This document contains a chapter on topics in vector calculus, including exercises on vector fields, divergence, curl, and applications of vector calculus identities and theorems. The exercises involve calculating divergence and curl of various vector fields, applying vector calculus operations like divergence and curl to scalar and vector functions, and manipulating vector calculus identities.
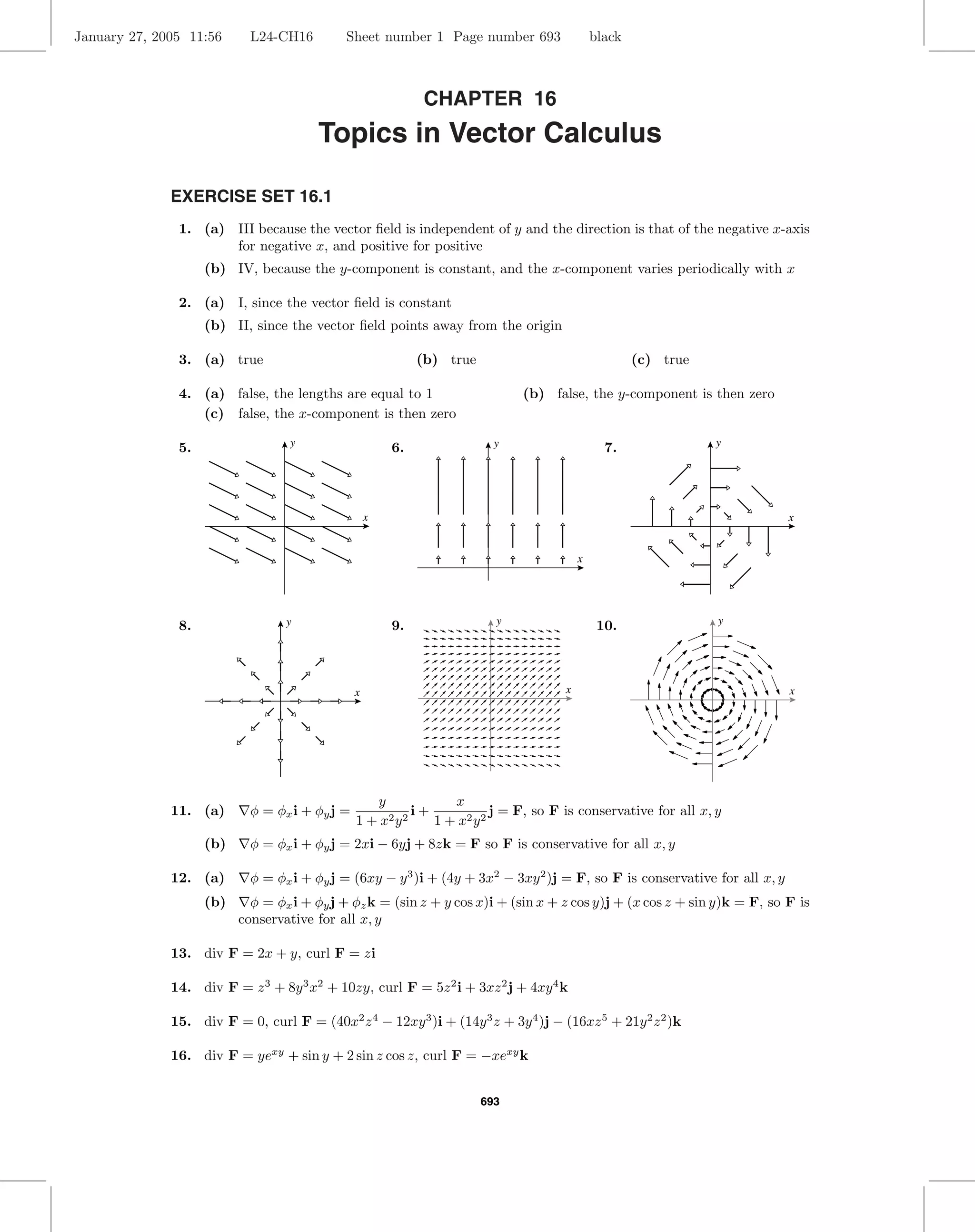

![January 27, 2005 11:56 L24-CH16 Sheet number 3 Page number 695 black
Exercise Set 16.1 695
33. Let F = f i + gj + hk ;
∂ ∂h ∂g ∂ ∂f ∂h ∂ ∂g ∂f
div(curl F) = − + − + −
∂x ∂y ∂z ∂y ∂z ∂x ∂z ∂x ∂y
∂2h ∂2g ∂2f ∂2h ∂2g ∂2f
= − + − + − = 0,
∂x∂y ∂x∂z ∂y∂z ∂y∂x ∂z∂x ∂z∂y
assuming equality of mixed second partial derivatives
∂2φ ∂2φ ∂2φ ∂2φ ∂2φ ∂2φ
34. curl (∇φ) = − i+ − j+ − k = 0, assuming equality
∂y∂z ∂z∂y ∂z∂x ∂x∂z ∂x∂y ∂y∂x
of mixed second partial derivatives
35. ∇ · (kF) = k∇ · F, ∇ · (F + G) = ∇ · F + ∇ · G, ∇ · (φF) = φ∇ · F + ∇φ · F, ∇ · (∇ × F) = 0
36. ∇ × (kF) = k∇ × F, ∇ × (F + G) = ∇ × F + ∇ × G, ∇ × (φF) = φ∇ × F + ∇φ × F, ∇ × (∇φ) = 0
37. (a) curl r = 0i + 0j + 0k = 0
x y z r
(b) ∇ r = ∇ x2 + y 2 + z 2 = i+ j+ k=
x2 + y2 + z2 x2 + y2 + z2 x2 + y2 + z2 r
