Divide and conquer is a general algorithm design paradigm where a problem is divided into subproblems, the subproblems are solved independently, and the results are combined to solve the original problem. Binary search is a divide and conquer algorithm that searches for a target value in a sorted array by repeatedly dividing the search interval in half. It compares the target to the middle element of the array, and then searches either the upper or lower half depending on whether the target is greater or less than the middle element. Finding the maximum and minimum elements in an array can also be solved using divide and conquer by recursively finding the max and min of halves of the array and combining the results.
DIVIDE AND CONQUER
PRESENTEDBY
M.RAMYA
M.sc[CS&IT]
NADAR SARASWATHI COLLEGE OF ARTS
&SCIENCE,
VADAPUDUPATTI , THENI.
2.
GENERAL METHOD
• Afunction to compute on n inputs the divide and conquer
strategy suggests splitting the inputs into k distinct subsets , 1
< k ≤ n , yielding k sub problems.
• If the sub problems are still relatively large , then the divide
and conquer strategy can possibly be reapplied
3.
CONTROL ABSTRACTION FORDIVIDE AND
CONQUER
Algorithm DAndC(P)
{
if Small(P)then return S(P);
else
{
divide P into smaller instances P1,P2,……,Pk , k≥1;
Apply DAndC to each of these sub problems;
return Combine(DAndC(P1),DAndC(P2),…,DAndC(Pk));
}
}
4.
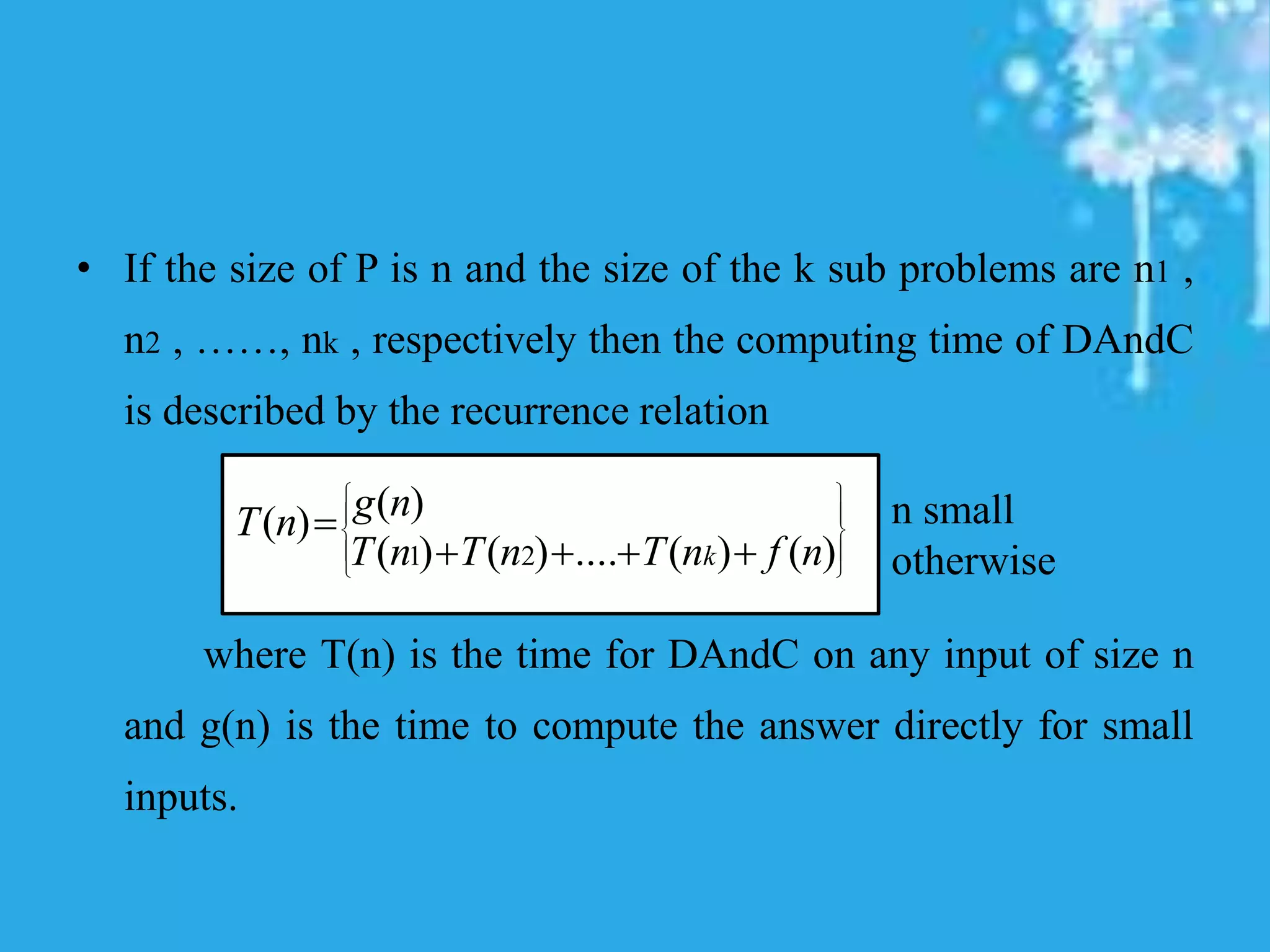
• If thesize of P is n and the size of the k sub problems are n1 ,
n2 , ……, nk , respectively then the computing time of DAndC
is described by the recurrence relation
where T(n) is the time for DAndC on any input of size n
and g(n) is the time to compute the answer directly for small
inputs.
)()(....)()(
)()(
21 nfnTnTnT
ngnT
k
n small
