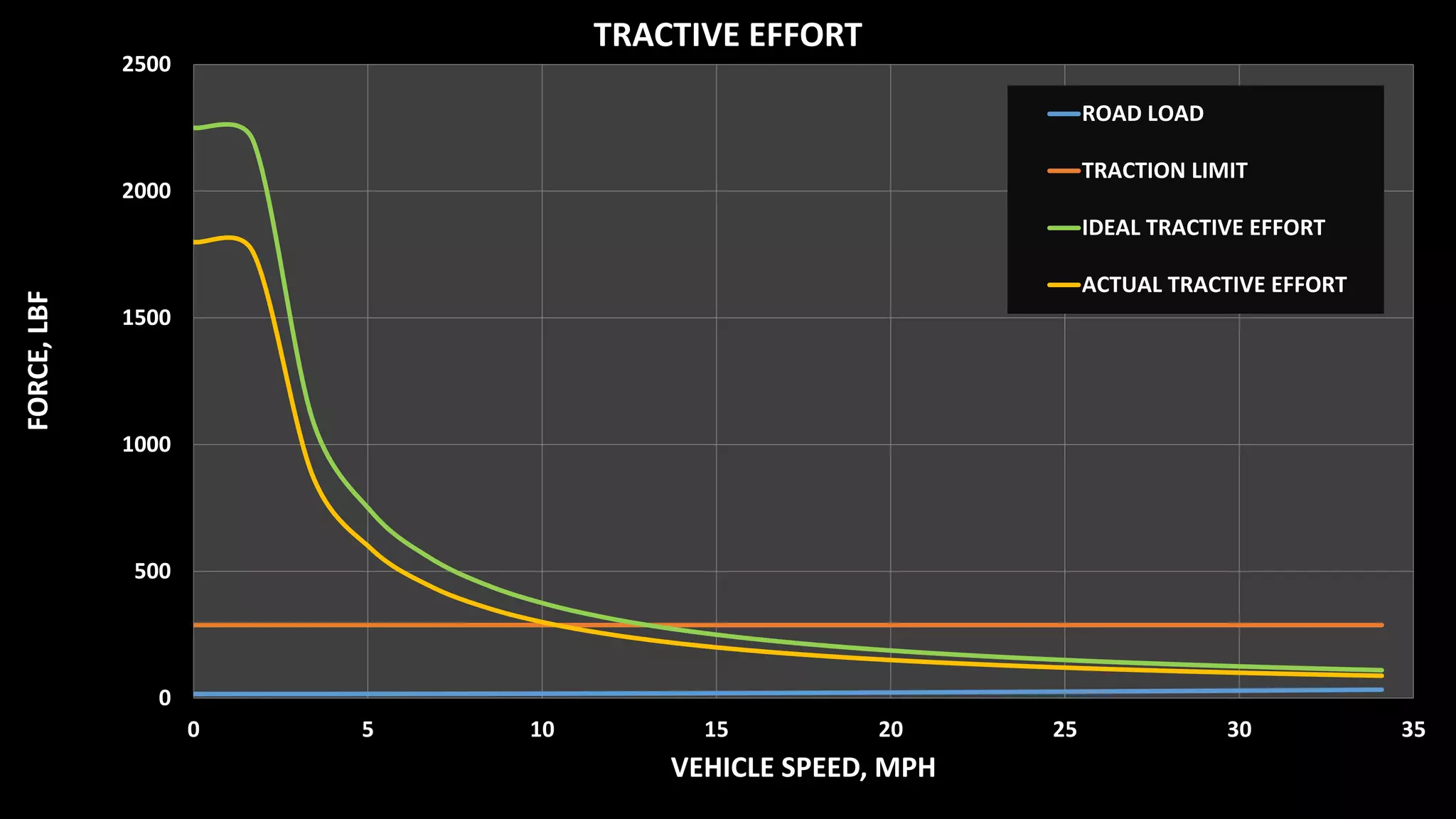
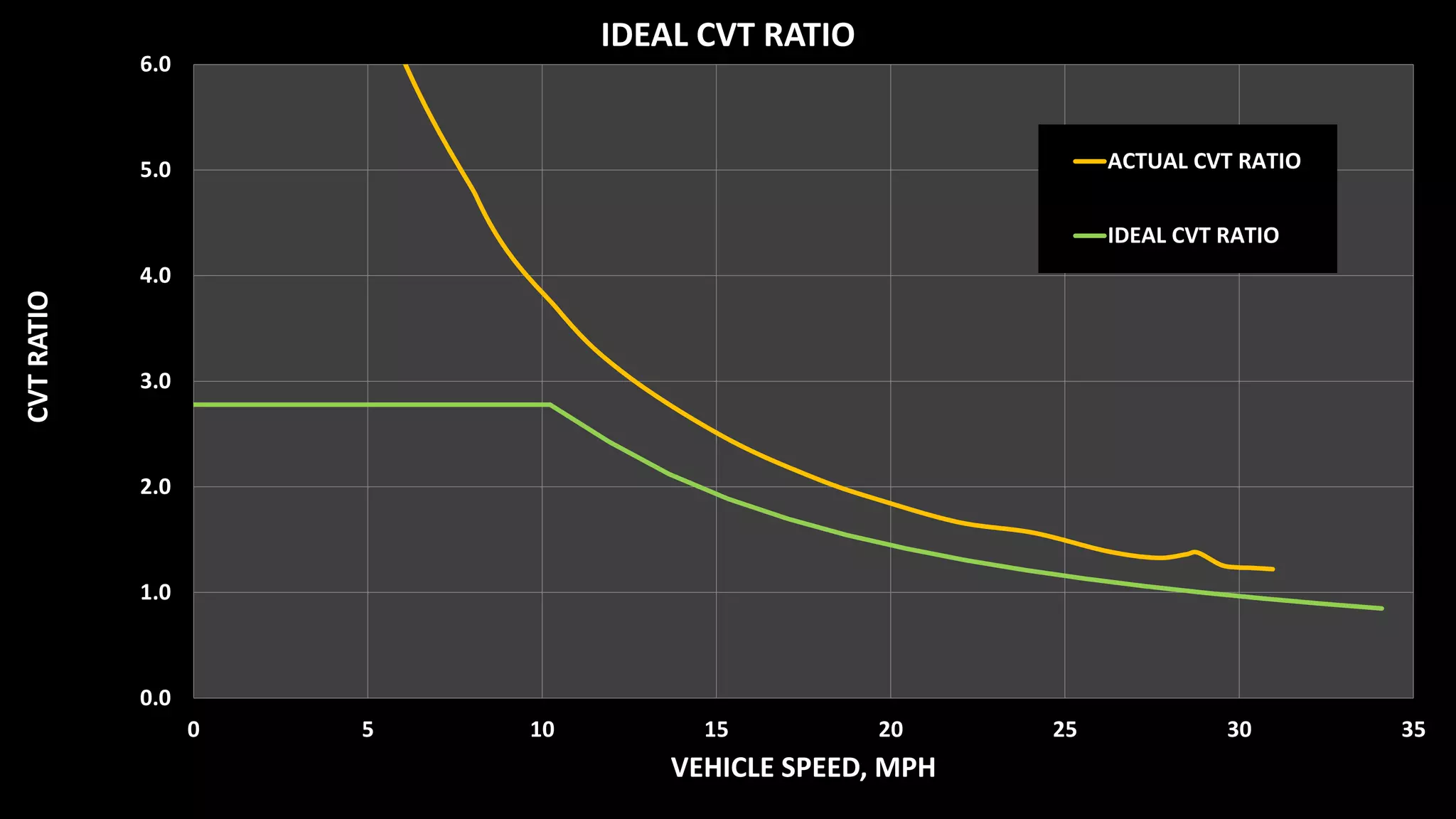
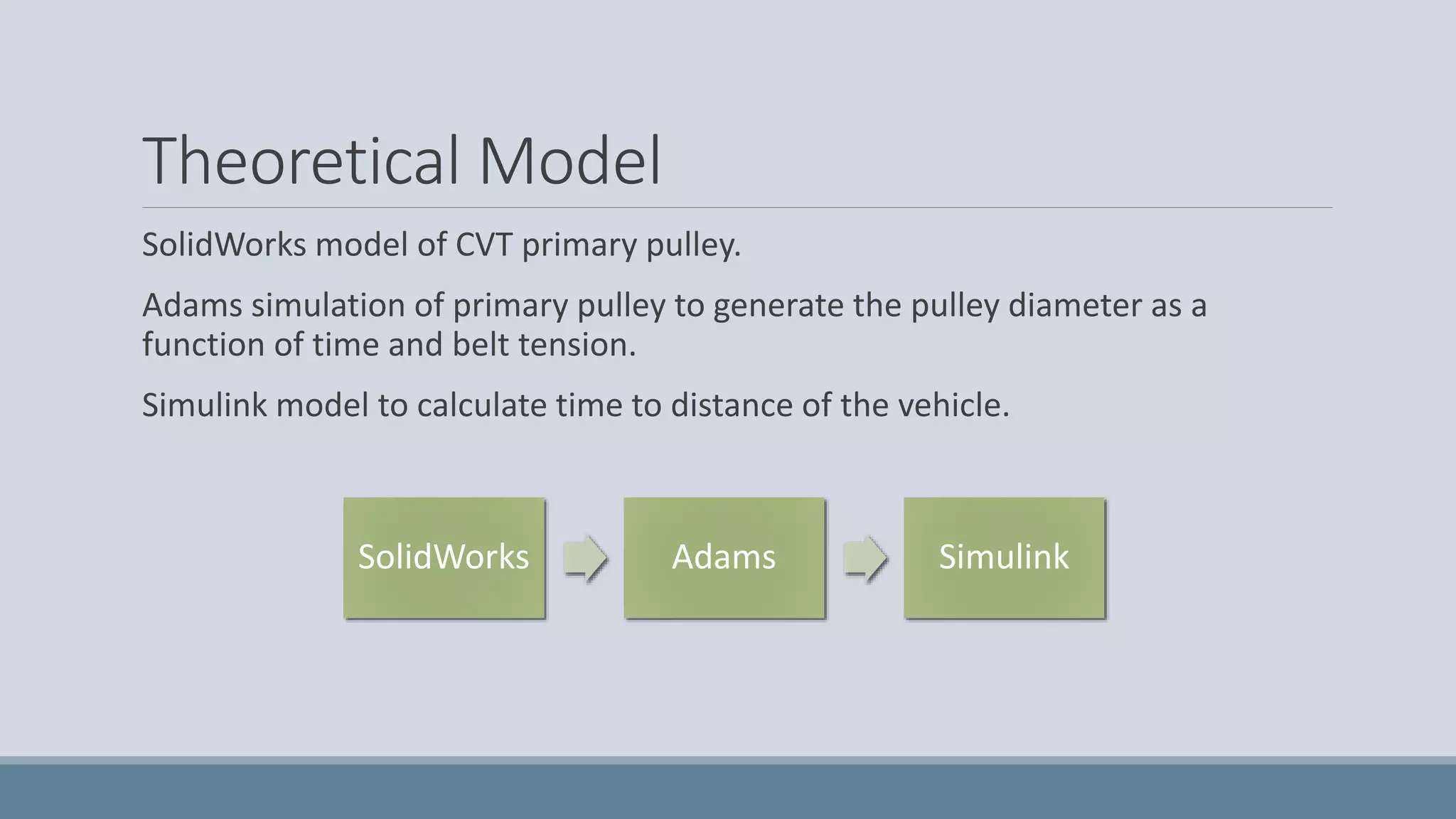
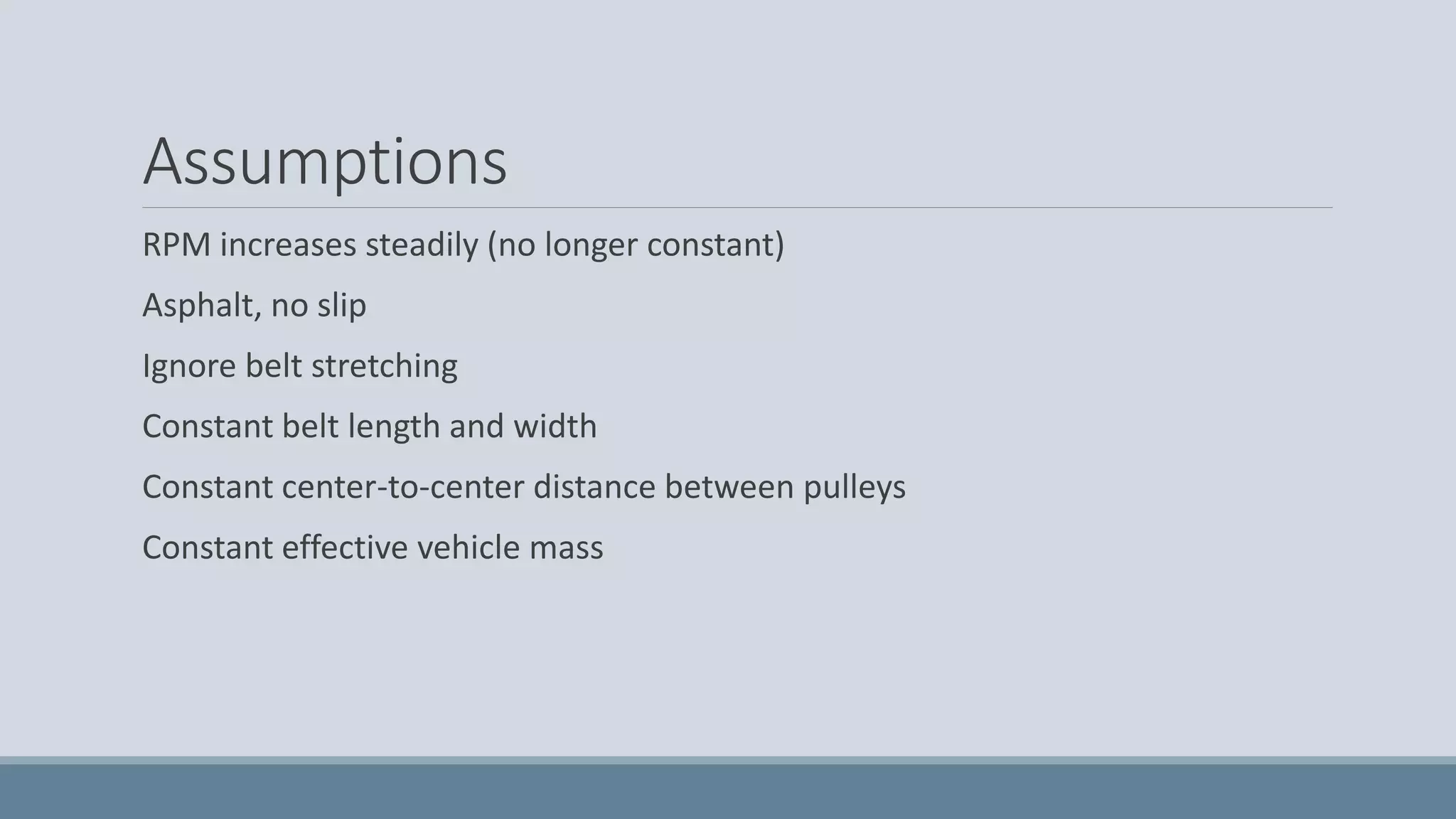
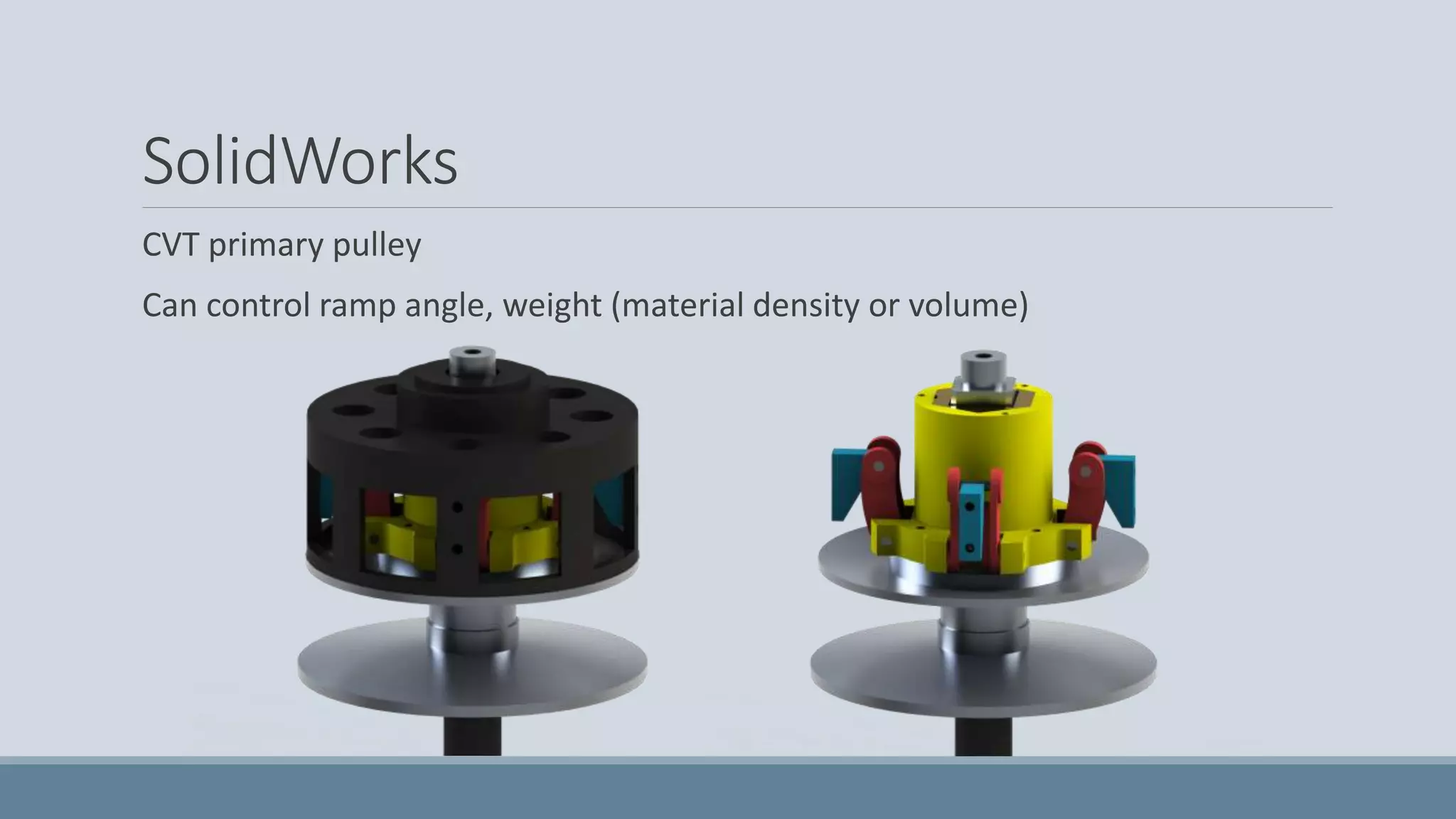
