Downloaded 60 times


![•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
}
delay(50);//for 4ms
while(EOC==1);
while(EOC==0);
OE=1;
delay(10);//for 4ms
value=MYDATA;
OE=0;
TR0=0;
return(value);
}
unsigned char *display_numbers(unsigned char abbc)
{
unsigned char kkk[3],ttt=0;
while(ttt<3)
{
kkk[ttt]=abbc%10;
ttt++;
abbc=abbc/10;
}
return(kkk);](https://image.slidesharecdn.com/fanautomation-131212091324-phpapp02/85/Fan-automation-15-320.jpg)
![void main()
{
unsigned char *bb,temp_resister;
initialize();
m1a=0;
m1b=0;
cmd(0x80);
ptr("Temperature= ");
TMOD=0X02; //mode 2
TH0=0xfb;
IE=0X82;
TR0=0;
//timer stop
cmd(0xc0);
bb[0]=0;
bb[1]=0;
bb[2]=0;](https://image.slidesharecdn.com/fanautomation-131212091324-phpapp02/85/Fan-automation-16-320.jpg)


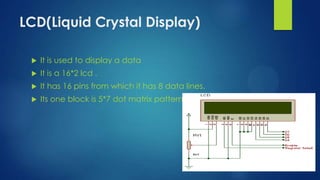
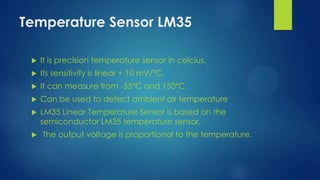
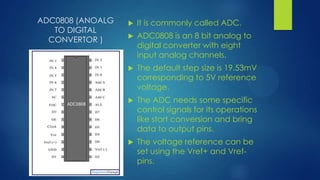
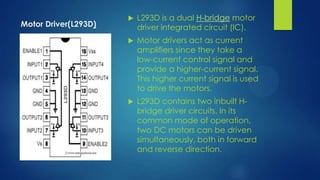
This document describes a home temperature control system using a microcontroller. It contains sections on the introduction, how it works, advantages, applications, power supply, components used including an ADC, LCD, temperature sensor, motor driver, and program flow. The system uses these components to measure temperature using a sensor, display it on an LCD, and control a fan motor based on the temperature reading.