The document is a comprehensive guide on embedded systems, emphasizing a cyber-physical systems approach. It covers the modeling, design, and analysis of embedded systems, and is aimed at advanced undergraduate students, graduate students, and practicing engineers. The second edition includes new chapters, exercises, and improves upon previous material to better equip readers with the necessary skills in this field.






















![on what that sound design practice is, and on how today’s
technologies both impede and
achieve it.
Lee & Seshia, Introduction to Embedded Systems xiii
http://LeeSeshia.org
PREFACE
Stankovic et al. (2005) support this view, stating that “existing
technology for RTES [real-
time embedded systems] design does not effectively support the
development of reliable
and robust embedded systems.” They cite a need to “raise the
level of programming
abstraction.” We argue that raising the level of abstraction is
insufficient. We also have
to fundamentally change the abstractions that are used. Timing
properties of software,
for example, cannot be effectively introduced at higher levels of
abstraction if they are
entirely absent from the lower levels of abstraction on which
these are built.
We require robust and predictable designs with repeatable
temporal dynamics (Lee, 2009a).
We must do this by building abstractions that appropriately
reflect the realities of cyber-
physical systems. The result will be CPS designs that can be
much more sophisticated,
including more adaptive control logic, evolvability over time,
and improved safety and re-
liability, all without suffering from the brittleness of today’s
designs, where small changes](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-23-320.jpg)




![In addition, we have provided an extensive index, with more
than 2,000 entries.
There are typographic conventions worth noting. When a term is
being defined, it will ap-
pear in bold face, and the corresponding index entry will also be
in bold face. Hyperlinks
are shown in blue in the electronic version. The notation used in
diagrams, such as those
for finite-state machines, is intended to be familiar, but not to
conform with any particular
programming or modeling language.
Intended Audience
This book is intended for students at the advanced
undergraduate level or introductory
graduate level, and for practicing engineers and computer
scientists who wish to under-
stand the engineering principles of embedded systems. We
assume that the reader has
some exposure to machine structures (e.g., should know what an
ALU is), computer pro-
gramming (we use C throughout the text), basic discrete
mathematics and algorithms, and
at least an appreciation for signals and systems (what it means
to sample a continuous-
time signal, for example).
Reporting Errors
If you find errors or typos in this book, or if you have
suggestions for improvements or
other comments, please send email to:
[email protected]](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-28-320.jpg)
![Please include the version number of the book, whether it is the
electronic or the hard-
copy distribution, and the relevant page numbers. Thank you!
Lee & Seshia, Introduction to Embedded Systems xvii
mailto:[email protected]
http://LeeSeshia.org
PREFACE
Acknowledgments
The authors gratefully acknowledge contributions and helpful
suggestions from Murat
Arcak, Dai Bui, Janette Cardoso, Gage Eads, Stephen Edwards,
Suhaib Fahmy, Shanna-
Shaye Forbes, Daniel Holcomb, Jeff C. Jensen, Garvit Juniwal,
Hokeun Kim, Jonathan
Kotker, Wenchao Li, Isaac Liu, Slobodan Matic, Mayeul
Marcadella, Le Ngoc Minh,
Christian Motika, Chris Myers, Steve Neuendorffer, David
Olsen, Minxue Pan, Hiren Pa-
tel, Jan Reineke, Rhonda Righter, Alberto Sangiovanni-
Vincentelli, Chris Shaver, Shih-
Kai Su (together with students in CSE 522, lectured by Dr.
Georgios E. Fainekos at
Arizona State University), Stavros Tripakis, Pravin Varaiya,
Reinhard von Hanxleden,
Armin Wasicek, Kevin Weekly, Maarten Wiggers, Qi Zhu, and
the students in UC Berke-
ley’s EECS 149 class over the past years, particularly Ned Bass
and Dan Lynch. The
authors are especially grateful to Elaine Cheong, who carefully
read most chapters and](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-29-320.jpg)