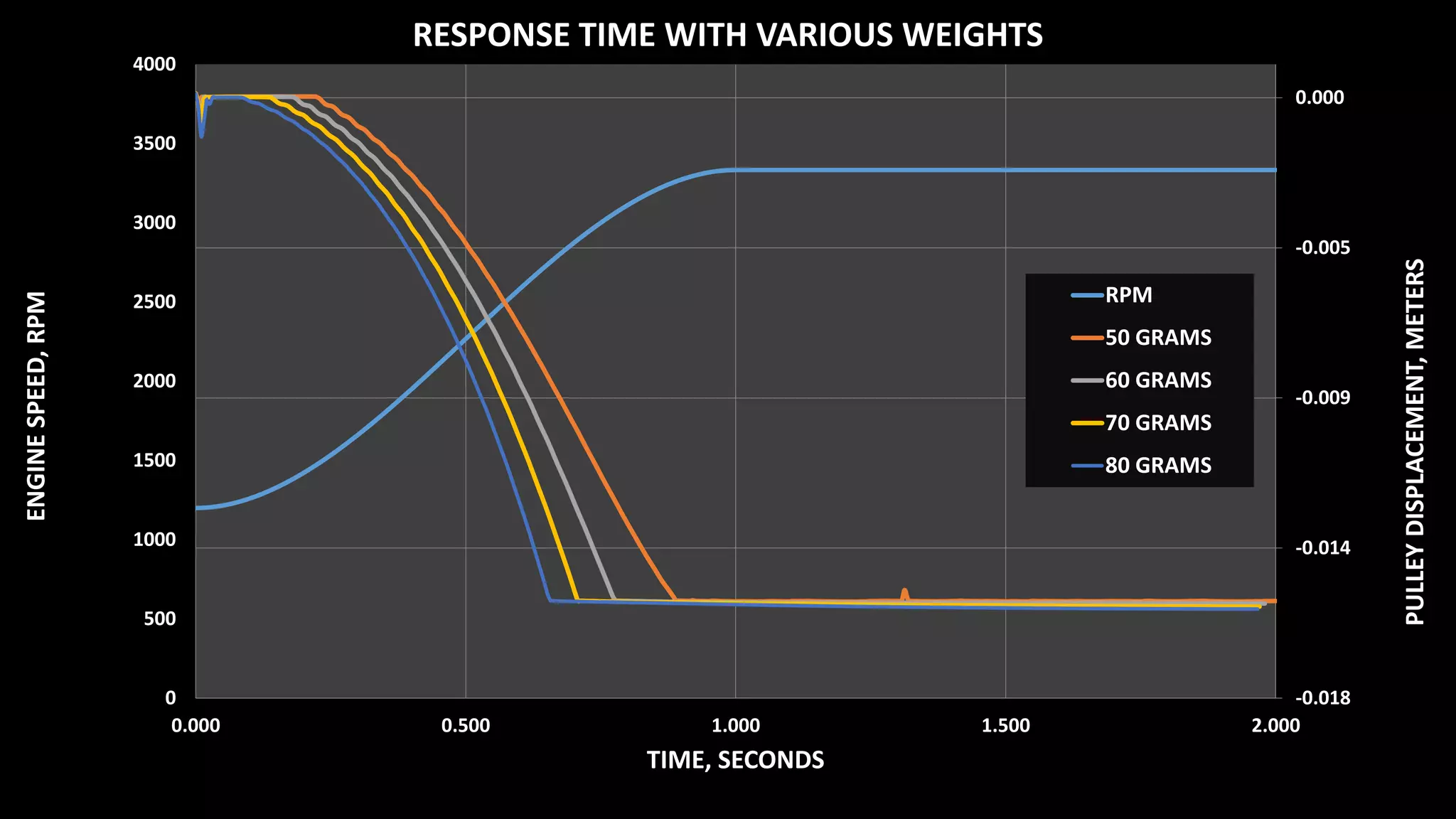
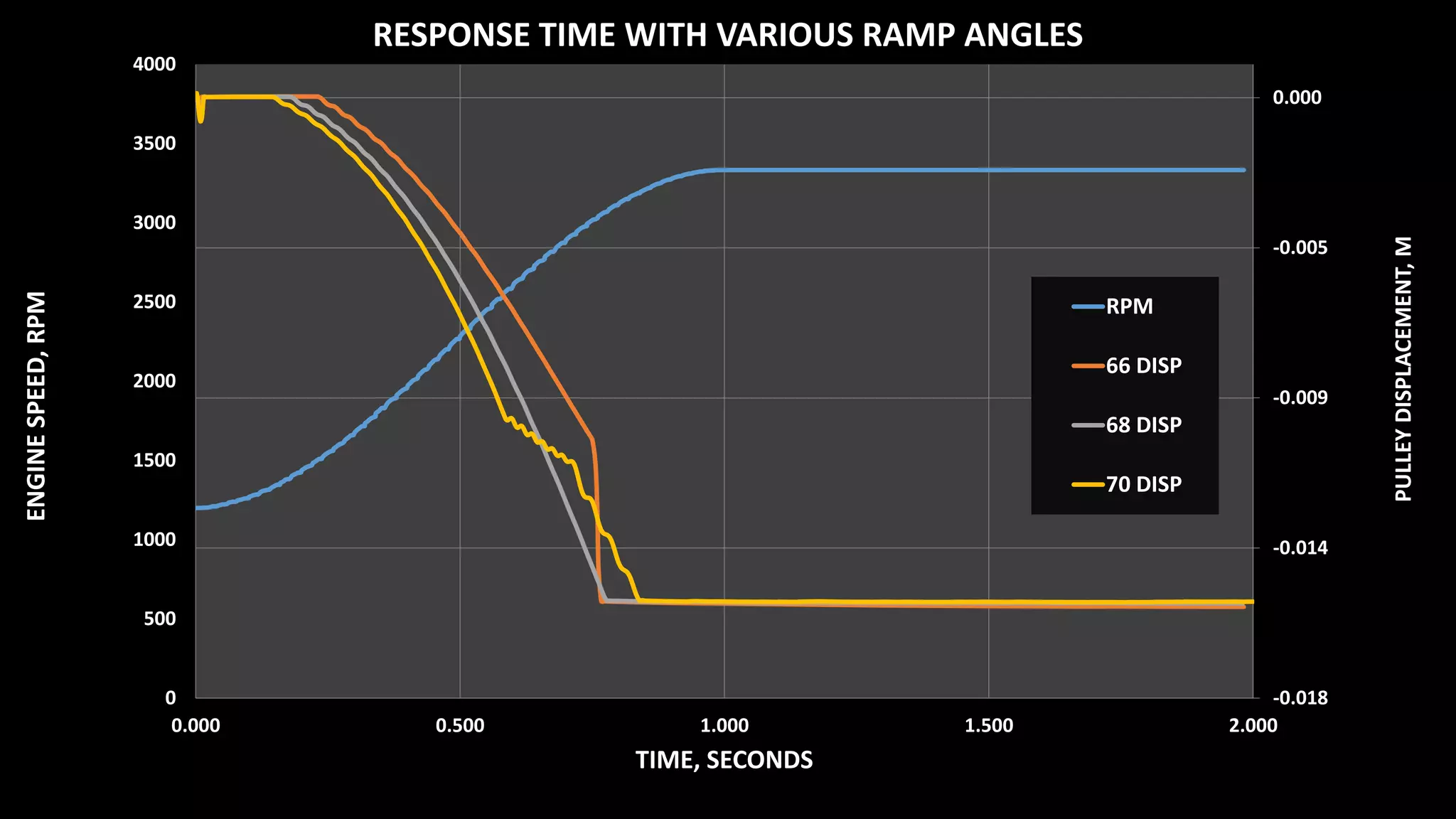
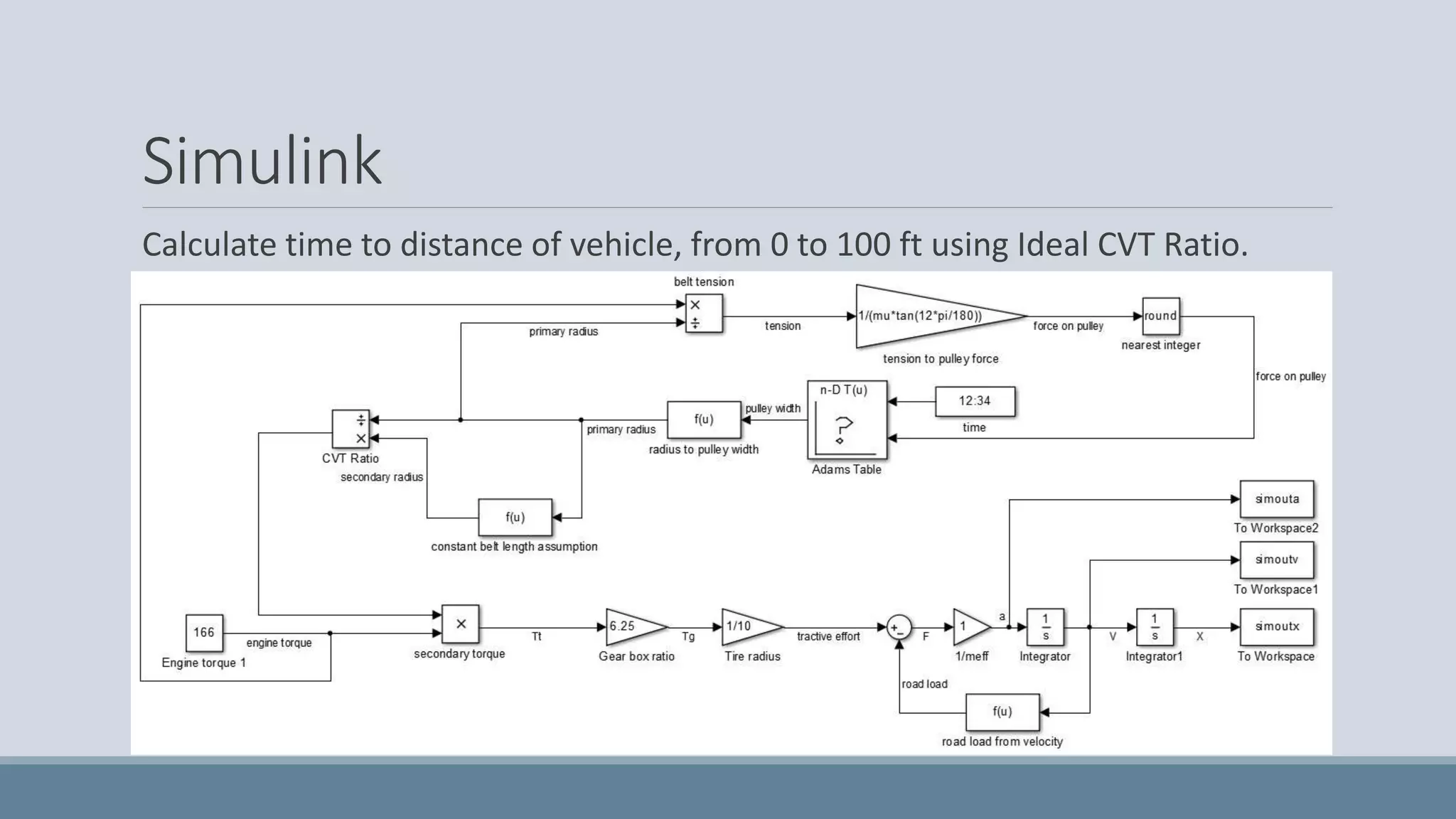
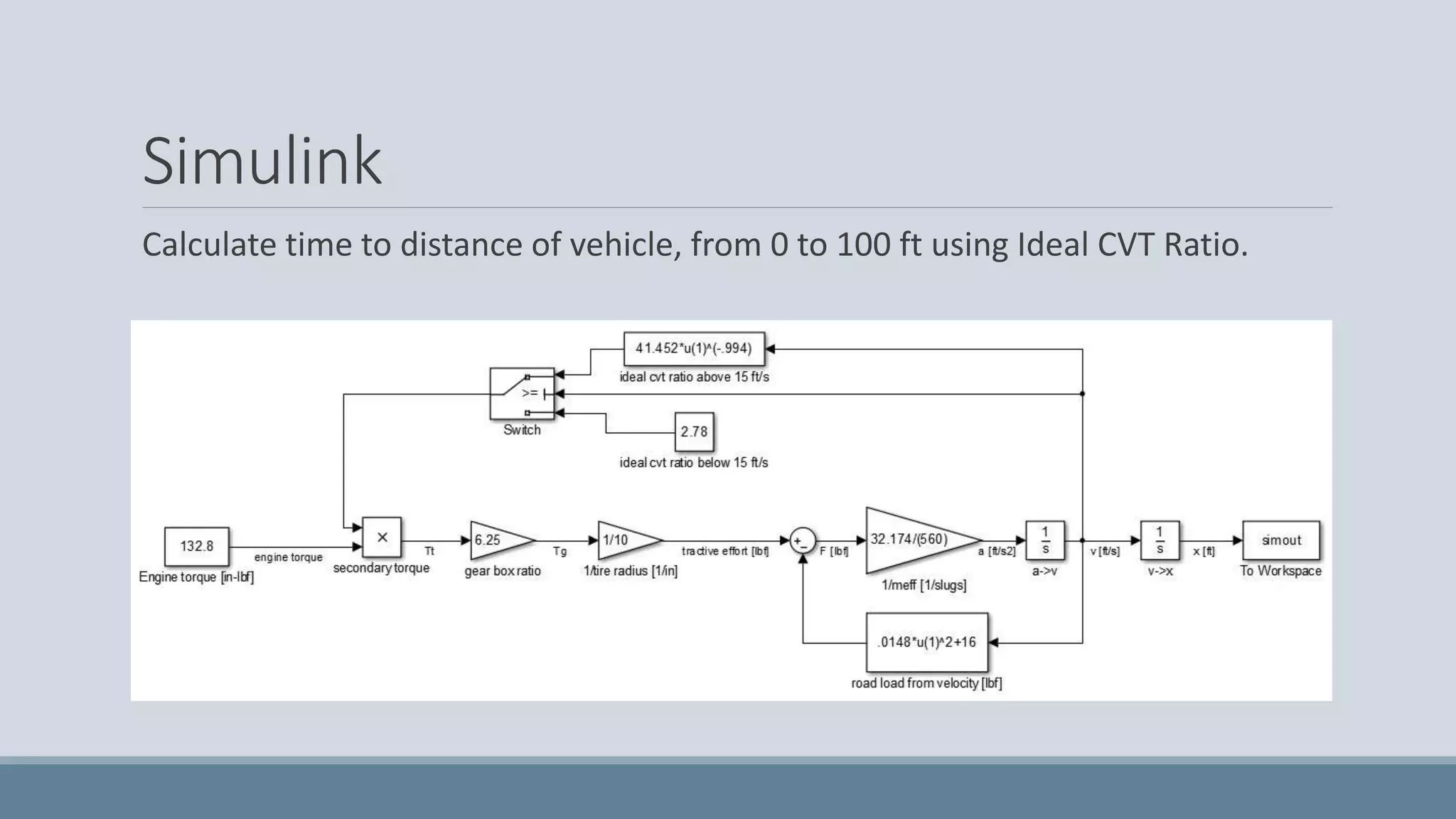
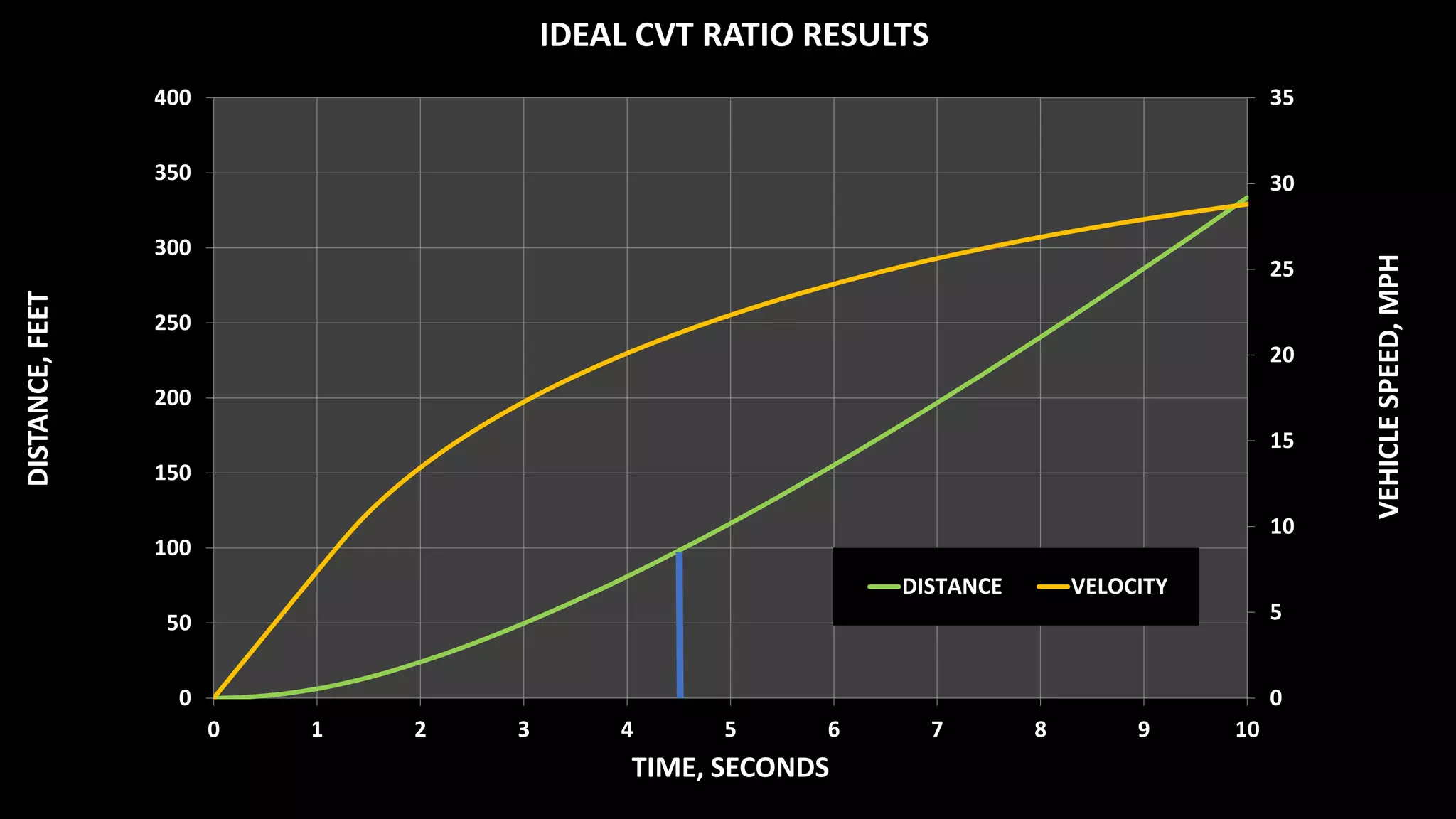
