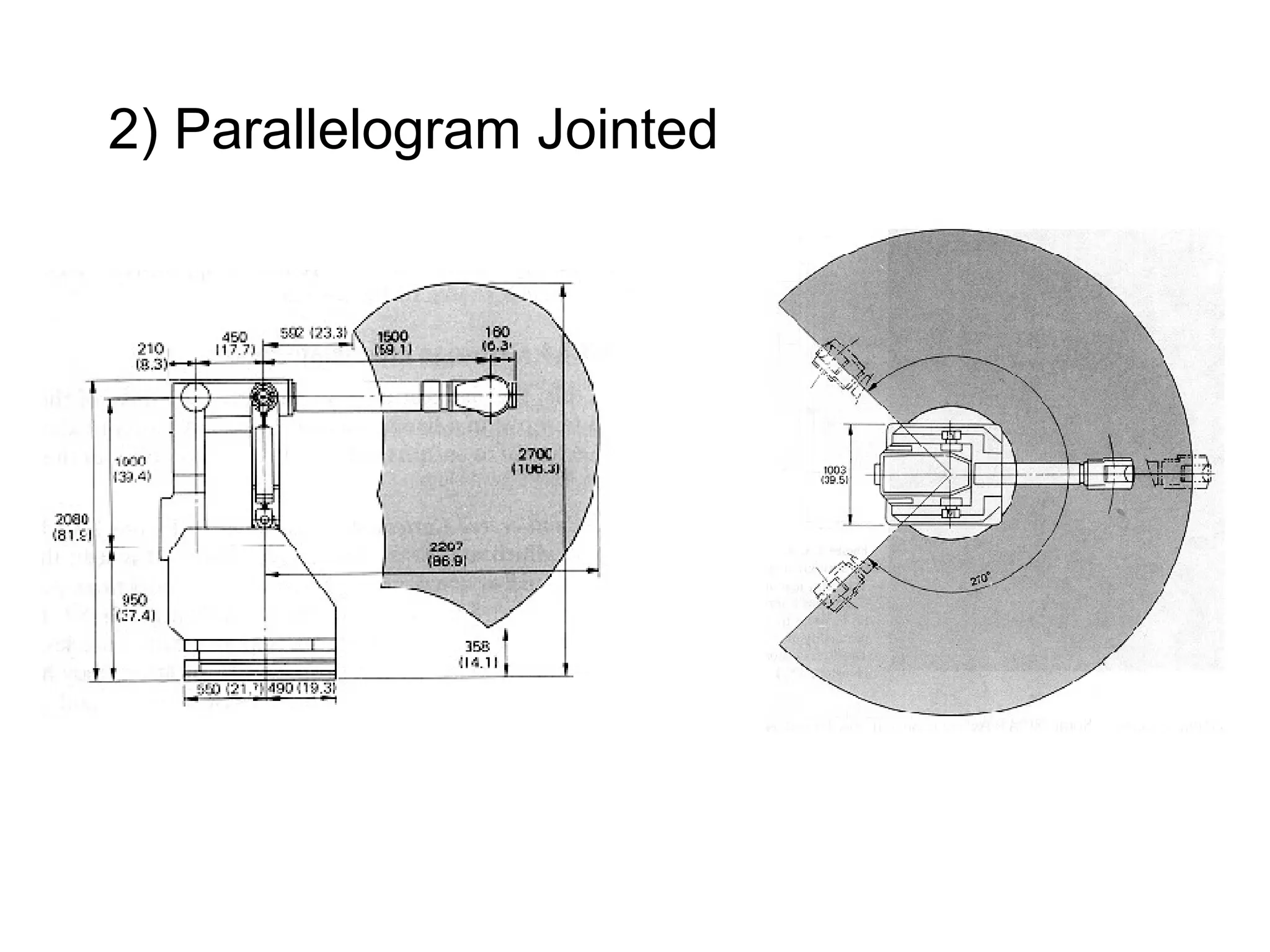
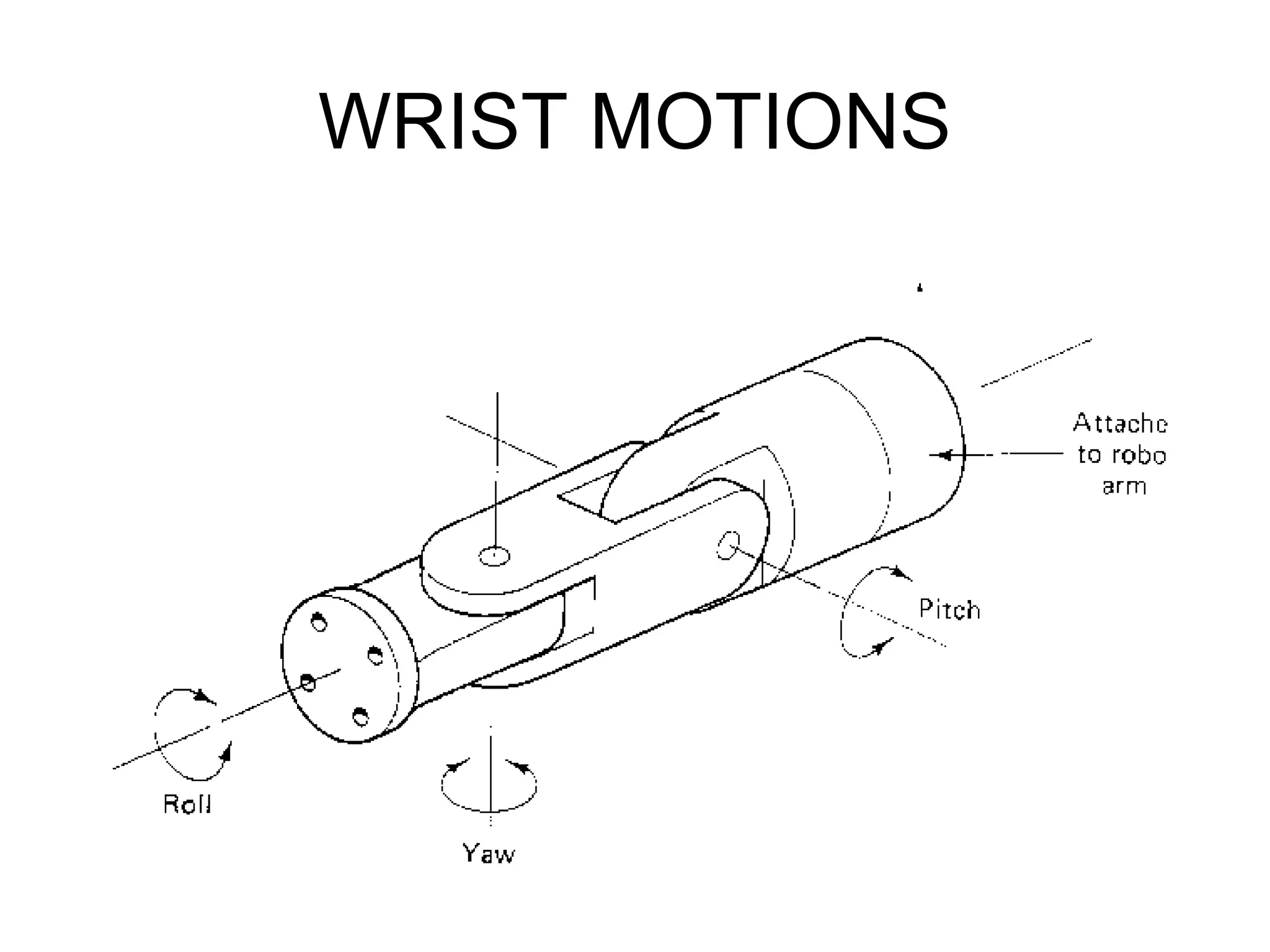
The document provides an overview of robotics, focusing on industrial manipulators and various classifications of robots including variable-sequence, playback, and intelligent robots. It discusses robot accessories, configurations like Cartesian and articulated joints, and control methods used in robotic programming. Additionally, it highlights significant milestones in robotic history and outlines the needs for effective robot programming through various methods and languages.