![http://leeseshia.org
In addition, a solutions manual and other instructional material
are available to qualified
instructors at bona fide teaching institutions. See
http://chess.eecs.berkeley.edu/instructors/
or contact [email protected]
xx Lee & Seshia, Introduction to Embedded Systems
http://leeseshia.org
http://chess.eecs.berkeley.edu/instructors/
mailto:[email protected]
http://LeeSeshia.org
1
Introduction
1.1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
Sidebar: About the Term “Cyber-Physical Systems” . . . . . . . . .
. 5
1.2 Motivating Example . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 The Design Process . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.1 Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.2 Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.3 Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
A cyber-physical system (CPS) is an integration of computation
with physical processes](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-33-320.jpg)

































![where F is the force vector in three directions, M is the mass of
the object, and ẍ is the
second derivative of x with respect to time (i.e., the
acceleration). Velocity is the integral
1If the notation is unfamiliar, see Appendix A.
2The domain of a continuous-time signal may be restricted to a
connected subset of R, such as R+, the
non-negative reals, or [0, 1], the interval between zero and one,
inclusive. The codomain may be an arbitrary
set, though when representing physical quantities, real numbers
are most useful.
20 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
2. CONTINUOUS DYNAMICS
of acceleration, given by
∀ t > 0, ẋ(t) = ẋ(0) +
t∫
0
ẍ(τ)dτ
where ẋ(0) is the initial velocity in three directions. Using
(2.1), this becomes
∀ t > 0, ẋ(t) = ẋ(0) + 1
M](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-67-320.jpg)










































































































![state variables of the free mode are
s(t) =
[
y(t)
ẏ(t)
]
with the initial conditions y(0) = h0 and ẏ(0) = 0. It is then a
simple matter to
rewrite (4.4) as a first-order differential equation,
ṡ(t) = f(s(t)) (4.5)
for a suitably chosen function f .
At the time t = t1 when the ball first hits the ground, the guard
y(t) = 0
is satisfied, and the self-loop transition is taken. The output
bump is produced,
and the set action ẏ(t) := −aẏ(t) changes ẏ(t1) to have value
−aẏ(t1). Then
(4.4) is followed again until the guard becomes true again.
92 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
4. HYBRID SYSTEMS
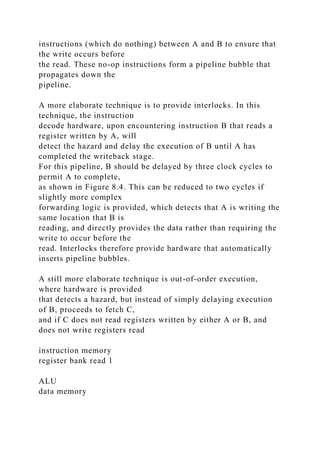
t1 t2](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-176-320.jpg)



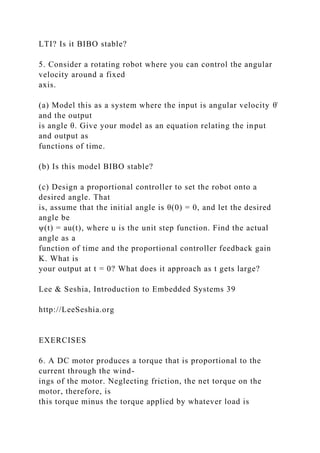
![Let (x(t), y(t)) ∈ R2 be the position relative to some fixed
coordinate frame and
θ(t) ∈ (−π, π] be the angle (in radians) of the vehicle at time t,
as shown in
Figure 4.12. In terms of this coordinate frame, the motion of the
vehicle is given
94 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
4. HYBRID SYSTEMS
track
AG
V
global
coordinate
frame
Figure 4.12: Illustration of the automated guided vehicle of
Example 4.8. The
vehicle is following a curved painted track, and has deviated
from the track by a
distance e(t). The coordinates of the vehicle at time t with
respect to the global
coordinate frame are (x(t), y(t), θ(t)).
by a system of three differential equations,
ẋ(t) = u(t) cos θ(t),](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-180-320.jpg)































































































































































































































































