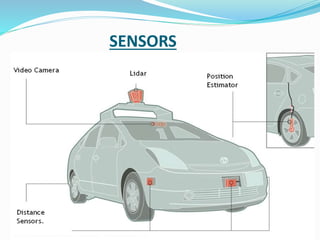
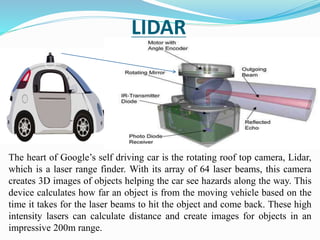
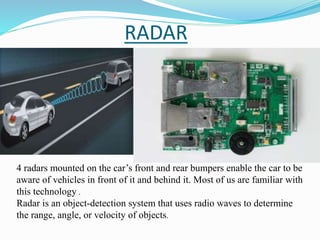
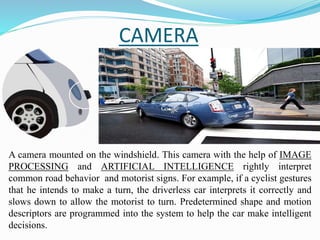
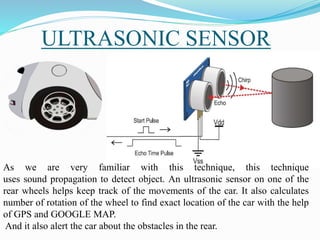
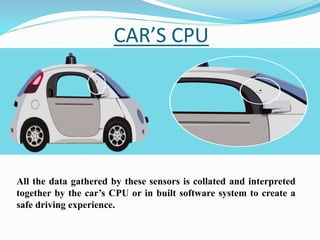
This document discusses Google's driverless car technology. It describes the key components of Google's driverless cars, including Lidar, radar, cameras, and ultrasonic sensors that allow the cars to navigate roads autonomously. The document also outlines some of the major challenges facing driverless car technology, such as difficulties operating in heavy rain or differentiating between objects. The goal of Google's driverless car is to reduce accidents caused by human error by developing fully autonomous vehicles.