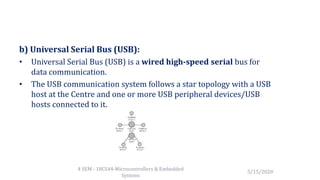
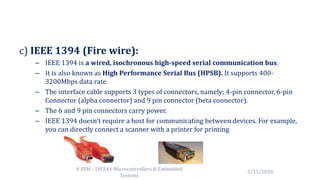
The document discusses various onboard and external communication interfaces used in microcontroller systems. Onboard interfaces include I2C, SPI, UART, 1-Wire, and parallel interfaces. External interfaces include RS-232, USB, FireWire, IrDA, Bluetooth, Wi-Fi, and ZigBee. For each interface, the document describes the basic working, typical applications, advantages and limitations.




































![Communication_Protocols[2][1].pptx on protocoals](https://cdn.slidesharecdn.com/ss_thumbnails/communicationprotocols21-250429164707-38355411-thumbnail.jpg?width=640&height=640&fit=bounds)