![programmer needs to be
very careful with dynamic memory allocation, particularly for
embedded systems that are
expected to run for a very long time. Exhausting the available
memory can cause system
crashes or other undesired behavior.
256 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
9. MEMORY ARCHITECTURES
Exercises
1. Consider the function compute variance listed below, which
computes the
variance of integer numbers stored in the array data.
1 int data[N];
2
3 int compute_variance() {
4 int sum1 = 0, sum2 = 0, result;
5 int i;
6
7 for(i=0; i < N; i++) {
8 sum1 += data[i];
9 }
10 sum1 /= N;
11
12 for(i=0; i < N; i++) {](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-441-320.jpg)
![13 sum2 += data[i] * data[i];
14 }
15 sum2 /= N;
16
17 result = (sum2 - sum1*sum1);
18
19 return result;
20 }
Suppose this program is executing on a 32-bit processor with a
direct-mapped cache
with parameters (m,S,E,B) = (32, 8, 1, 8). We make the
following additional
assumptions:
• An int is 4 bytes wide.
• sum1, sum2, result, and i are all stored in registers.
• data is stored in memory starting at address 0x0.
Answer the following questions:
(a) Consider the case where N is 16. How many cache misses
will there be?
(b) Now suppose that N is 32. Recompute the number of cache
misses.
(c) Now consider executing for N = 16 on a 2-way set-
associative cache with
parameters (m,S,E,B) = (32, 8, 2, 4). In other words, the block
size is
halved, while there are two cache lines per set. How many cache
misses
would the code suffer?](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-442-320.jpg)


















![3 UDR0 = x[i];
268 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
10. INPUT AND OUTPUT
4 }
How long would it take to execute this code? Suppose that the
serial port is set
to operate at 57600 baud, or bits per second (this is quite fast
for an RS-232
interface). Then after loading UDR0 with an 8-bit value, it will
take 8/57600
seconds or about 139 microseconds for the 8-bit value to be
sent. Suppose that
the frequency of the processor is operating at 18 MHz
(relatively slow for a mi-
crocontroller). Then except for the first time through the for
loop, each while
loop will need to consume approximately 2500 cycles, during
which time the
processor is doing no useful work.
To receive a byte over the serial port, a programmer may use
the following C
code:
1 while(!(UCSR0A & 0x80));
2 return UDR0;
In this case, the while loop waits until the UART has received
an incoming](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-461-320.jpg)























![The emphasis is on un-
derstanding the principles behind the mechanisms, with a
particular focus on the bridging
between the sequential world of software and the parallel
physical world.
Lee & Seshia, Introduction to Embedded Systems 283
http://LeeSeshia.org
EXERCISES
Exercises
1. Similar to Example 10.6, consider a C program for an Atmel
AVR that uses a UART
to send 8 bytes to an RS-232 serial interface, as follows:
1 for(i = 0; i < 8; i++) {
2 while(!(UCSR0A & 0x20));
3 UDR0 = x[i];
4 }
Assume the processor runs at 50 MHz; also assume that initially
the UART is idle,
so when the code begins executing, UCSR0A & 0x20 == 0x20 is
true; further,
assume that the serial port is operating at 19,200 baud. How
many cycles are re-
quired to execute the above code? You may assume that the for
statement executes
in three cycles (one to increment i, one to compare it to 8, and
one to perform the
conditional branch); the while statement executes in 2 cycles
(one to compute](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-485-320.jpg)




































































































































![6 desired_climb
7 = pre_climb + altitude_pgain * err;
8 if (desired_climb < -CLIMB_MAX) {
9 desired_climb = -CLIMB_MAX;
10 }
11 if (desired_climb > CLIMB_MAX) {
12 desired_climb = CLIMB_MAX;
13 }
14 }
15 }
16 }
For this example, it is required that the value of the desired
climb vari-
able at the end of altitude control task remains within the range
[-
CLIMB MAX, CLIMB MAX]. This is an example of a special
kind of invariant, a
postcondition, that must be maintained every time altitude
control task
returns. Determining whether this is the case requires analyzing
the control flow
of the program.
Lee & Seshia, Introduction to Embedded Systems 361
http://LeeSeshia.org
13.2. LINEAR TEMPORAL LOGIC
13.2 Linear Temporal Logic
We now give a formal description of temporal logic and
illustrate with examples of how](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-620-320.jpg)
































