38. (a) div r = 1 + 1 + 1 = 3
1 xi + yj + zk r
(b) ∇ = ∇(x2 + y 2 + z 2 )−1/2 = − 2 =−
r (x + y 2 + z 2 )3/2 r 3
∂r ∂r ∂r f (r)
39. (a) ∇f (r) = f (r) i + f (r) j + f (r) k = f (r)∇r = r
∂x ∂y ∂z r
f (r)
(b) div[f (r)r] = f (r)div r + ∇f (r) · r = 3f (r) + r · r = 3f (r) + rf (r)
r
f (r)
40. (a) curl[f (r)r] = f (r)curl r + ∇f (r) × r = f (r)0 + r×r=0+0=0
r
f (r) f (r) f (r)
(b) ∇2 f (r) = div[∇f (r)] = div r = div r + ∇ ·r
r r r
f (r) rf (r) − f (r) f (r)
=3 + r·r=2 + f (r)
r r3 r
41. f (r) = 1/r3 , f (r) = −3/r4 , div(r/r3 ) = 3(1/r3 ) + r(−3/r4 ) = 0
42. Multiply 3f (r) + rf (r) = 0 through by r2 to obtain 3r2 f (r) + r3 f (r) = 0,
d[r3 f (r)]/dr = 0, r3 f (r) = C, f (r) = C/r3 , so F = Cr/r3 (an inverse-square field).
43. (a) At the point (x, y) the slope of the line along which the vector −yi + xj lies is −x/y; the
slope of the tangent line to C at (x, y) is dy/dx, so dy/dx = −x/y.
(b) ydy = −xdx, y 2 /2 = −x2 /2 + K1 , x2 + y 2 = K](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-3-2048.jpg)

![January 27, 2005 11:56 L24-CH16 Sheet number 5 Page number 697 black
Exercise Set 16.2 697
(b) From Example 8(b) cos α ds = F · dr ≈ 5.83629, and
C C
2
ds = 1 + (2t)2 dt ≈ 6.125726619.