otherwise
5.
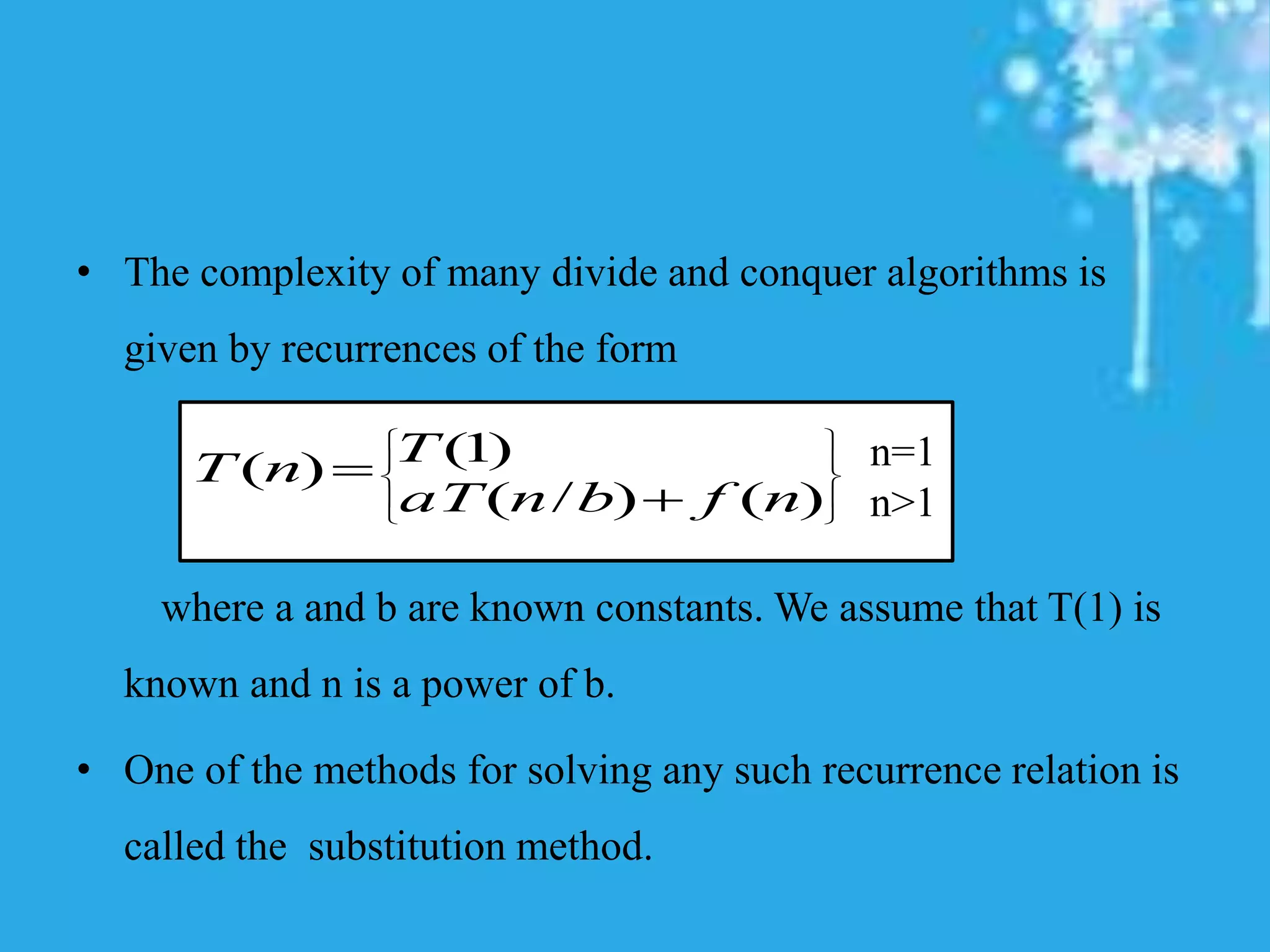
• The complexityof many divide and conquer algorithms is
given by recurrences of the form
where a and b are known constants. We assume that T(1) is
known and n is a power of b.
• One of the methods for solving any such recurrence relation is
called the substitution method.
)()/(
)1()(
nfbnaT
TnT n=1
n>1
6.
BINARY SEARCH
• Letai , 1 ≤ i ≤ n , be a list of elements that are sorted in
nondecreasing order. Consider the problem determine where a
given element x is present in the list. If x is present , we are to
determine a value j such that aj = x. If x is not in the list , then j
is to be set to zero.
7.
RECURSIVE BINARY SEARCH
AlgorithmBinSrch(a , i , l , x)
{
if(l = i) then
{
if (x = a[i]) then return i;
else return 0;
}
else
{
mid:=[(i+l)/2];
if (x=a[mid]) then return mid;
else if (x < a[mid]) then