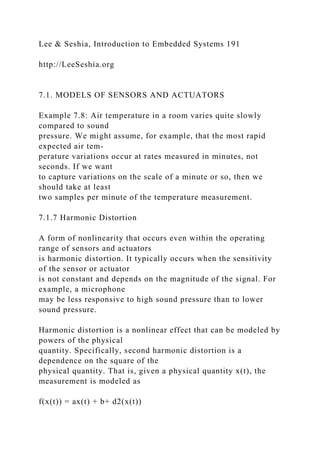
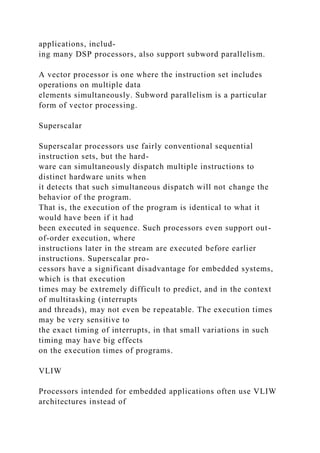
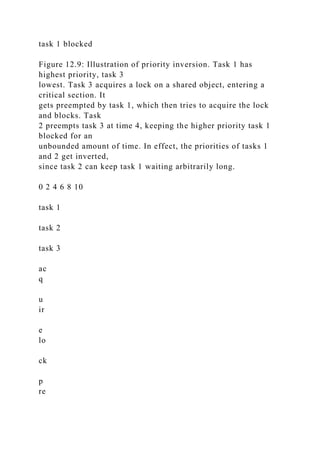
![Compose Verify
Property
System
Environment
YES
[proof]
NO
counterexample
M
Figure 15.2: Formal verification procedure.
• The property to be verified Φ.
The verifier generates as output a YES/NO answer, indicating
whether or not S satisfies
the property Φ in environment E. Typically, a NO output is
accompanied by a counterex-
ample, also called an error trace, which is a trace of the system
that indicates how Φ is
violated. Counterexamples are very useful aids in the debugging
process. Some formal
verification tools also include a proof or certificate of
correctness with a YES answer;
such an output can be useful for certification of system
correctness.
The form of composition used to combine system model S with
environment model E](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-686-320.jpg)



















































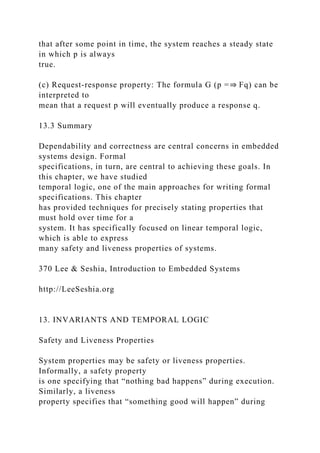
![termination – by defining a progress measure or ranking
function that maps each state
of the program to a mathematical structure called a well order.
Intuitively, a well order is
like a program that counts down to zero from some initial value
in the natural numbers.
16.3.2 Exponential Path Space
Execution time is a path property. In other words, the amount of
time taken by the pro-
gram is a function of how conditional statements in the program
evaluate to true or false.
A major source of complexity in execution time analysis (and
other program analysis
problems as well) is that the number of program paths can be
very large — exponential in
the size of the program. We illustrate this point with the
example below.
Example 16.6: Consider the function count listed below, which
runs over
a two-dimensional array, counting and accumulating non-
negative and negative
elements of the array separately.
1 #define MAXSIZE 100
2
3 int Array[MAXSIZE][MAXSIZE];
4 int Ptotal, Pcnt, Ntotal, Ncnt;
5 ...
6 void count() {
7 int Outer, Inner;
8 for (Outer = 0; Outer < MAXSIZE; Outer++) {
9 for (Inner = 0; Inner < MAXSIZE; Inner++) {](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-738-320.jpg)
![10 if (Array[Outer][Inner] >= 0) {
11 Ptotal += Array[Outer][Inner];
438 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
16. QUANTITATIVE ANALYSIS
12 Pcnt++;
13 } else {
14 Ntotal += Array[Outer][Inner];
15 Ncnt++;
16 }
17 }
18 }
19 }
The function includes a nested loop. Each loop executes
MAXSIZE (100) times.
Thus, the inner body of the loop (comprising lines 10–16) will
execute 10,000
times – as many times as the number of elements of Array. In
each iteration of
the inner body of the loop, the conditional on line 10 can either
evaluate to true or
false, thus resulting in 210000 possible ways the loop can
execute. In other words,
this program has 210000 paths.
Fortunately, as we will see in Section 16.4.1, one does not need
to explicitly enumerate
all possible program paths in order to perform execution time
analysis.](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-739-320.jpg)



