The document discusses several topics in mathematics including:
1. Differential equations in the form of Ay" + By′ + cy = g(t) and the general solution to the homogeneous equation Ay" + By′ + cy = 0.
2. Classifications of integrals including singular integrals which are found by eliminating arbitrary constants from an integral equation.
3. Solving the linear equation Pp+Qq=R using Lagrange's method of finding integrals to get the general integral φ(u,v)=0.
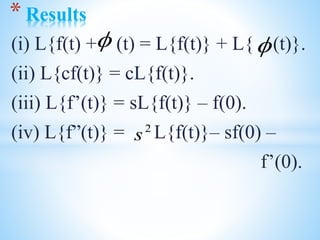
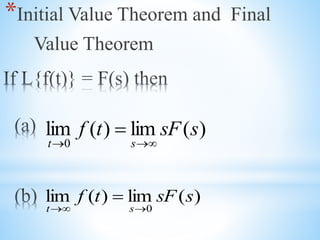
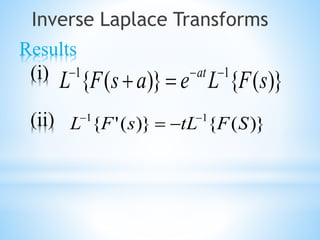
4. The Laplace transform of a function f(t), written as L{f(t)}, and some of its properties including the initial value theorem and final value theorem.