return BinSrch(a , i , mid-1 , x );
else return BinSrch(a , mid+1 , l , x);
}
}
8.
ITERATIVE BINARY SEARCH
AlgorithmBinSearch(a , n , x)
{
low:=1; high:=n;
while (low ≤ high) do
{
mid:=[(low + high)/2];
if (x < a[mid]) then high:=mid-1;
else if (x > a[mid]) then low:=mid+1;
else return mid;
}
return 0;
}
9.
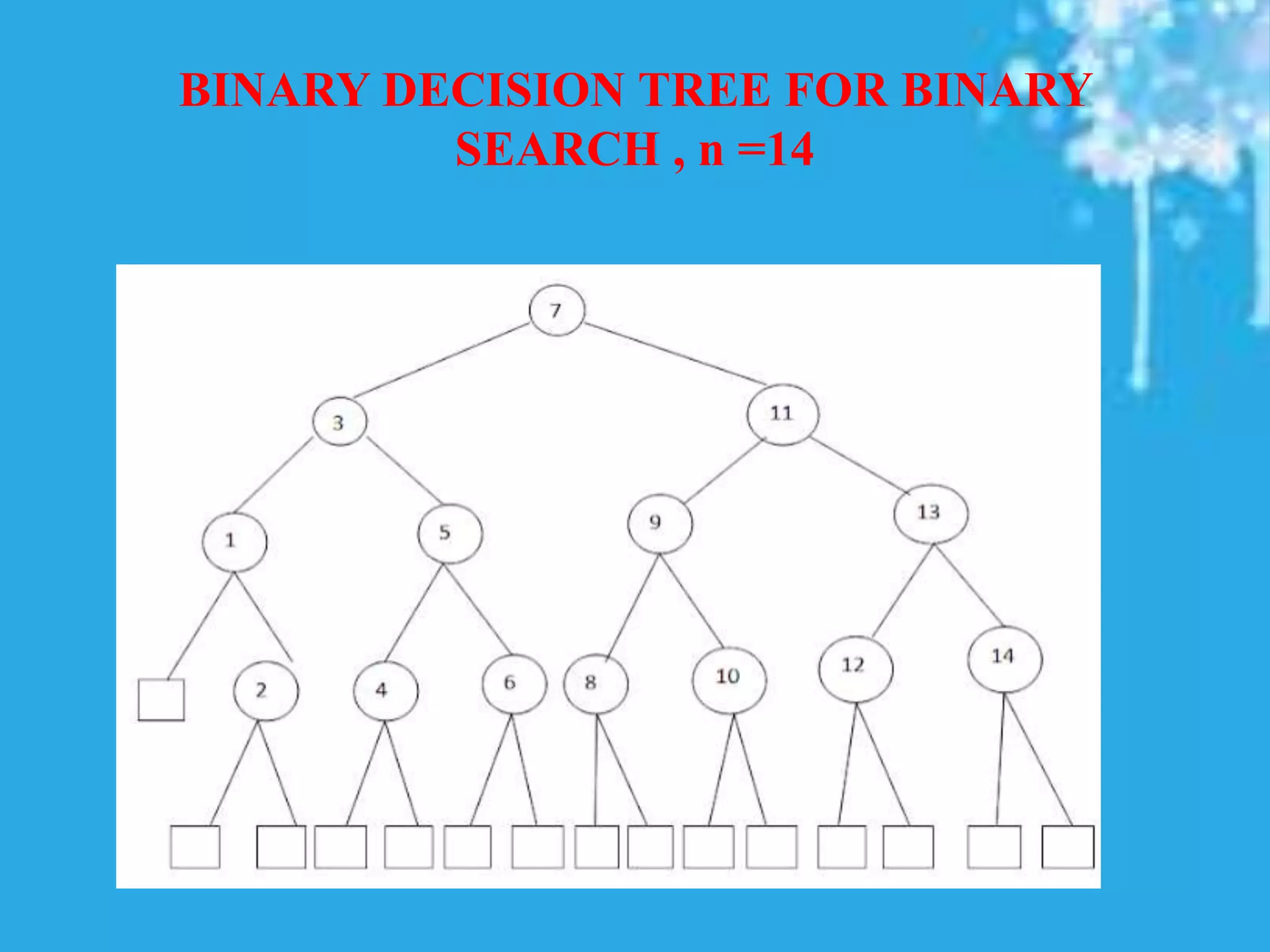
THREE EXAMPLES OFBINARY SEARCH ON 14
ELEMENTS
Example:
Let us consider 14 entries:
-15,-6,0,7,9,23,54,82,101,112,125,131,142,151
• Place them in a[1:14] and simulate the steps that bin search goes through as
it searches for different values of x.
• Only the variables low, high and mid need to be traced as we simulate the
algorithm.
• We try the following values for x: 151,-14,9 for two successful searches
and one unsuccessful search. The traces of these three inputs shows below:
X = 151 low high mid
1 14 7
8 14 11
12 14 13
14 14 14
Found
10.