C −1
11 √ √
2 2 1
dx dy 1 4
7. (a) ds = + dt, so (2t − 3t2 ) 4 + 36t2 dt = − 10 − ln( 10 − 3) −
dt dt 0 108 36 27
1 1
1
(b) (2t − 3t2 )2 dt = 0 (c) (2t − 3t2 )6t dt = −
0 0 2
1 1
864 54
8. (a) t(3t2 )(6t3 )2 1 + 36t2 + 324t4 dt = (b) t(3t2 )(6t3 )2 dt =
0 5 0 5
1 1
648
(c) t(3t2 )(6t3 )2 6t dt = (d) t(3t2 )(6t3 )2 18t2 dt = 162
0 11 0
1
9. (a) C : x = t, y = t, 0 ≤ t ≤ 1; 6t dt = 3
0
1
(b) C : x = t, y = t2 , 0 ≤ t ≤ 1; (3t + 6t2 − 2t3 )dt = 3
0
(c) C : x = t, y = sin(πt/2), 0 ≤ t ≤ 1;
1
[3t + 2 sin(πt/2) + πt cos(πt/2) − (π/2) sin(πt/2) cos(πt/2)]dt = 3
0
1
(d) C : x = t3 , y = t, 0 ≤ t ≤ 1; (9t5 + 8t3 − t)dt = 3
0
1
1
10. (a) C : x = t, y = t, z = t, 0 ≤ t ≤ 1; (t + t − t) dt =
0 2
1
1
(b) C : x = t, y = t2 , z = t3 , 0 ≤ t ≤ 1; (t2 + t3 (2t) − t(3t2 )) dt = −
0 60
1
π 2
(c) C : x = cos πt, y = sin πt, z = t, 0 ≤ t ≤ 1; (−π sin2 πt + πt cos πt − cos πt) dt = − −
0 2 π
√
3
1+t 3 √ 1
1 + 2t √
11. dt = (1 + t)−1/2 dt = 2 12. 5 dt = 5(π/4 + ln 2)
0 1+t 0 0 1 + t2
1 1
13. 3(t2 )(t2 )(2t3 /3)(1 + 2t2 ) dt = 2 t7 (1 + 2t2 ) dt = 13/20
0 0
√
5 2π √ π/4
14. e−t dt = 5(1 − e−2π )/4 15. (8 cos2 t−16 sin2 t−20 sin t cos t)dt = 1−π
4 0 0
1
2 2
16. t − t5/3 + t2/3 dt = 6/5
−1 3 3
3
1
17. C : x = (3 − t)2 /3, y = 3 − t, 0 ≤ t ≤ 3; (3 − t)2 dt = 3
0 3
1
2 2/3 2 1/3
18. C : x = t2/3 , y = t, −1 ≤ t ≤ 1; t − t + t7/3 dt = 4/5
−1 3 3](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-5-2048.jpg)



![January 27, 2005 11:56 L24-CH16 Sheet number 9 Page number 701 black
Exercise Set 16.3 701
4. ∂(ex cos y)/∂y = −ex sin y = ∂(−ex sin y)/∂x, conservative so ∂φ/∂x = ex cos y and
∂φ/∂y = −ex sin y, φ = ex cos y + k(y), −ex sin y + k (y) = −ex sin y,
k (y) = 0, k(y) = K, φ = ex cos y + K
5. ∂(cos y + y cos x)/∂y = − sin y + cos x = ∂(sin x − x sin y)/∂x, conservative so
∂φ/∂x = cos y + y cos x and ∂φ/∂y = sin x − x sin y, φ = x cos y + y sin x + k(y),
−x sin y + sin x + k (y) = sin x − x sin y, k (y) = 0, k(y) = K, φ = x cos y + y sin x + K
6. ∂(x ln y)/∂y = x/y and ∂(y ln x)/∂x = y/x, not conservative
7. (a) ∂(y 2 )/∂y = 2y = ∂(2xy)/∂x, independent of path
1
(b) C : x = −1 + 2t, y = 2 + t, 0 ≤ t ≤ 1; (4 + 14t + 6t2 )dt = 13
0
(c) ∂φ/∂x = y 2 and ∂φ/∂y = 2xy, φ = xy 2 + k(y), 2xy + k (y) = 2xy, k (y) = 0, k(y) = K,
φ = xy 2 + K. Let K = 0 to get φ(1, 3) − φ(−1, 2) = 9 − (−4) = 13
8. (a) ∂(y sin x)/∂y = sin x = ∂(− cos x)/∂x, independent of path
1
(b) C1 : x = πt, y = 1 − 2t, 0 ≤ t ≤ 1; (π sin πt − 2πt sin πt + 2 cos πt)dt = 0
0
(c) ∂φ/∂x = y sin x and ∂φ/∂y = − cos x, φ = −y cos x + k(y), − cos x + k (y) = − cos x,
k (y) = 0, k(y) = K, φ = −y cos x+K. Let K = 0 to get φ(π, −1)−φ(0, 1) = (−1)−(−1) = 0
9. ∂(3y)/∂y = 3 = ∂(3x)/∂x, φ = 3xy, φ(4, 0) − φ(1, 2) = −6
10. ∂(ex sin y)/∂y = ex cos y = ∂(ex cos y)/∂x, φ = ex sin y, φ(1, π/2) − φ(0, 0) = e
11. ∂(2xey )/∂y = 2xey = ∂(x2 ey )/∂x, φ = x2 ey , φ(3, 2) − φ(0, 0) = 9e2
