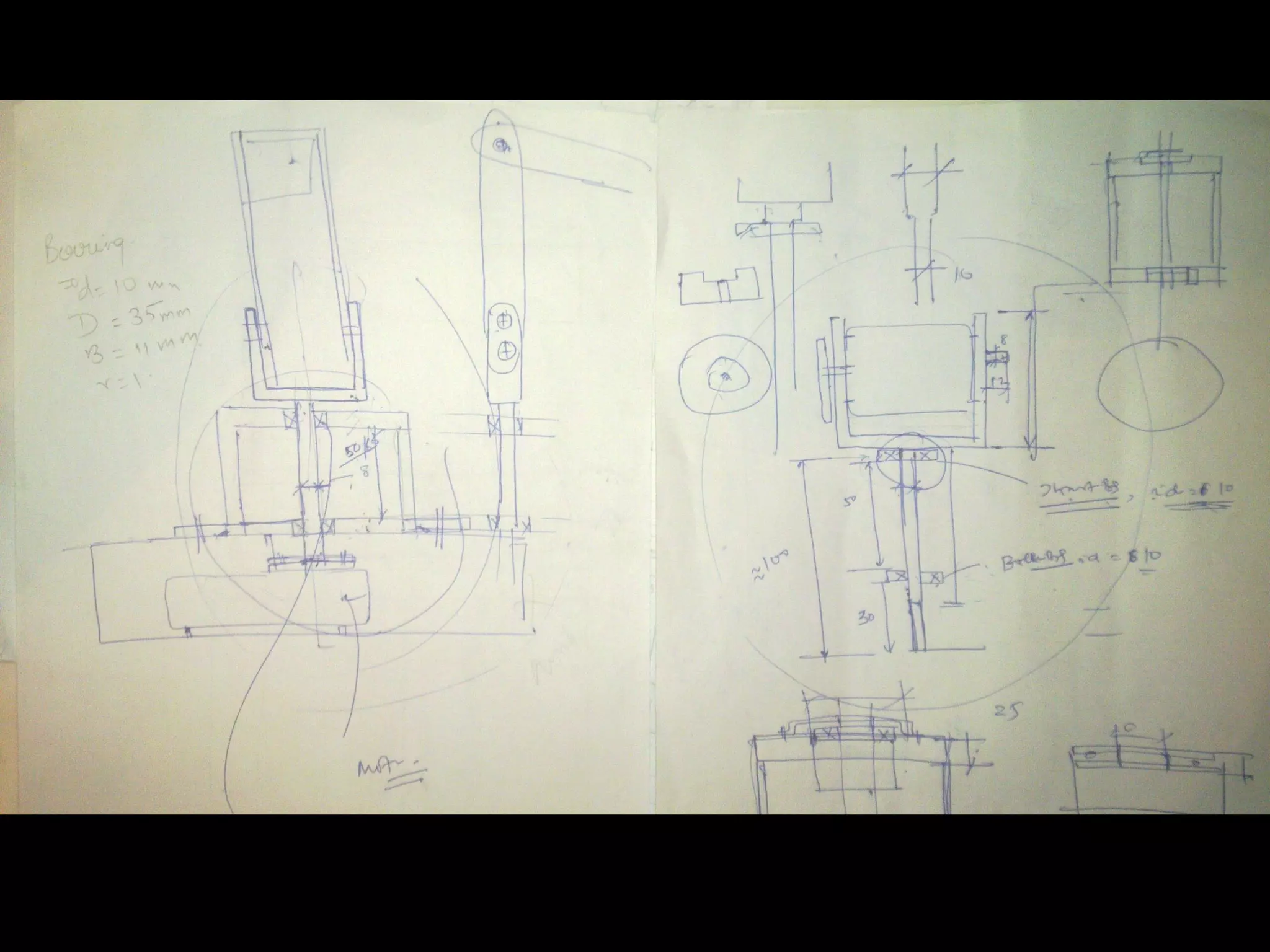
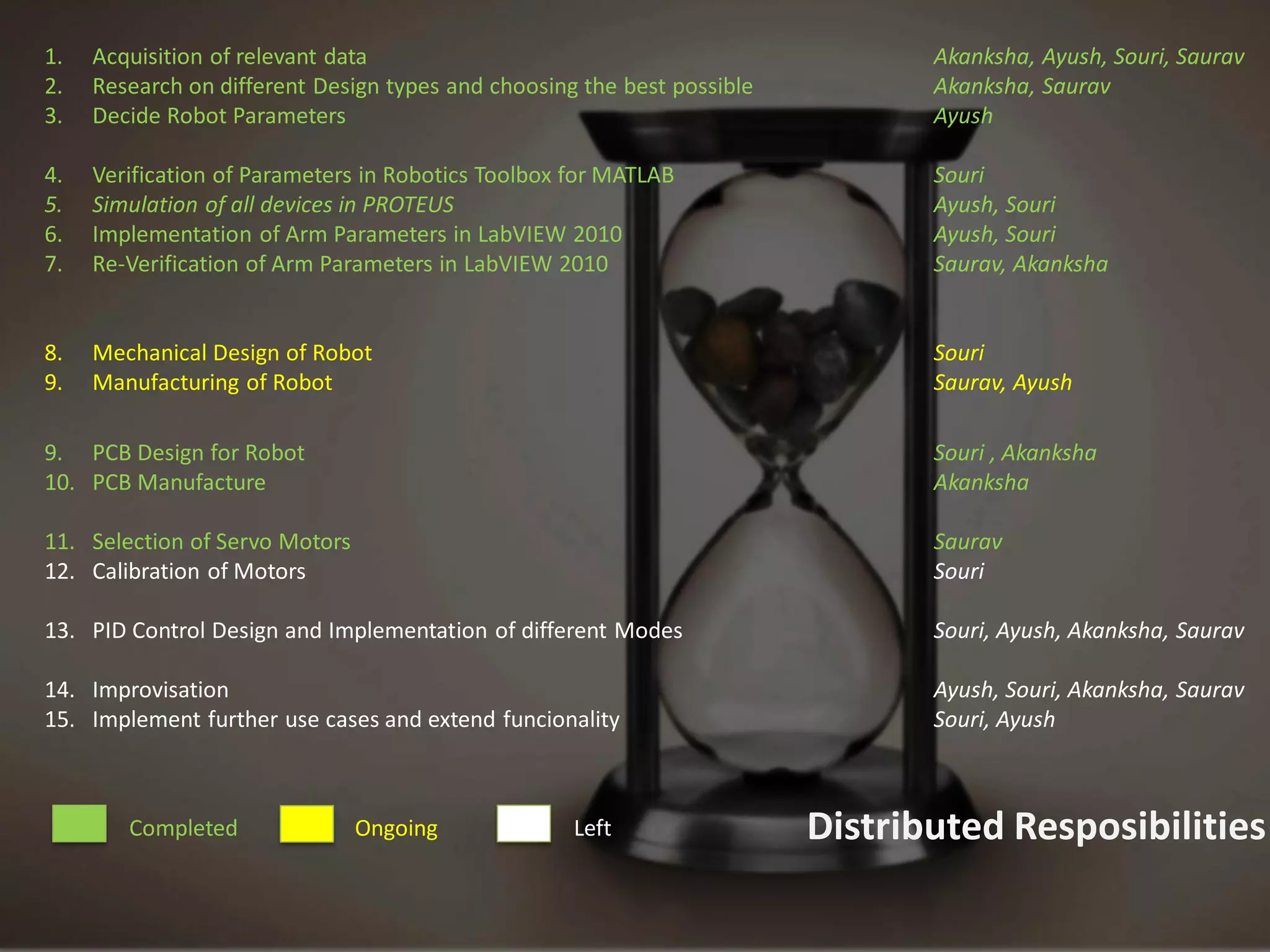
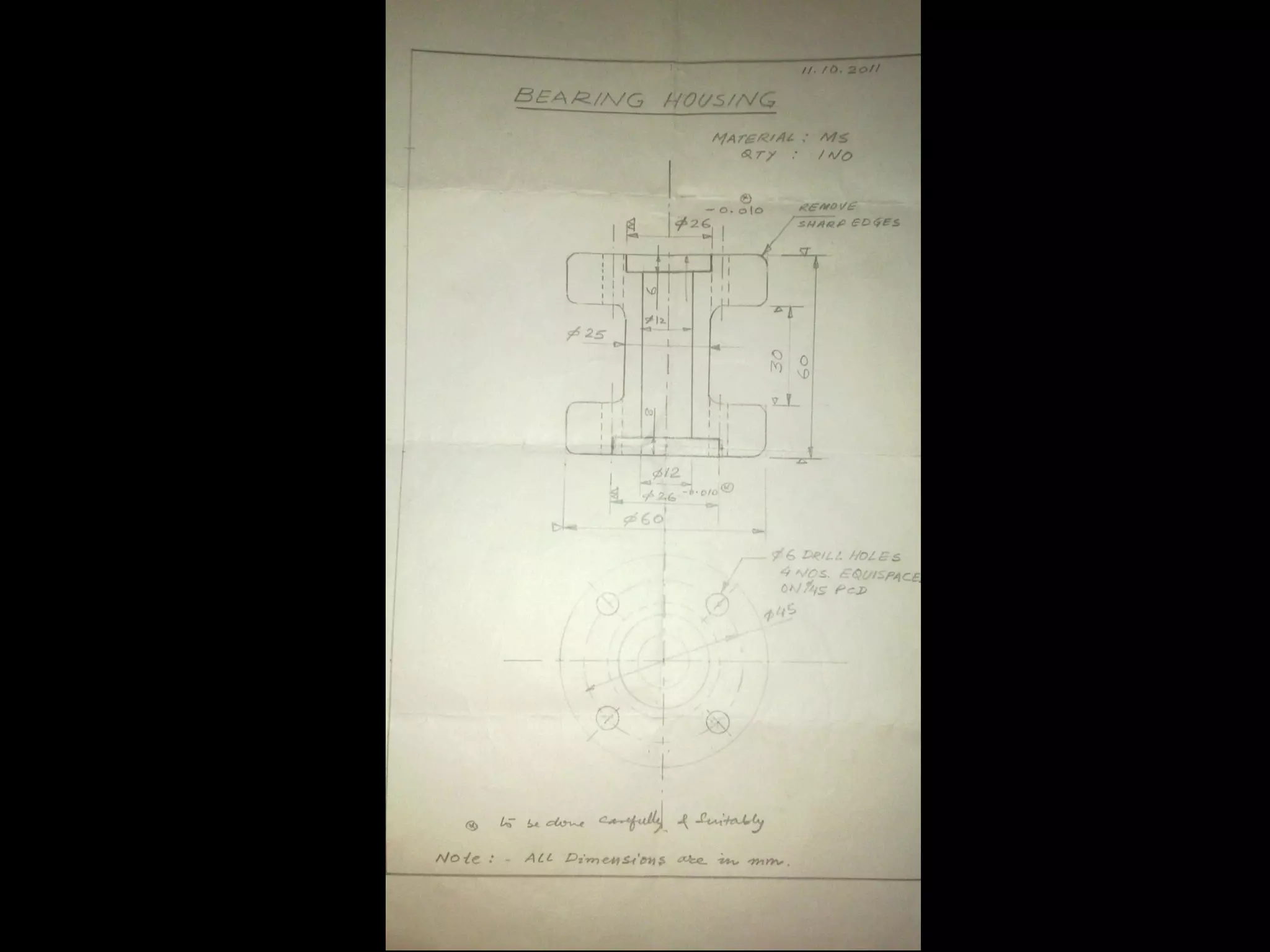
