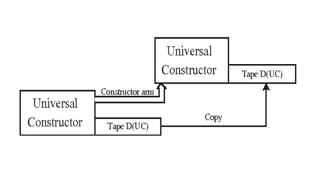
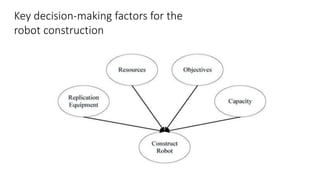
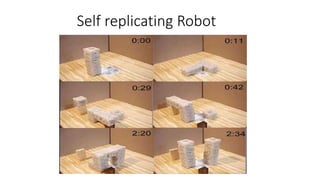
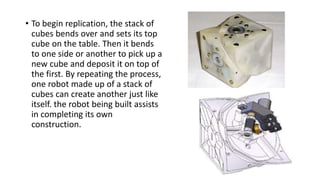
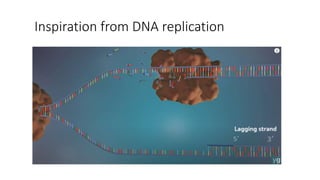
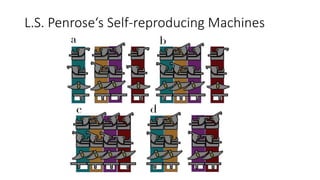
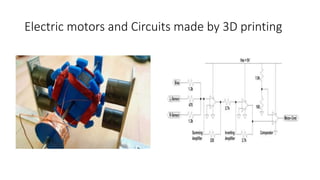
This document discusses the concept of self-replicating electromechanical robots. It describes how robots made of modular cubes that can bend and manipulate other cubes could replicate themselves by bending over to pick up additional cubes and adding them to the growing replica. The process is inspired by DNA replication. Key requirements for self-replicating robots include mobility, communication, processing, and sensors. An example is given of a soft, self-regenerating robotic octopus arm that could mimic an octopus' muscular structure and virtually unlimited degrees of freedom. The goal is to create robots that can replicate or repair themselves to operate more flexibly in space or hazardous environments.