12. ∂(3x − y + 1)/∂y = −1 = ∂[−(x + 4y + 2)]/∂x,
φ = 3x2 /2 − xy + x − 2y 2 − 2y, φ(0, 1) − φ(−1, 2) = 11/2
13. ∂(2xy 3 )/∂y = 6xy 2 = ∂(3x2 y 2 )/∂x, φ = x2 y 3 , φ(−1, 0) − φ(2, −2) = 32
14. ∂(ex ln y − ey /x)/∂y = ex /y − ey /x = ∂(ex /y − ey ln x)/∂x,
φ = ex ln y − ey ln x, φ(3, 3) − φ(1, 1) = 0
15. φ = x2 y 2 /2, W = φ(0, 0) − φ(1, 1) = −1/2 16. φ = x2 y 3 , W = φ(4, 1) − φ(−3, 0) = 16
17. φ = exy , W = φ(2, 0) − φ(−1, 1) = 1 − e−1
18. φ = e−y sin x, W = φ(−π/2, 0) − φ(π/2, 1) = −1 − 1/e
19. ∂(ey + yex )/∂y = ey + ex = ∂(xey + ex )/∂x so F is conservative, φ(x, y) = xey + yex so
F · dr = φ(0, ln 2) − φ(1, 0) = ln 2 − 1
C
20. ∂(2xy)/∂y = 2x = ∂(x2 + cos y)/∂x so F is conservative, φ(x, y) = x2 y + sin y so
F · dr = φ(π, π/2) − φ(0, 0) = π 3 /2 + 1
C](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-9-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 10 Page number 702 black
702 Chapter 16
21. F · dr = [(ey + yex )i + (xey + ex )j] · [(π/2) cos(πt/2)i + (1/t)j]dt
π
= cos(πt/2)(ey + yex ) + (xey + ex )/t dt,
2
2
π 1
so F · dr = cos(πt/2) t + (ln t)esin(πt/2) + sin(πt/2) + esin(πt/2) dt = ln 2 − 1
C 1 2 t
22. F · dr = 2t2 cos(t/3) + [t2 + cos(t cos(t/3))](cos(t/3) − (t/3) sin(t/3)) dt, so
π
F · dr = 2t2 cos(t/3) + [t2 + cos(t cos(t/3))](cos(t/3) − (t/3) sin(t/3)) dt = 1 + π 3 /2
C 0
23. No; a closed loop can be found whose tangent everywhere makes an angle < π with the vector
field, so the line integral F · dr > 0, and by Theorem 16.3.2 the vector field is not conservative.
C
24. The vector field is constant, say F = ai + bj, so let φ(x, y) = ax + by and F is conservative.
25. Let r(t) be a parametrization of the circle C. Then by Theorem 16.3.2(b),
Fdr = F · r (t) dt = 0. Let h(t) = F(x, y) · r (t). Then h is continuous. We must find two
C C
points at which h = 0. If h(t) = 0 everywhere on the circle, then we are done; otherwise there are
points at which h is nonzero, say h(t1 ) > 0. Then there is a small interval around t1 on which the
integral of h is positive.
(Let = h(t1 )/2. Since h(t) is continuous there exists δ > 0 such that for |t − t1 | < δ, h(t) > /2.
t1 +δ
Then h(t) dt ≥ (2δ) /2 > 0.)
t1 −δ
Since h = 0, there are points on the circle where h < 0, say h(t2 ) < 0. Now consider the
C
parametrization h(θ), 0 ≤ θ ≤ 2π. Let θ1 < θ2 correspond to the points above where h > 0 and
h < 0. Then by the Intermediate Value Theorem on [θ1 , θ2 ] there must be a point where h = 0,
say h(θ3 ) = 0, θ1 < θ3 < θ2.
To find a second point where h = 0, assume that h is a periodic function with period 2π (if need be,
extend the definition of h). Then h(t2 − 2π) = h(t2 ) < 0. Apply the Intermediate Value Theorem
on [t2 − 2π, t1 ] to find an additional point θ4 at which h = 0. The reader should prove that θ3 and
θ4 do indeed correspond to distinct points on the circle.