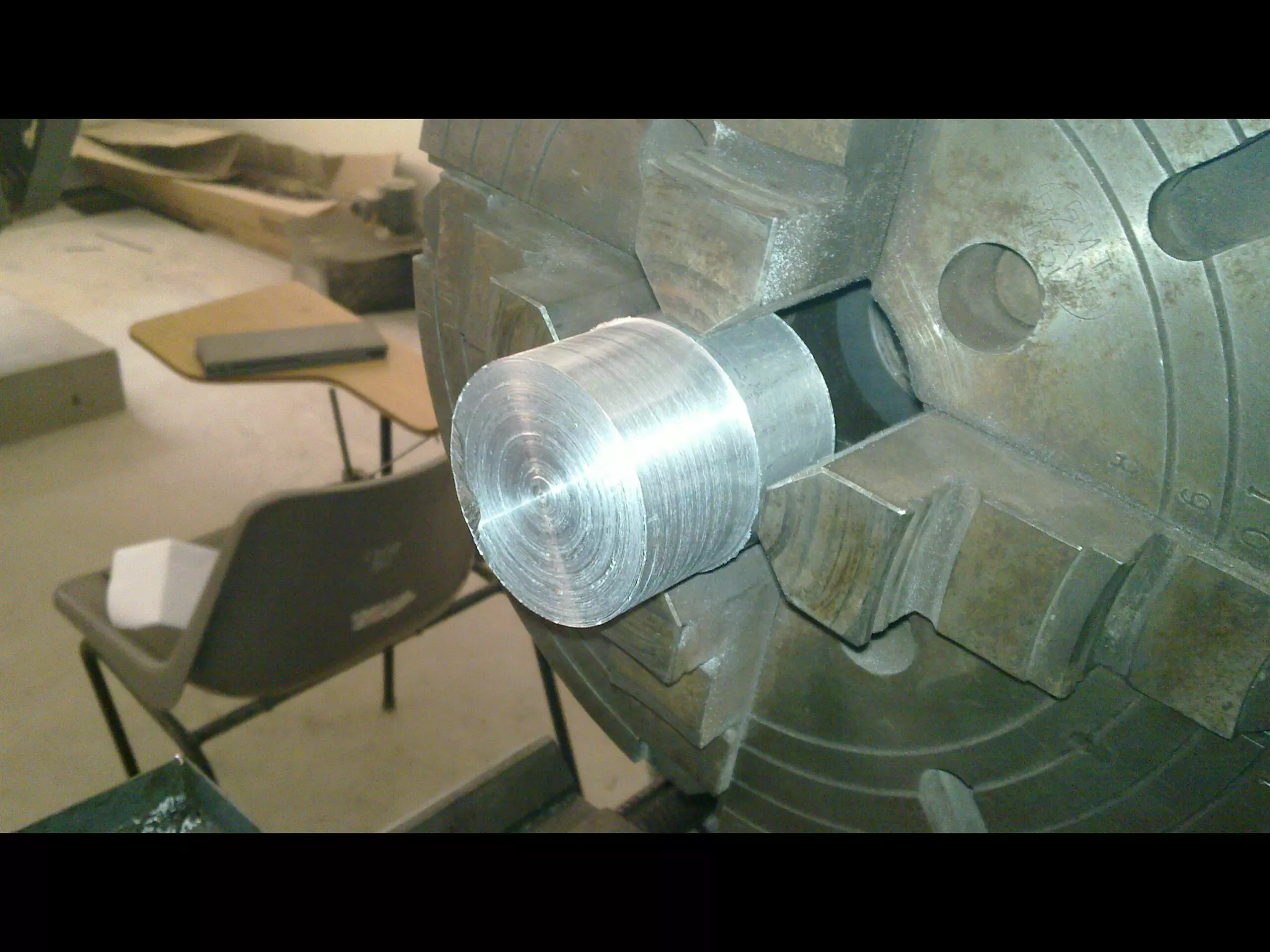
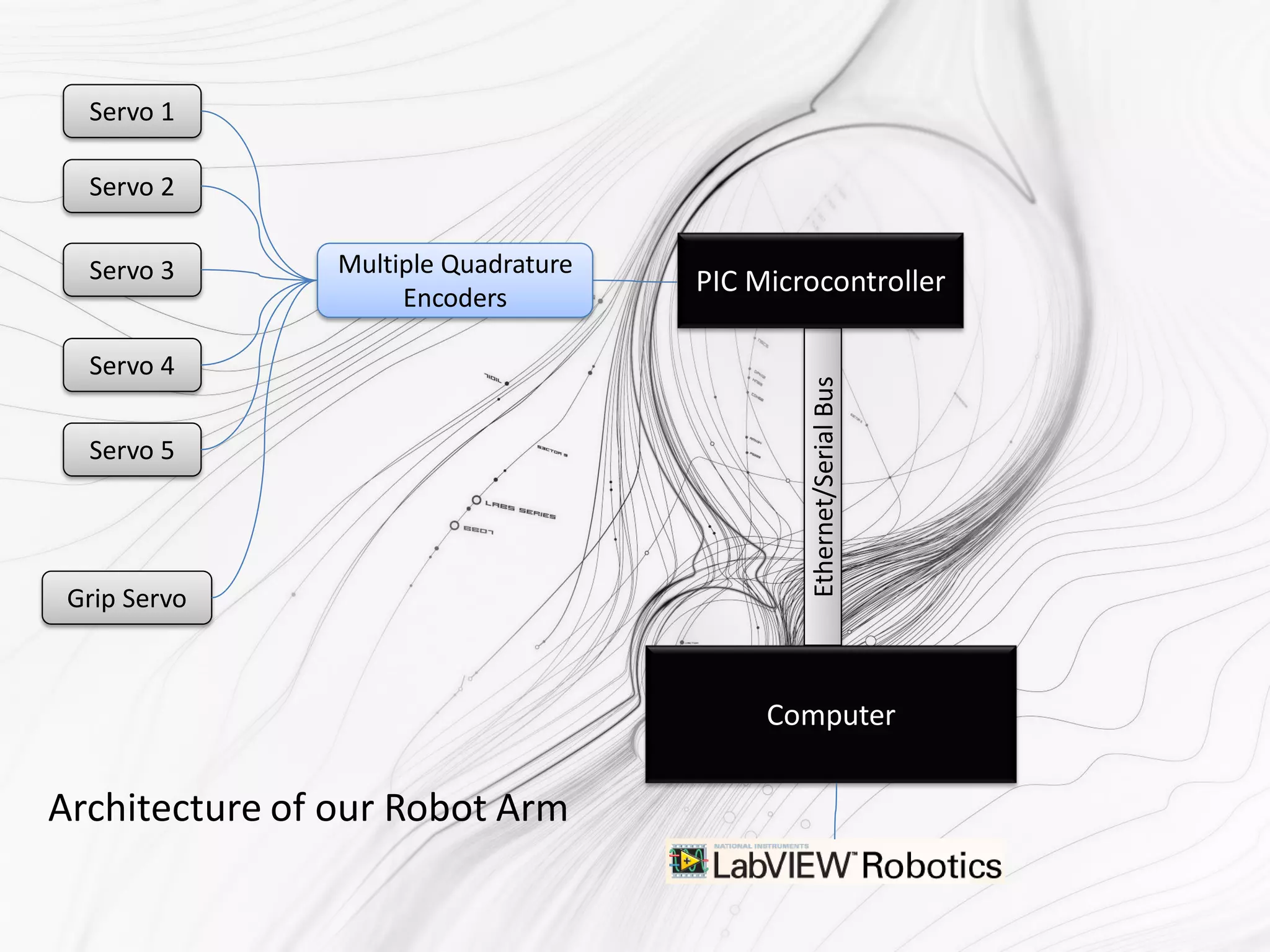
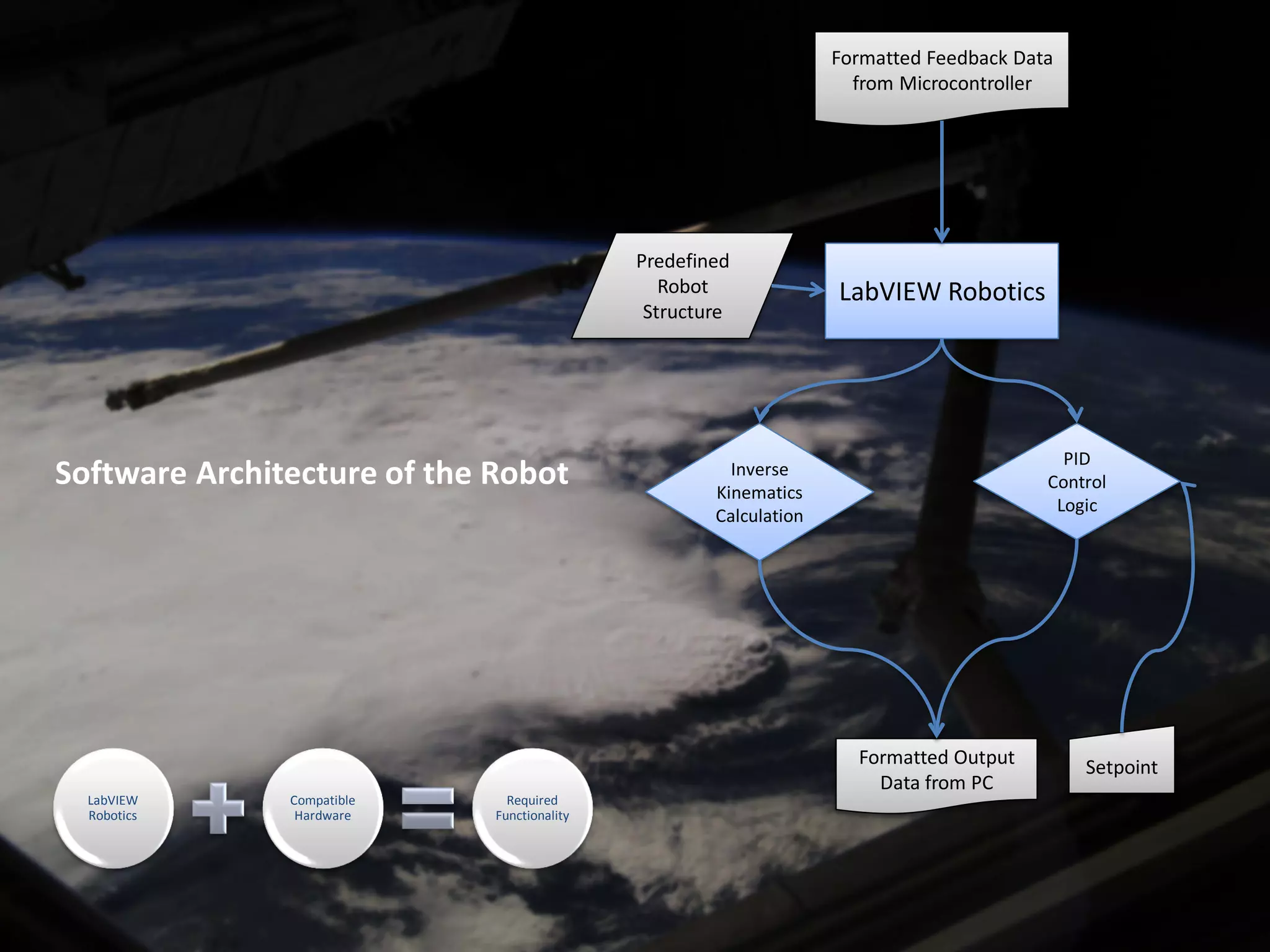