![4 for(i=0; i < n; i++) {
5 result += x[i] * y[i];
6 }
7 return result;
8 }
Suppose this program is executing on a 32-bit processor with a
direct-mapped
cache. Suppose also that the cache can hold two sets, each of
which can hold 4
floats. Finally, let us suppose that x and y are stored
contiguously in memory
starting with address 0.
Let us first consider what happens if n = 2. In this case, the
entire arrays x and
y will be in the same block and thus in the same cache set.
Thus, in the very
first iteration of the loop, the first access to read x[0] will be a
cache miss, but
thereafter every read to x[i] and y[i] will be a cache hit,
yielding best case
performance for loads.
Consider next what happens when n = 8. In this case, each x[i]
and y[i] map
to the same cache set. Thus, not only will the first access to
x[0] be a miss, the
first access to y[0] will also be a miss. Moreover, the latter
access will evict
the block containing x[0]-x[3], leading to a cache miss on x[1],
x[2], and
x[3] as well. The reader can see that every access to an x[i] or
y[i] will
lead to a cache miss.](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-743-320.jpg)























![Vienna M./P. Measurement Technical University of Vienna
http://www.wcet.at/
454 Lee & Seshia, Introduction to Embedded Systems
http://www.absint.com/ait/
http://www.bound-t.com/
http://www.comp.nus.edu.sg/~rpembed/chronos/
http://www.irisa.fr/aces/work/heptane-demo/heptane.html
http://www.mrtc.mdh.se/projects/wcet/
http://www.rapitasystems.com/
http://www.ida.ing.tu-bs.de/research/projects/symtap/
http://www.wcet.at/
http://LeeSeshia.org
16. QUANTITATIVE ANALYSIS
Exercises
1. This problem studies execution time analysis. Consider the C
program listed below:
1 int arr[100];
2
3 int foo(int flag) {
4 int i;
5 int sum = 0;
6
7 if (flag) {
8 for(i=0;i<100;i++)
9 arr[i] = i;
10 }](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-767-320.jpg)
![11
12 for(i=0;i<100;i++)
13 sum += arr[i];
14
15 return sum;
16 }
Assume that this program is run on a processor with data cache
of size big enough
that the entire array arr can fit in the cache.
(a) How many paths does the function foo of this program have?
Describe what
they are.
(b) Let T denote the execution time of the second for loop in the
program. How
does executing the first for loop affect the value of T ? Justify
your answer.
2. Consider the program given below:
1 void testFn(int *x, int flag) {
2 while (flag != 1) {
3 flag = 1;
4 *x = flag;
5 }
6 if (*x > 0)
7 *x += 2;
8 }
In answering the questions below, assume that x is not NULL.
(a) Draw the control-flow graph of this program. Identify the](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-768-320.jpg)

![function. Iden-
tify the basic blocks whose execution time will be impacted by
this modified
assumption.
3. Consider the function check password given below that takes
two arguments: a
user ID uid and candidate password pwd (both modeled as ints
for simplicity).
This function checks that password against a list of user IDs and
passwords stored
in an array, returning 1 if the password matches and 0
otherwise.
1 struct entry {
2 int user;
3 int pass;
4 };
5 typedef struct entry entry_t;
6
7 entry_t all_pwds[1000];
8
9 int check_password(int uid, int pwd) {
10 int i = 0;
11 int retval = 0;
12
13 while(i < 1000) {
14 if (all_pwds[i].user == uid && all_pwds[i].pass == pwd) {
15 retval = 1;
16 break;
17 }
18 i++;
19 }](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-770-320.jpg)


































