Downloaded 16 times

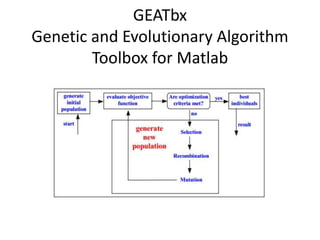

Evolutionary robotics is a method for creating autonomous robots using principles from evolutionary biology, such as selective reproduction of the fittest. The document discusses the differences between optimization and synthesis, outlining how synthesis allows for the open-ended design of robotic systems through iterative adaptation and the integration of various components. It also covers the representation of robot morphologies, the evolution of controllers and structures in physical reality, and mentions advancements in modular and self-replicating robots.