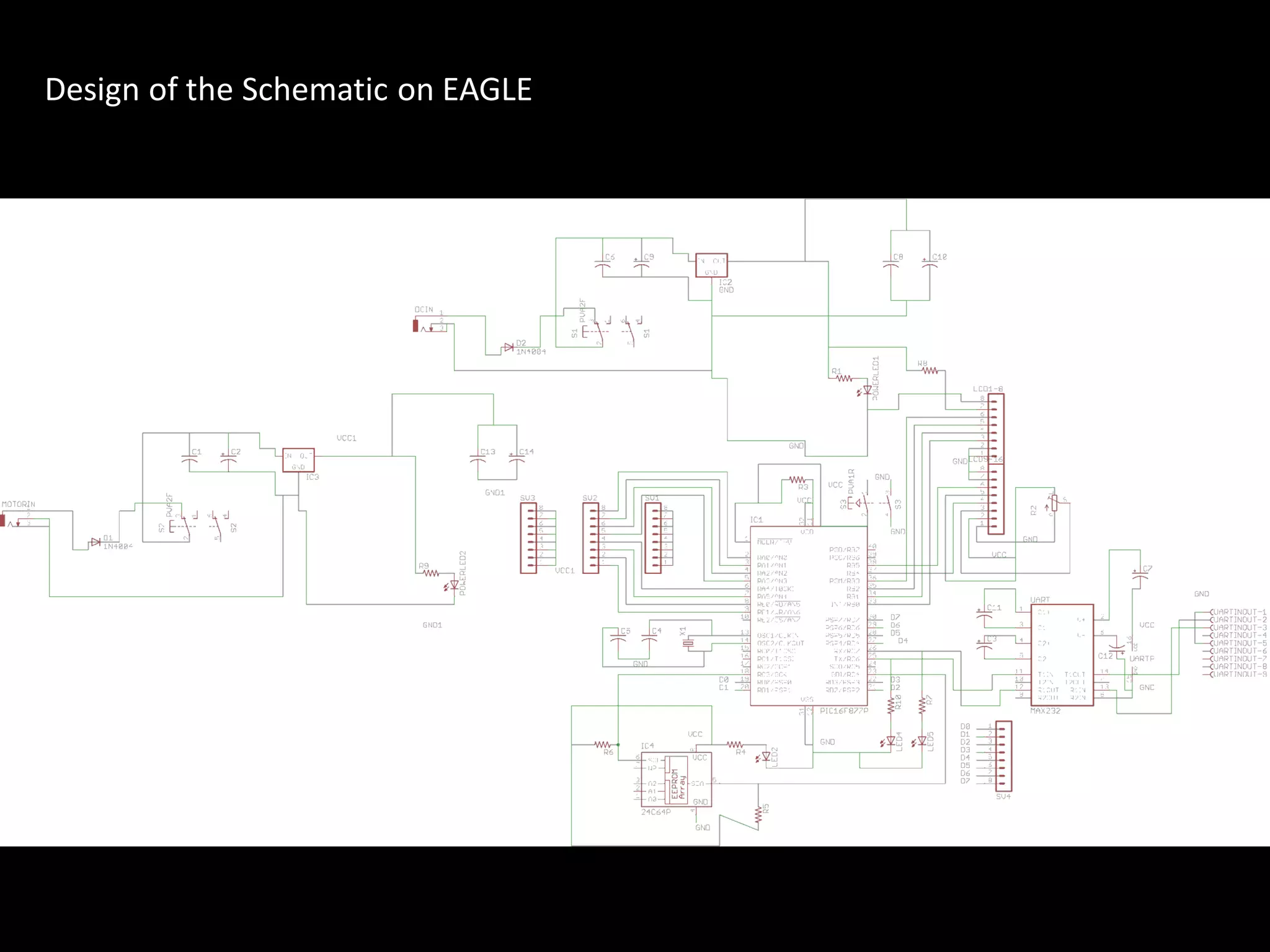
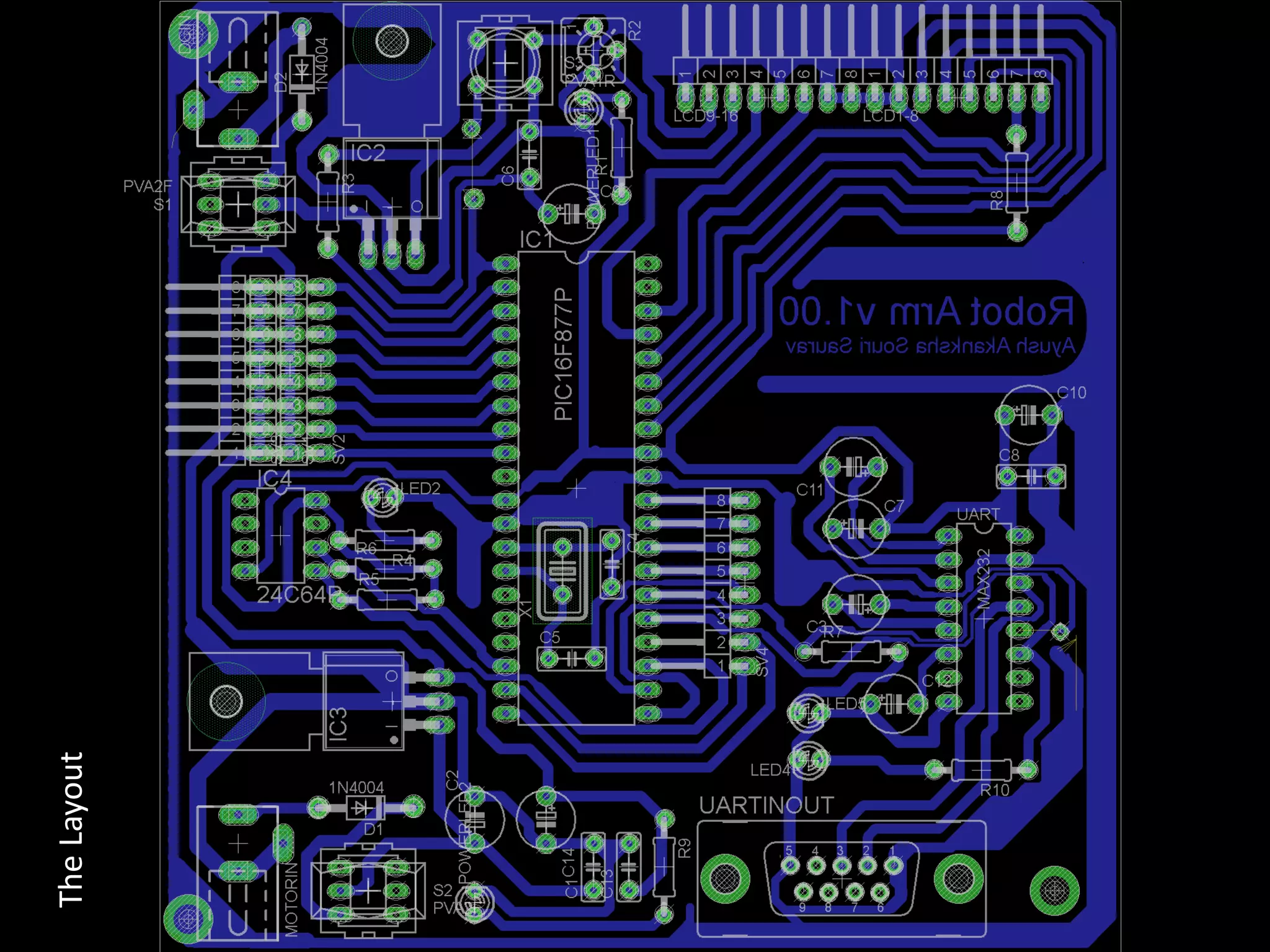
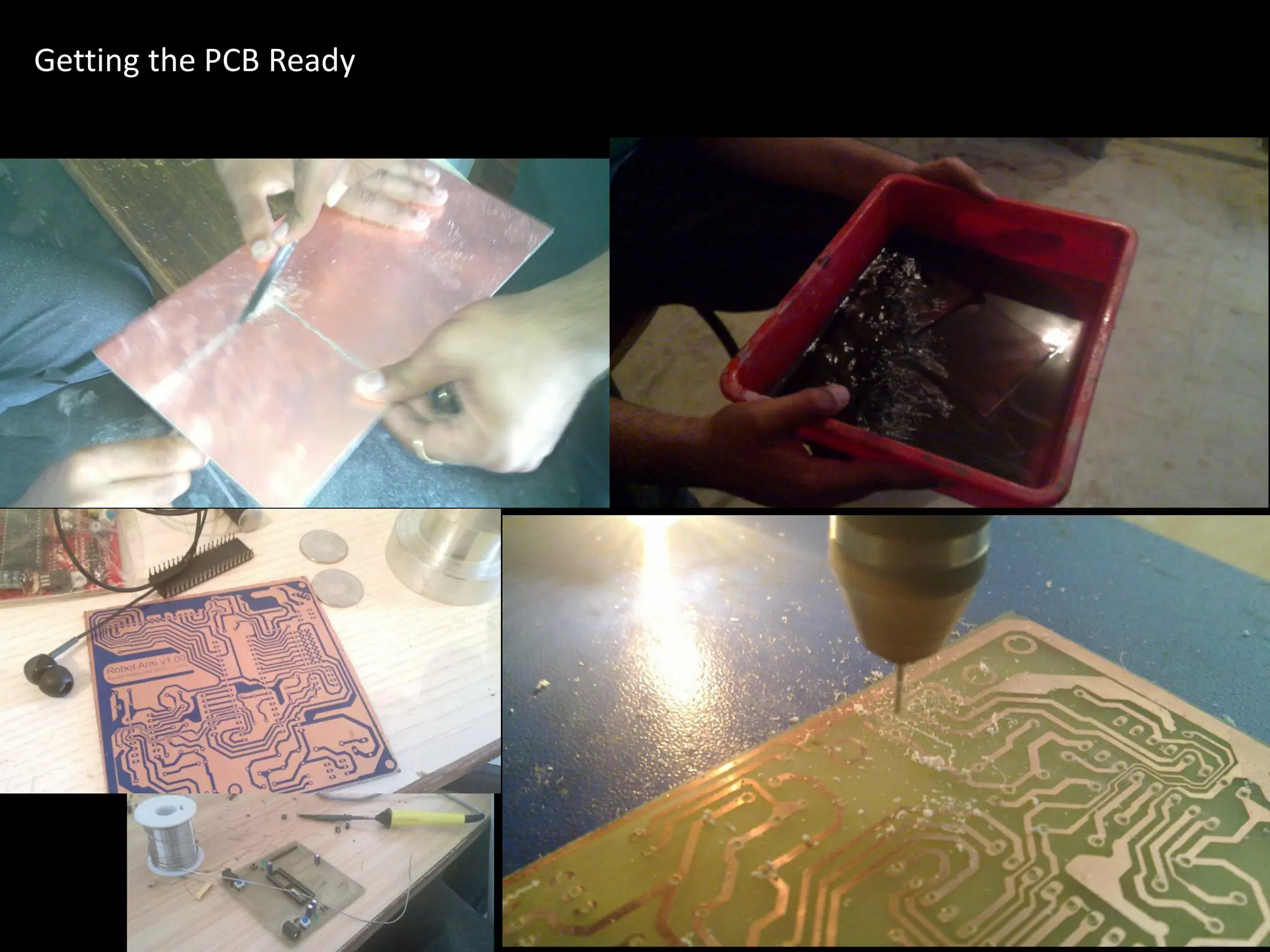