The team created theoretical models of the continuously variable transmission (CVT) on the Cal Poly Baja car to improve performance. Their Adams model showed that increasing weight on the primary pulley results in faster expansion and quicker response time. Their Simulink model calculated that using the ideal CVT ratio would reduce the 0-100 ft time to under 5 seconds, improving their acceleration time by over 10%. Testing different ramp angles on the primary pulley also showed potential for obtaining the ideal ratio. Experimental validation was recommended over relying solely on analytical models.


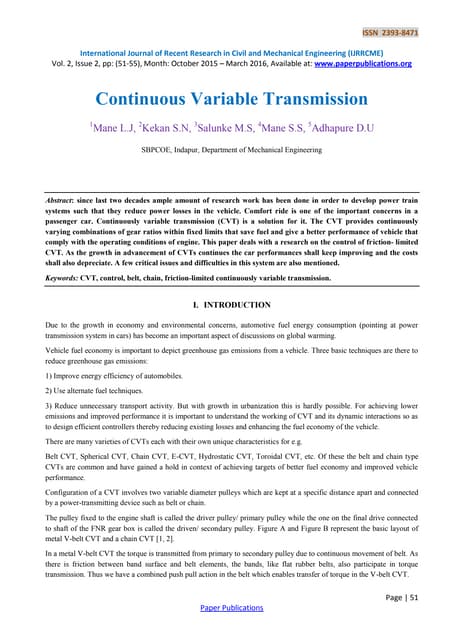
![Ramps
70 Degrees 68 Degrees [Flat] 66 Degrees
Θ ΘΘ](https://image.slidesharecdn.com/7e2194ab-a111-4a8d-94a4-43f83a162d59-141223003001-conversion-gate02/75/CVT-Final-Presentation-RevC-12-2048.jpg)




























































![[IJET-V1I6P20] Authors : Dhanashree Narendra Chaudhari, Pundlik nivrutti Patil](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i6p20-160110021021-thumbnail.jpg?width=640&height=640&fit=bounds)



![[IJET-V2I3P23] Authors: Dhanashree N Chaudhari, Pundlik N Patil](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v2i3p23-160711112928-thumbnail.jpg?width=640&height=640&fit=bounds)