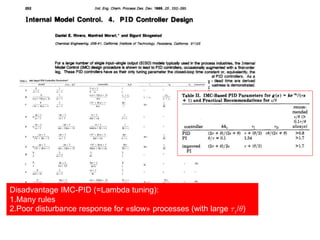
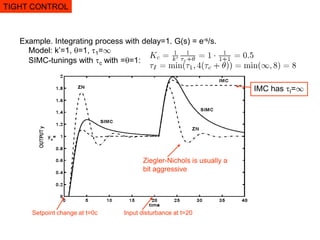
This document discusses PID controller tuning. It begins by outlining the topics that will be covered, including obtaining process models from step responses or detailed models, deriving the SIMC PID tuning rules, and special topics like integrating processes and when derivative action is needed. It then derives the SIMC PID tuning rules, which specify controller gain, integral time, and derivative time based on a process model and desired closed-loop response time. It discusses selecting the response time for tight versus smooth control and provides guidelines for minimum controller gain. Integrating processes require reducing the integral time to avoid oscillations. The document emphasizes that the SIMC rules provide a systematic approach to PID tuning.











![Shams’ method: Closed-loop setpoint response
with P-controller with about 20-40% overshoot
Kc0=1.5
Δys=1
Δyu=0.54
Δyp=0.79
tp=4.4
1. OBTAIN DATA IN RED (first overshoot
and undershoot), and then:
tp=4.4, dyp=0.79; dyu=0.54, Kc0=1.5, dys=1
dyinf = 0.45*(dyp + dyu)
Mo =(dyp -dyinf)/dyinf % Mo=overshoot (about 0.3)
b=dyinf/dys
A = 1.152*Mo^2 - 1.607*Mo + 1.0
r = 2*A*abs(b/(1-b))
%2. OBTAIN FIRST-ORDER MODEL:
k = (1/Kc0) * abs(b/(1-b))
theta = tp*[0.309 + 0.209*exp(-0.61*r)]
tau = theta*r
3. CAN THEN USE SIMC PI-rule
Example 2: Get k=0.99, theta =1.68, tau=3.03
Ref: Shamssuzzoha and Skogestad (JPC, 2010)
+ modification by C. Grimholt (Project, NTNU, 2010; see also PID-book 2012)
Δy∞
MODEL, Approach 1B](https://image.slidesharecdn.com/course4-pid-240306154218-46c5115f/85/Design-of-PID-CONTROLLER-FOR-ENGINEERING-13-320.jpg)






























![1. Application of smooth control
Averaging level control
V
q
LC
Reason for having tank is to smoothen disturbances in concentration and flow.
Tight level control is not desired: gives no “smoothening” of flow disturbances.
SMOOTH CONTROL LEVEL CONTROL
If you insist on integral action
then this value avoids cycling
Proof: 1. Let
|u0| = |q0| – expected flow change [m3/s] (input disturbance)
|ymax| = |Vmax| - largest allowed variation in level [m3]
Minimum controller gain for acceptable disturbance rejection:
Kc ¸ Kc,min = |u0|/|ymax| = |q0| / |Vmax|
2. From the material balance (dV/dt = q – qout), the model is g(s)=k’/s with k’=1.
Select Kc=Kc,min. SIMC-Integral time for integrating process:
I = 4 / (k’ Kc) = 4 |Vmax| / | q0| = 4 ¢ residence time
provided tank is nominally half full and q0 is equal to the nominal flow.](https://image.slidesharecdn.com/course4-pid-240306154218-46c5115f/85/Design-of-PID-CONTROLLER-FOR-ENGINEERING-45-320.jpg)


![How avoid oscillating levels?
LEVEL CONTROL
• S im p le st: U se P -c o n tro l o n ly (n o in te g ra l a c tio n )
• If yo u in s is t o n in te g ra l a c tio n , th e n m a k e su re
th e c o n tro lle r g a in is su ffic ie n tly la rg e
• If yo u h a ve a le ve l lo o p th a t is o sc illa tin g th e n
u se S ig u rd s ru le (c an be d erive d):
T o a vo id o sc illatio ns , inc re as e K c ¢I by fa cto r
f= 0 .1 ¢(P 0/I0)2
w h e re
P 0 = p e rio d o f o sc illatio ns [s ]
I0 = o rig ina l inte gra l tim e [s]
0.1 ¼ 1/2](https://image.slidesharecdn.com/course4-pid-240306154218-46c5115f/85/Design-of-PID-CONTROLLER-FOR-ENGINEERING-48-320.jpg)