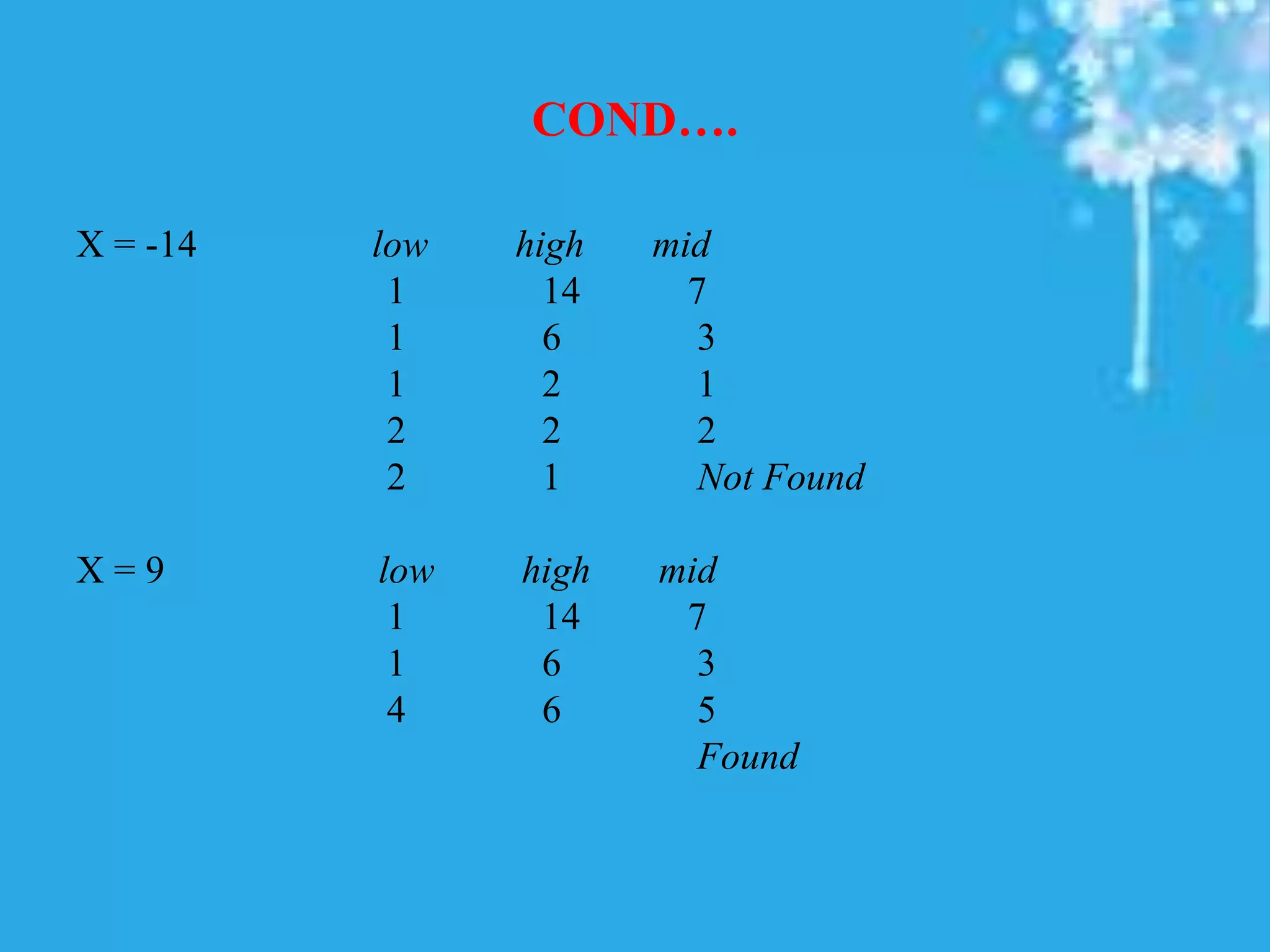
COND….
X = -14low high mid
1 14 7
1 6 3
1 2 1
2 2 2
2 1 Not Found
X = 9 low high mid
1 14 7
1 6 3
4 6 5
Found
BINARY SEARCH USINGONE COMPARSION
PER CYCLE
Algorithm BinSearch1(a , n , x)
{
low:=1;high:=n+1;
while (low<(high-1)) do
{
mid:=[(low+high)/2];
if(x < a[mid]) then high:=mid;
else low:=mid;
}
if (x=a[low]) then return low;
else return 0;
}
14.
ADVANTAGES
1. In thismethod elements are eliminated by half each time .So it is
very faster than the sequential search.
2. It requires less number of comparisons than sequential search to
locate the search key element.
DISADVANTAGES
1. An insertion and deletion of a record requires many records in the
existing table be physically moved in order to maintain the records
in sequential order.
2. The ratio between insertion/deletion and search time is very high.
15.