![17. SECURITY AND PRIVACY
the absence of automatic bounds-checking for accessing arrays
or pointers in C programs.
More precisely, a buffer overflow is a error arising from the
absence of a bounds check
resulting in the program writing past the end of an array or
memory region. Attackers can
use this out-of-bounds write to corrupt trusted locations in a
program such as the value
of a secret variable or the return address of a function. (Tip:
material in Chapter 9 on
Memory Architectures might be worth reviewing.) Let us begin
with a simple example.
Example 17.2: The sensors in certain embedded systems use
communication
protocols where data from various on-board sensors is read as a
stream of bytes
from a designated port or network socket. The code example
below illustrates one
such scenario. Here, the programmer expects to read at most 16
bytes of sensor
data, storing them into the array sensor data.
1 char sensor_data[16];
2 int secret_key;
3
4 void read_sensor_data() {
5 int i = 0;
6
7 // more_data returns 1 if there is more data,](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-806-320.jpg)
![8 // and 0 otherwise
9 while(more_data()) {
10 sensor_data[i] = get_next_byte();
11 i++;
12 }
13
14 return;
15 }
The problem with this code is that it implicitly trusts the sensor
stream to be no
more than 16 bytes long. Suppose an attacker has control of that
stream, either
through physical access to the sensors or over the network.
Then an attacker can
provide more than 16 bytes and cause the program to write past
the end of the
array sensor data. Notice further how the variable secret key is
defined
right after sensor data, and assume that the compiler allocates
them adja-
cently. In this case, an attacker can exploit the buffer oveflow
vulnerability to
provide a stream of length 20 bytes and overwrite secret key
with a key of
his choosing. This exploit can then be used to compromise the
system in other
ways.
Lee & Seshia, Introduction to Embedded Systems 475
http://LeeSeshia.org](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-807-320.jpg)
![17.3. SOFTWARE SECURITY
The example above involves an out-of-bounds write in an array
stored in global memory.
Consider next the case when the array is stored on the stack. In
this case, a buffer overrun
vulnerability can be exploited to overwrite the return address of
the function, and cause it
to execute some code of the attacker’s choosing. This can lead
to the attacker gaining an
arbitrary level of control over the embedded system.
Example 17.3: Consider below a variant on the code in Example
17.2 where
the sensor data array is stored on the stack. As before, the
function reads
a stream of bytes and stores them into sensor data. However, in
this case,
the read sensor data is then processed within this function and
used to set certain
globally-stored flags (which can then be used to take control
decisions).
1 int sensor_flags[4];
2
3 void process_sensor_data() {
4 int i = 0;
5 char sensor_data[16];
6
7 // more_data returns 1 if there is more data,
8 // and 0 otherwise
9 while(more_data()) {
10 sensor_data[i] = get_next_byte();](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-808-320.jpg)







![4
5 float stored_readings[100];
6
7 void show_readings() {
480 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
17. SECURITY AND PRIVACY
8 int input_pwd = read_input(); // prompt user for
9 // password and read it
10 if (input_pwd == patient_pwd) // check password
11 display(&stored_readings);
12 else
13 display_error_mesg();
14
15 return;
16 }
Assuming the attacker does not know the value of patient pwd,
we can see
that the above code does not leak any of the 100 stored
readings. However, it
does leak one bit of information: whether the input password
provided by the
attacker equals the correct password or not. In practice, such a
leak is deemed
acceptable since, for a strong choice of patient password, it
would take even the](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-817-320.jpg)


















![rity and side-channel attacks.
490 Lee & Seshia, Introduction to Embedded Systems
http://LeeSeshia.org
17. SECURITY AND PRIVACY
Exercises
1. Consider the buffer overflow vulnerability in Example 17.2.
Modify the code so as
to prevent the buffer overflow.
2. Suppose a system M has a secret input s, a public input x, and
a public output z.
Let all three variables be Boolean. Answer the following
TRUE/FALSE questions
with justification:
(a) Suppose M satisfies the linear temporal logic (LTL) property
G¬z. Then M
must also satisfy observational determinism.
(b) Suppose M satisfies the linear temporal logic (LTL)
property G [(s ∧ x) ⇒ z].
Then M must also satisfy observational determinism.
3. Consider the finite-state machine below with one input x and
one output z, both
taking values in {0, 1}. Both x and z are considered public
(“low”) signals from a
security viewpoint. However, the state of the FSM (i.e., “A” or
“B”) is considered
secret (“high”).](https://image.slidesharecdn.com/introductiontoembeddedsystemsacyber-phys-221018140152-214d1924/85/INTRODUCTION-TO-EMBEDDED-SYSTEMSA-CYBER-PHYS-docx-836-320.jpg)