Downloaded 53 times




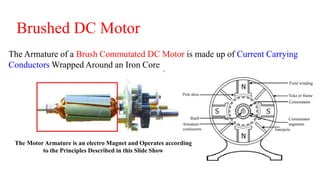












DC motors convert electrical energy into mechanical energy. There are two main types - AC and DC. A DC motor has a stationary magnetic field and an armature that rotates. The interaction between the magnetic field and current in the armature causes it to rotate. DC motors are classified as shunt, series, or compound based on how the field and armature circuits are connected. Shunt motors are constant speed, series motors have high starting torque but variable speed, and compound motors have characteristics of both.




















































