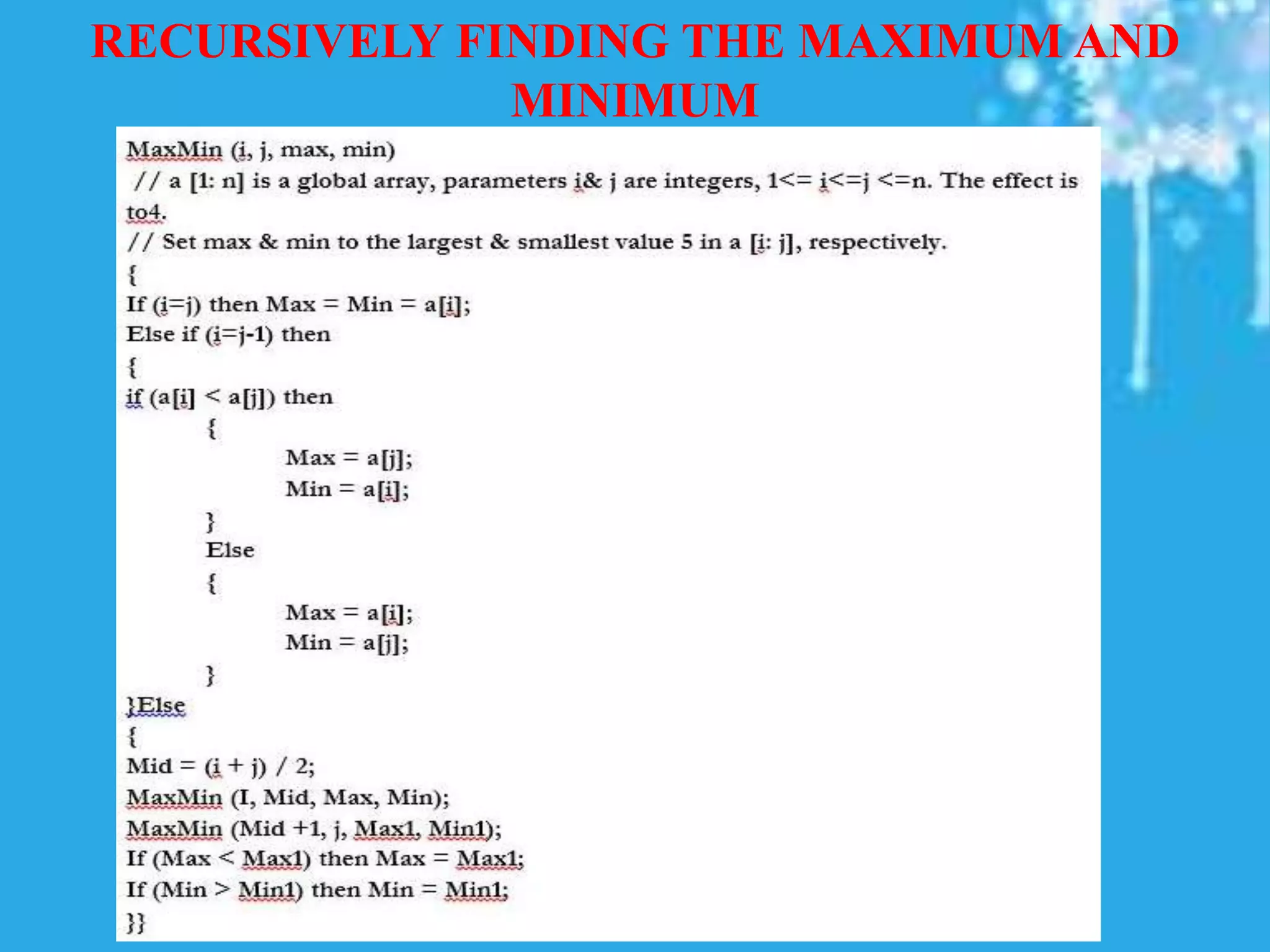
FINDING THE MAXIMUMAND MINIMUM
• The divide and conquer technique. The problem is to find the
maximum and minimum items in a set of n elements.
