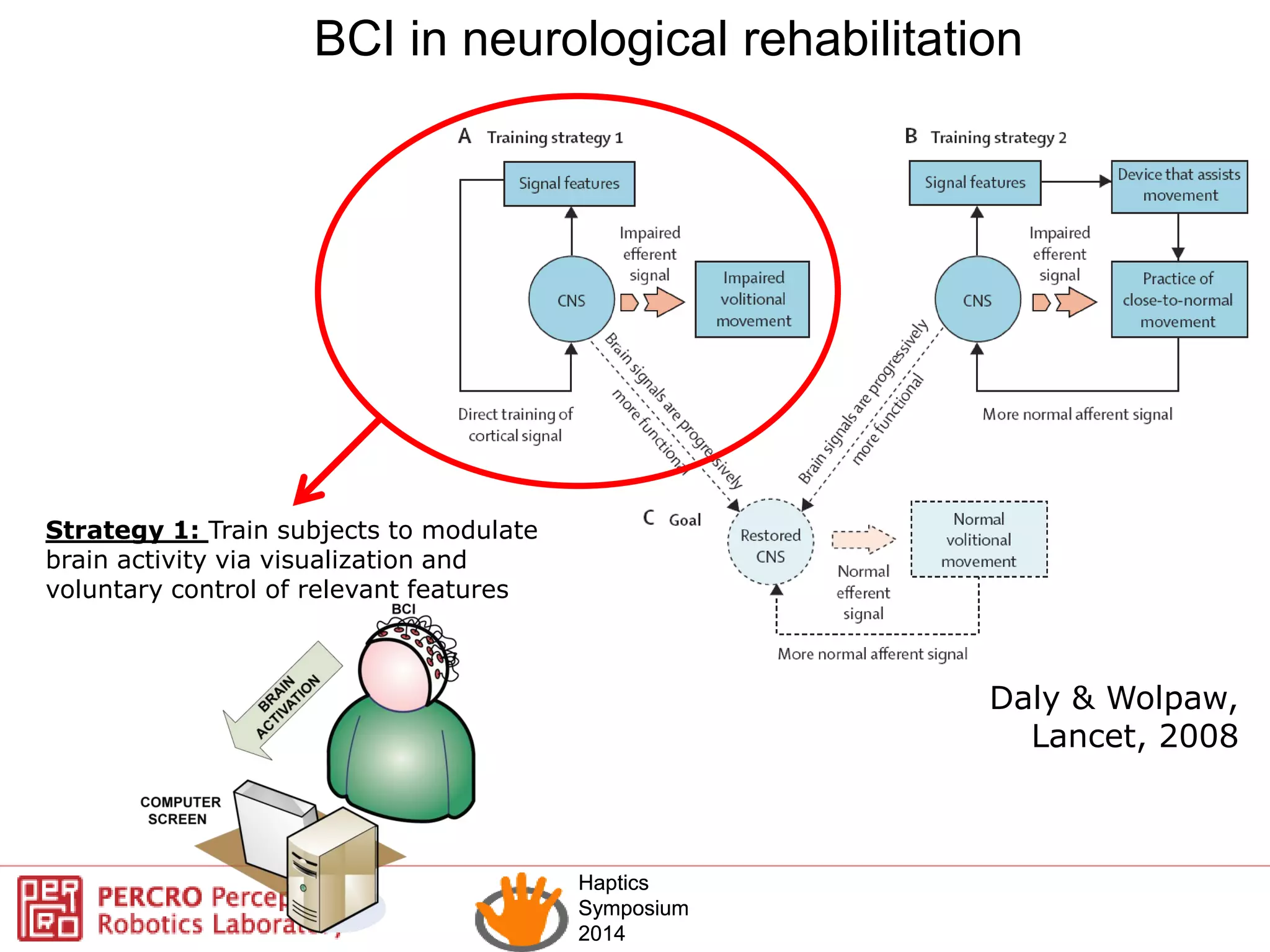
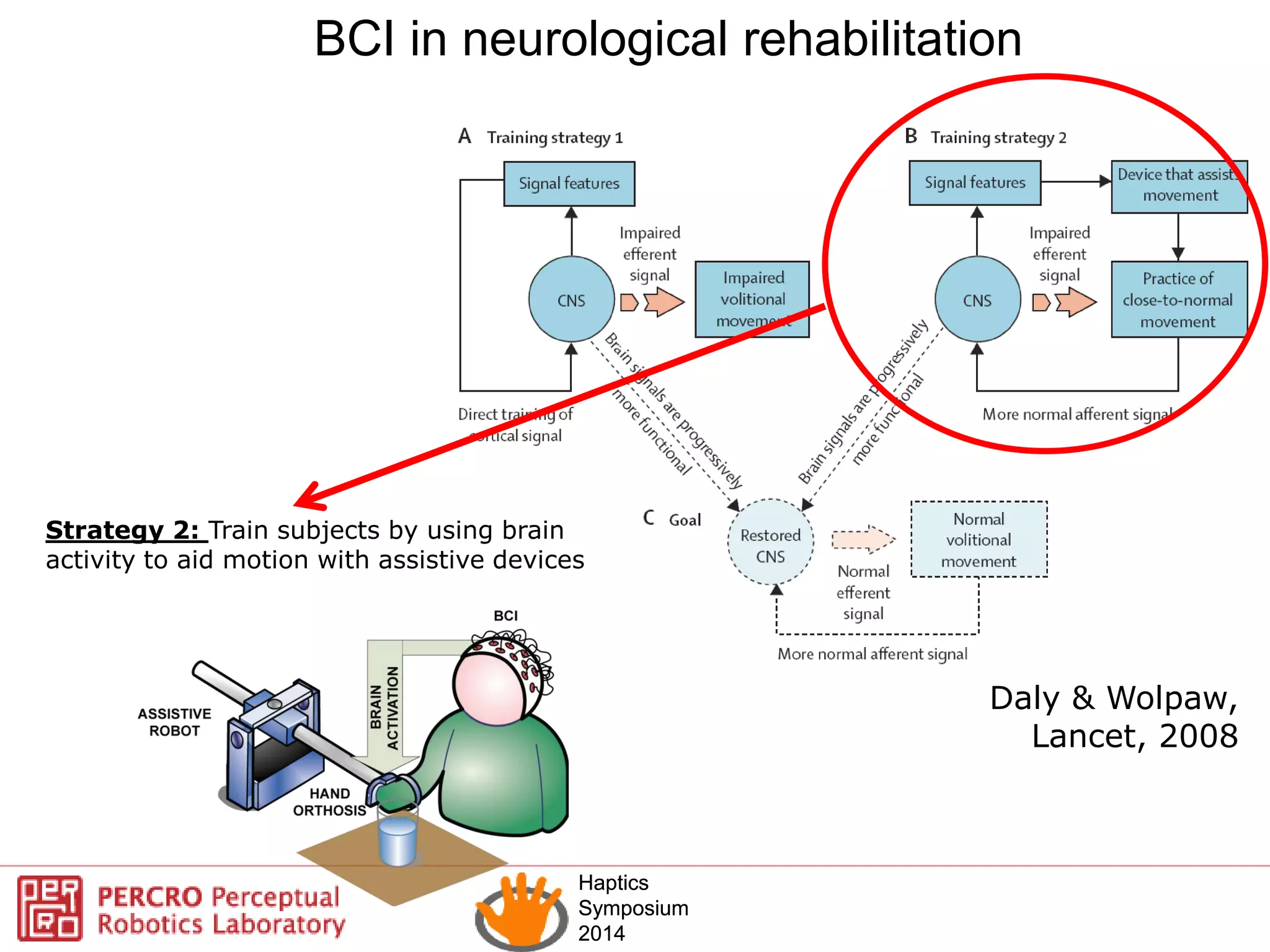
The document outlines a presentation on using brain-computer interfaces (BCIs) for upper limb neurorehabilitation. It discusses acquiring brain activity signals using electroencephalography (EEG), features of EEG signals, brain anatomy related to movement, motor imagery as a mental strategy for BCIs, and decoding movement intentions from EEG data analysis of event-related potentials and spectral perturbations. The goal is to control an exoskeleton through motor imagery-based BCI for rehabilitation applications.























































































