Downloaded 150 times

![11/23/2009
3
Scuola Superiore Sant’Anna
CyberHand: A neuro-controlled Hand
1. Low-Level Control
2. Feedback Delivery
Allow natural control;
Bidirectional;
Large bandwidth;
Efference
Afference
Neural Interface: Position, Touch, Pressure
Non-Invasive Interface: Touch, Temperature, Pressure.
Contact: Christian Cipriani, email: christian@arts.sssup.it
- 16 DoF
- 4 Motors
- 40 Sensors
SmartHand Prototype (2009)
2009 Clinical evaluation @:
-Lund University, Sweden;
-Johns Hopkins University, USA;
-Aalborg University, Denmark.
[1] G. S. Dhillon and K. W. Horch, “Direct Neural Sensory Feedback and Control of a Prosthetic Arm,” IEEE TNSRE, vol. 13, no.4, pp. 468-472, Dec. 2005.
[2] T. A. Kuiken, P. D. Marasco, B. A. Lock, R. N. Harden and J. P. A. Dewald, “Redirection of cutaneous sensation from the hand to the chest skin of human
amputees with targeted reinnervation,” PNAS, vol. 104, no. 50, pp. 20061-20066, 2007.](https://image.slidesharecdn.com/biorobotics-101102075635-phpapp02/75/Biorobotics-3-2048.jpg)
![11/23/2009
4
Brain Computer Interface as a tool for
neurological rehabilitation and prosthetics
[1] Eric C. Leuthardt, M.D., Gerwin Schalk, M.S., Daniel Moran, Ph.D., Jeffrey G. Ojemann, M.D., “THE EMERGING WORLD OF MOTOR NEUROPROSTHETICS: A NEUROSURGICAL
PERSPECTIVE”, Review, Neurosurgery 59:1-14, 2006
• implement strategies to control
“smarthand”
• implement methods to apply
in stroke rehab
Contact person: Maria Laura Blefari (m.blefari@sssup.it)
To analyze and understand the workingTo analyze and understand the working
principles ofprinciples of the natural sense of touchthe natural sense of touch
ToTo taketake inspirationinspiration fromfrom thisthis
knowledgeknowledge toto designdesign novelnovel andand betterbetter
tactiletactile artificialartificial sensorysensory systemssystems inin
roboticsroboticsDESIGN&BUILD
biomechatronic
platforms for