• More importantly , when the elements in a[1:n] are
polynomials , vectors , very large numbers or strings of
characters , the cost of an element comparison is much higher
than the cost of the other operations. Hence the time is
determined mainly by the total cost of the element
comparisons.
16.
• StraightMaxMin requires2(n-1) element comparisons in the
best , average and worst cases. An immediate improvement is
possible by realizing that the comparison a[i] < min is
necessary only when a[i] > max is false. Hence we can replace
the contents of the for loop by
if (a[i] > max) then max:=a[i];
else if (a[i] < min) then min:=a[i];
17.
STRAIGHTFORWARD MAXIMUM AND
MINIMUM
AlgorithmStraightMaxMin(a , n , max , min)
{
max:=min:=a[1];
for i:=2 to n do
{
if (a[i] > max) then max:=a[i];
if (a[i] < min) then min:=a[i];
}
}
18.
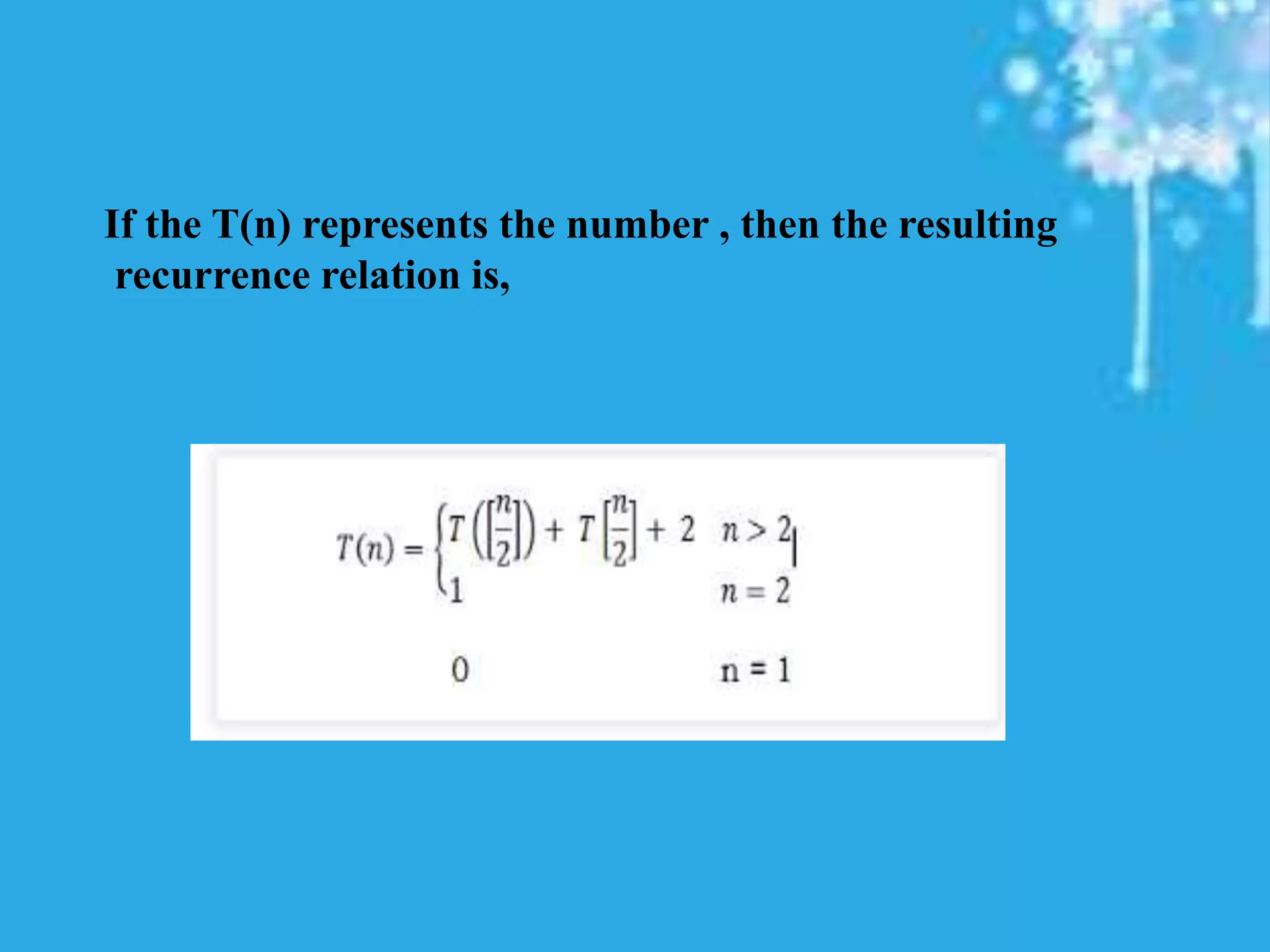
If the T(n)represents the number , then the resulting
recurrence relation is,
![DIVIDE AND CONQUER
PRESENTED BY
M.RAMYA
M.sc[CS&IT]
NADAR SARASWATHI COLLEGE OF ARTS
&SCIENCE,
VADAPUDUPATTI , THENI.](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-1-2048.jpg)
![RECURSIVE BINARY SEARCH
Algorithm BinSrch(a , i , l , x)
{
if(l = i) then
{
if (x = a[i]) then return i;
else return 0;
}
else
{
mid:=[(i+l)/2];
if (x=a[mid]) then return mid;
else if (x < a[mid]) then
return BinSrch(a , i , mid-1 , x );
else return BinSrch(a , mid+1 , l , x);
}
}](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-7-2048.jpg)
![ITERATIVE BINARY SEARCH
Algorithm BinSearch(a , n , x)
{
low:=1; high:=n;
while (low ≤ high) do
{
mid:=[(low + high)/2];
if (x < a[mid]) then high:=mid-1;
else if (x > a[mid]) then low:=mid+1;
else return mid;
}
return 0;
}](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-8-2048.jpg)
![THREE EXAMPLES OF BINARY SEARCH ON 14
ELEMENTS
Example:
Let us consider 14 entries:
-15,-6,0,7,9,23,54,82,101,112,125,131,142,151
• Place them in a[1:14] and simulate the steps that bin search goes through as