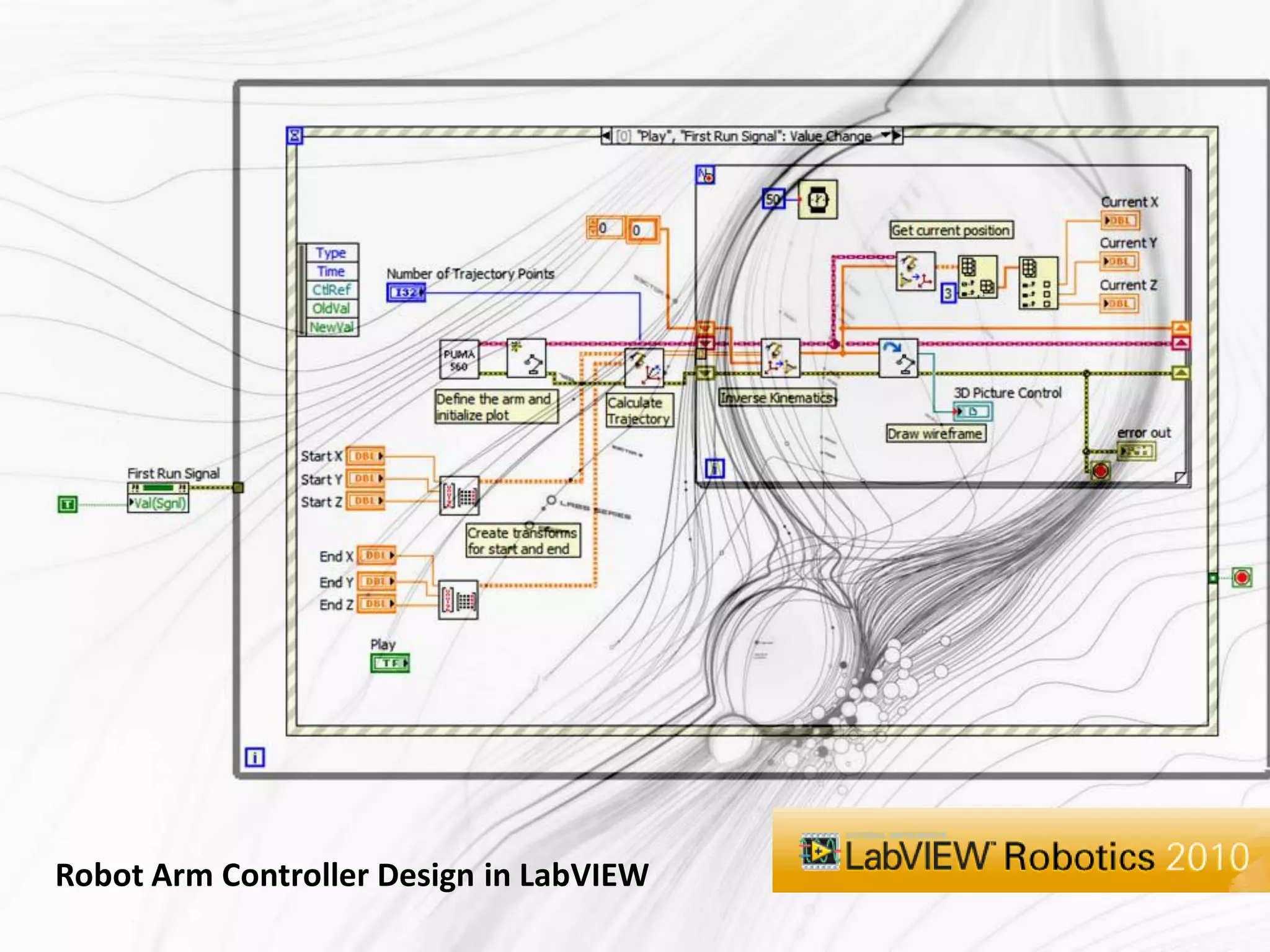
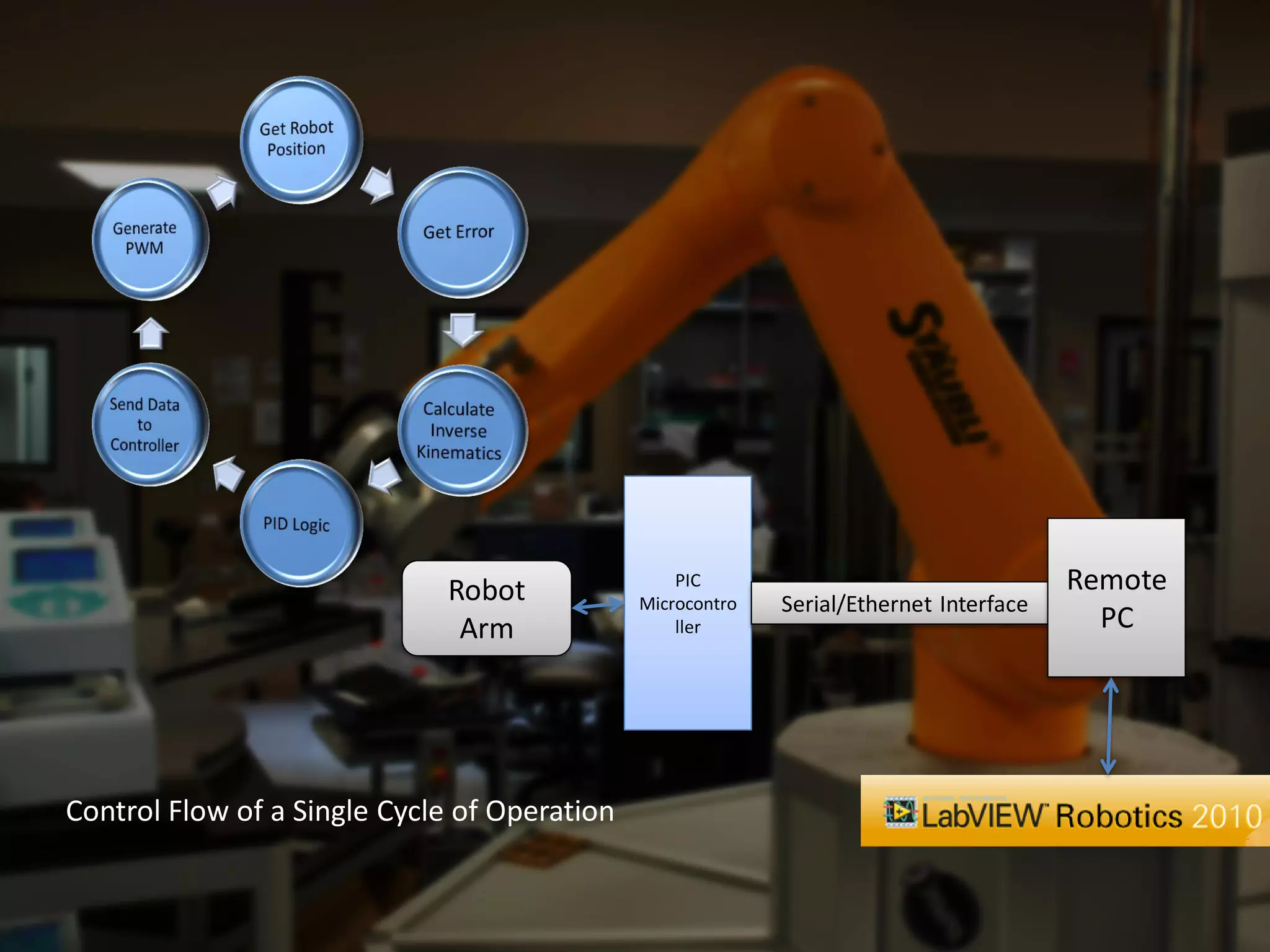
The document describes the development of a 5-axis robot arm using a PIC microcontroller and LabVIEW. The team's goal was to build a robot arm that could pick and place small objects through real-time communication between the PIC and LabVIEW. They divided the work into mechanical design, electronic design including a custom PCB, and programming the microcontroller and LabVIEW interface. The robot arm is controlled through PID logic in LabVIEW which calculates inverse kinematics and sends commands to the PIC and servo motors.