investigation of
HUMAN TOUCH
study of texture
neural encoding
(measurement of
peripheral neural
firing and brain
responses by means
of microneurography
and EEG) and for for
psychophysical
experiments on
roughness/texture
perception
In collaboration with
Prof. Alan Wing
University of Birmingham, UK
Prof. Johan Wessberg, Goteborg University, SE
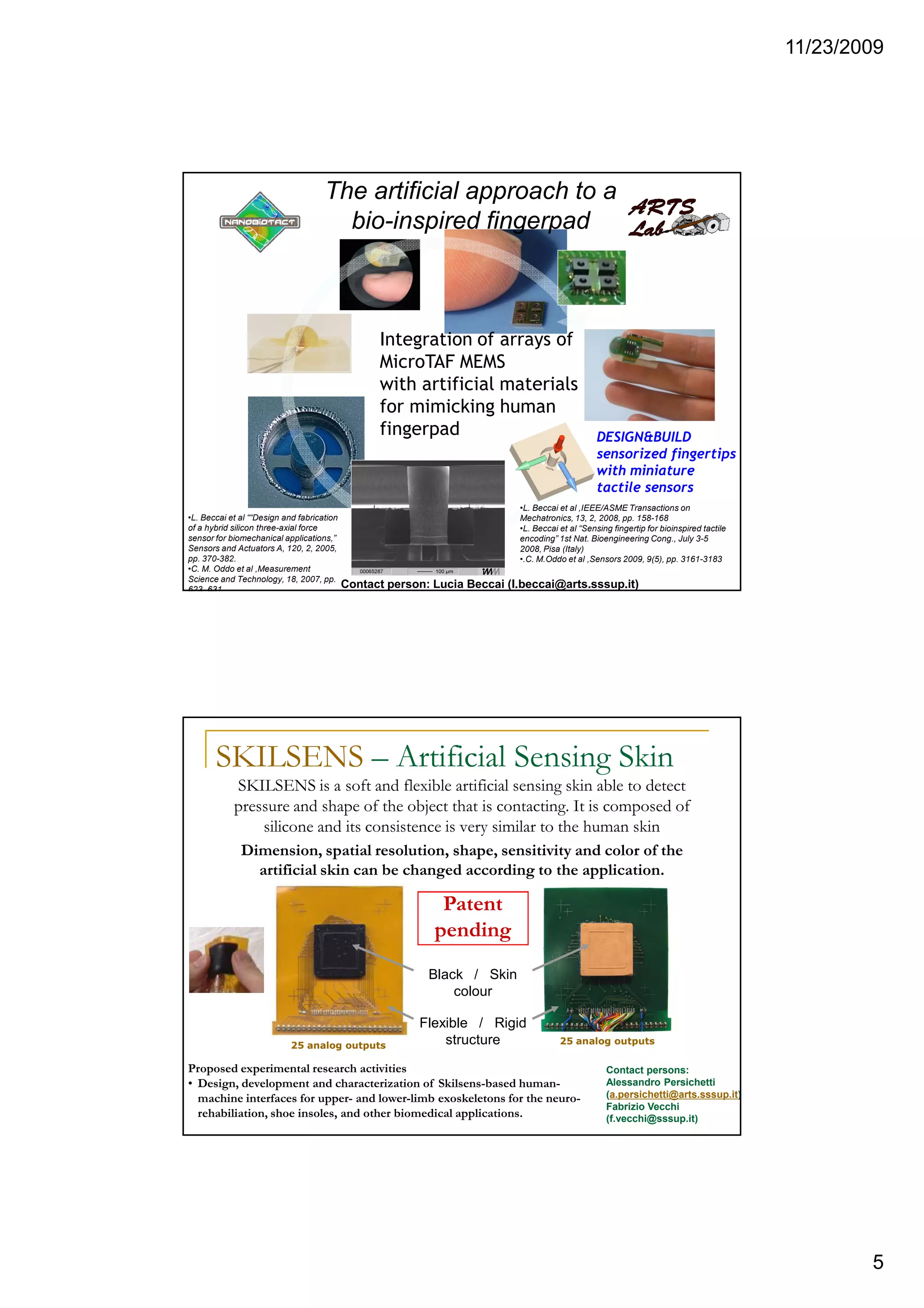
MEMS based approach for artificial fingerpad
for texture encoding
Tissue engineered skin
New approaches investigated for biomimetic
fingertip
Integration of tissue
engineering approaches
with MEMS/NEMS
approach to artificial skin
NEMS capacitive array
MEMS piezoresistive array
Contact person: Lucia Beccai (l.beccai@arts.sssup.it)
In collaboration with
Prof. Mike Adams, Dr. Liam Grover,
Dr. Mike Ward University of Birmingham, UK
Study of Human Touch and artificialStudy of Human Touch and artificial
emulation with tactile systemsemulation with tactile systems
discriminative
touch](https://image.slidesharecdn.com/biorobotics-101102075635-phpapp02/75/Biorobotics-4-2048.jpg)




This document provides an overview of ongoing research projects at the ARTS and CRIM Labs in Italy. It summarizes several projects including development of artificial hands, neuro-robotics interfaces, tactile sensors, rehabilitation robotics, humanoid robots, and micro-robotics. Key areas of research include neural interfaces, biomimetic design, neurorehabilitation, assistive technologies, and studies of human touch and sensory processing. Researchers are developing technologies such as prosthetic hands, exoskeletons, and sensory systems inspired by the human body. The document outlines various prototype systems and international collaborations on projects related to prosthetics, rehabilitation, and understanding the human sensory and motor systems.


































