it searches for different values of x.
• Only the variables low, high and mid need to be traced as we simulate the
algorithm.
• We try the following values for x: 151,-14,9 for two successful searches
and one unsuccessful search. The traces of these three inputs shows below:
X = 151 low high mid
1 14 7
8 14 11
12 14 13
14 14 14
Found](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-9-2048.jpg)
![BINARY SEARCH USING ONE COMPARSION
PER CYCLE
Algorithm BinSearch1(a , n , x)
{
low:=1;high:=n+1;
while (low<(high-1)) do
{
mid:=[(low+high)/2];
if(x < a[mid]) then high:=mid;
else low:=mid;
}
if (x=a[low]) then return low;
else return 0;
}](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-13-2048.jpg)
![FINDING THE MAXIMUM AND MINIMUM
• The divide and conquer technique. The problem is to find the
maximum and minimum items in a set of n elements.
• More importantly , when the elements in a[1:n] are
polynomials , vectors , very large numbers or strings of
characters , the cost of an element comparison is much higher
than the cost of the other operations. Hence the time is
determined mainly by the total cost of the element
comparisons.](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-15-2048.jpg)
![• StraightMaxMin requires 2(n-1) element comparisons in the
best , average and worst cases. An immediate improvement is
possible by realizing that the comparison a[i] < min is
necessary only when a[i] > max is false. Hence we can replace
the contents of the for loop by
if (a[i] > max) then max:=a[i];
else if (a[i] < min) then min:=a[i];](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-16-2048.jpg)
![STRAIGHTFORWARD MAXIMUM AND
MINIMUM
Algorithm StraightMaxMin(a , n , max , min)
{
max:=min:=a[1];
for i:=2 to n do
{
if (a[i] > max) then max:=a[i];
if (a[i] < min) then min:=a[i];
}
}](https://image.slidesharecdn.com/divideandconquer-180904040959/75/Divide-and-conquer-17-2048.jpg)