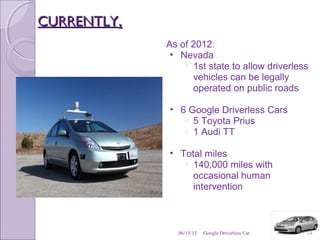
The document discusses Google's driverless car project. It describes how the car uses sensors like LIDAR and video cameras along with Google Maps and artificial intelligence software to navigate roads safely without human intervention. The AI analyzes sensor data to determine speed, steering, and navigation. Google has tested the technology extensively, logging over 140,000 miles. The conclusion suggests driverless vehicles could be commercially available within 5 years.





































































![[English Version]Maker-Ray Product Brochure V3 .pdf](https://cdn.slidesharecdn.com/ss_thumbnails/englishversionmaker-rayproductbrochurev3-260113094444-0156dbdc-thumbnail.jpg?width=640&height=640&fit=bounds)














