This document discusses eigenvalues, eigenvectors, and quadratic forms. It provides examples of how to:
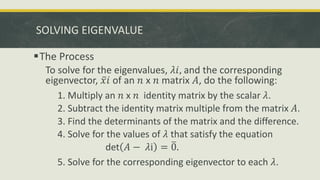
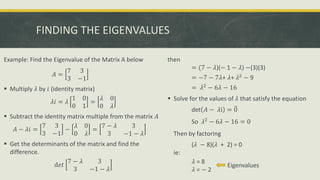
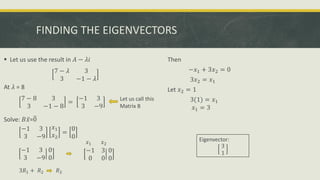
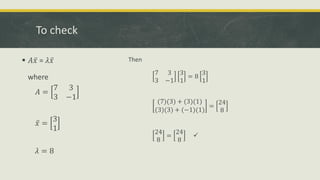
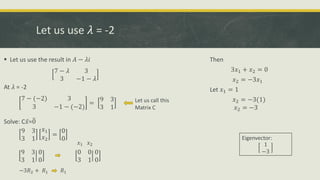
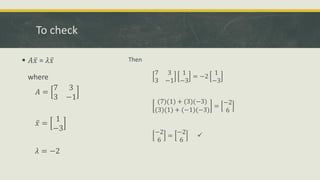
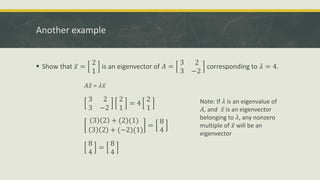
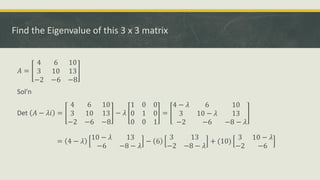
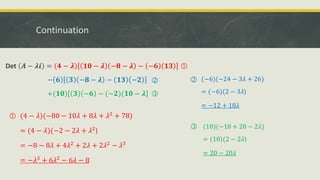
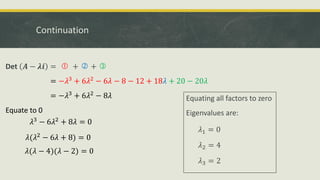
- Find the eigenvalues and eigenvectors of a matrix by solving the characteristic equation.
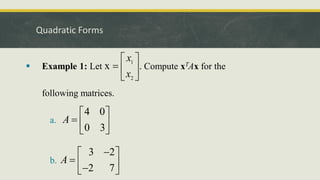
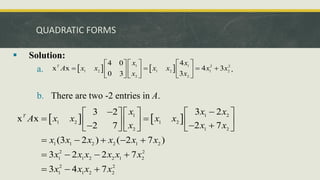
- Express a quadratic form in terms of a matrix and change variables using an invertible matrix to diagonalize the quadratic form.
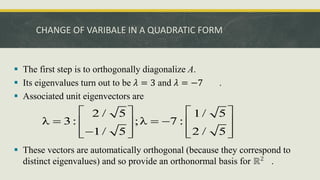
- Use orthogonal diagonalization to transform a quadratic form with cross-product terms into one without cross-product terms. Step-by-step solutions and explanations are provided for examples involving 2x2 and 3x3 matrices.