Downloaded 1,523 times
![Weight of disc = 8.8 N
Weight of pulley = 8.8*2 = 17.6 N
This weight of pulley acts as a point load on shaft.
Bending moment due to this point load M = wl/4 = (17.6*0.470)/4
M = 2.07 N m
Power of the motor used = 0.25 HP = 186.5 watt
Speed of the motor = 1400 rpm (approx.)
Torque produced by motor T = (P*60)/(2πN) = (186.5*60)/(2π*1400)
T = 1.27 Nm
Equivalent bending moment Me = [M+(M2+T2 )1/2]/2
Me = 2.24 Nm
For mild steel,
Allowable bending stess = 56 Mpa
Allowable shear stress = 42 Mpa
Factor of safety = 6](https://image.slidesharecdn.com/continuously-variable-transmission-cvt-120531120859-phpapp02/85/Continuously-variable-transmission-cvt-6-320.jpg)
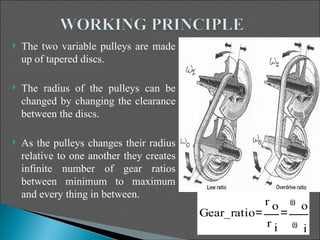
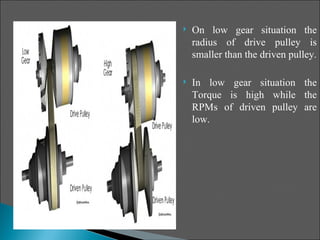
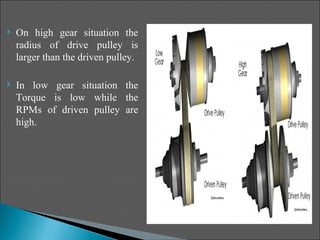
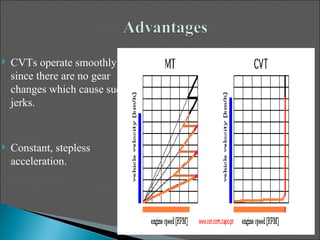
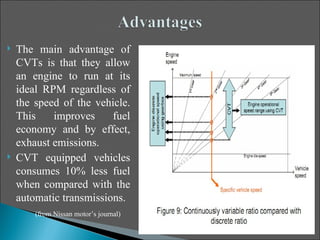
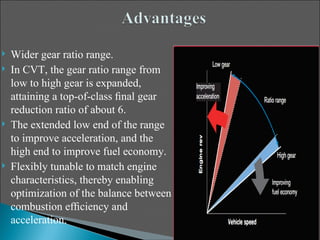


The document discusses continuous variable transmissions (CVTs). It explains that CVTs provide infinite gear ratios between a minimum and maximum rather than distinct gears. This allows the engine to constantly operate at the ideal RPM for better fuel efficiency and acceleration without jerks between gears. CVTs also have fewer moving parts, wider ratio ranges, and are simpler than traditional automatic transmissions while providing constant acceleration. The document predicts CVTs will become more prominent as the technology further develops.