26. The function F · r (t) is not necessarily continuous since the tangent to the square has obvious
discontinuities. For a counterexample to the result, let the square have vertices at (0, 0), (0, 1),
(1, 1), (1, 0). Let Φ(x, y) = xy + x + y and let F = ∇Φ = (y + 1)i + (x + 1)j. Then F is conservative
, but on the bottom side of the square, where y = 0, F · r = −F · j = −x − 1 ≤ 1 < 0. On the top
edge F · r = F · j = x + 1 ≥ 1 > 0. Similarly for the other two sides of the square. Thus at no
point is F · r = 0.
∂φ ∂φ ∂φ ∂φ ∂φ ∂φ
27. If F is conservative, then F = ∇φ = i+ j+ k and hence f = ,g = , and h = .
∂x ∂y ∂z ∂x ∂y ∂z
∂f ∂2φ ∂g ∂ 2 φ ∂f ∂2φ ∂h ∂ 2 φ ∂g ∂2φ ∂h ∂2φ
Thus = and = , = and = , = and = .
∂y ∂y∂x ∂x ∂x∂y ∂z ∂z∂x ∂x ∂x∂z ∂z ∂z∂y ∂y ∂y∂z
The result follows from the equality of mixed second partial derivatives.](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-10-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 11 Page number 703 black
Exercise Set 16.3 703
28. Let f (x, y, z) = yz, g(x, y, z) = xz, h(x, y, z) = yx2 , then ∂f /∂z = y, ∂h/∂x = 2xy = ∂f /∂z, thus
by Exercise 27, F = f i+gj+hk is not conservative, and by Theorem 16.3.2, yz dx+xz dy+yx2 dz
C
is not independent of the path.
∂
29. (h(x)[x sin y + y cos y]) = h(x)[x cos y − y sin y + cos y]
∂y
∂
(h(x)[x cos y − y sin y]) = h(x) cos y + h (x)[x cos y − y sin y],
∂x
equate these two partial derivatives to get (x cos y − y sin y)(h (x) − h(x)) = 0 which holds for all
x and y if h (x) = h(x), h(x) = Cex where C is an arbitrary constant.
∂ cx 3cxy ∂ cy
30. (a) 2 + y 2 )3/2
=− 2 2 )−5/2
= 2 + y 2 )3/2
when (x, y) = (0, 0),
∂y (x (x + y ∂x (x
so by Theorem 16.3.3, F is conservative. Set ∂φ/∂x = cx/(x2 + y 2 )−3/2 ,
then φ(x, y) = −c(x2 + y 2 )−1/2 + k(y), ∂φ/∂y = cy/(x2 + y 2 )−3/2 + k (y), so k (y) = 0.
c
Thus φ(x, y) = − 2 is a potential function.
(x + y 2 )1/2
(b) curl F = 0 is similar to Part (a), so F is conservative. Let
cx
φ(x, y, z) = dx = −c(x2 + y 2 + z 2 )−1/2 + k(y, z). As in Part (a),
(x2 + y 2 + z 2 )3/2
∂k/∂y = ∂k/∂z = 0, so φ(x, y, z) = −c/(x2 + y 2 + z 2 )1/2 is a potential function for F.
Q
1 1
31. (a) See Exercise 30, c = 1; W = F · dr = φ(3, 2, 1) − φ(1, 1, 2) = − √ + √
P 14 6
1 1
(b) C begins at P (1, 1, 2) and ends at Q(3, 2, 1) so the answer is again W = − √ + √ .
14 6
(c) The circle is not specified, but cannot pass through (0, 0, 0), so Φ is continuous and differ-
entiable on the circle. Start at any point P on the circle and return to P , so the work is
Φ(P ) − Φ(P ) = 0.
C begins at, say, (3, 0) and ends at the same point so W = 0.
dx dy
32. (a) F · dr = y −x dt for points on the circle x2 + y 2 = 1, so
dt dt
π
C1 : x = cos t, y = sin t, 0 ≤ t ≤ π, F · dr = (− sin2 t − cos2 t) dt = −π
C1 0
π
C2 : x = cos t, y = − sin t, 0 ≤ t ≤ π, F · dr = (sin2 t + cos2 t) dt = π
C2 0
∂f x2 − y 2 ∂g y 2 − x2 ∂f
(b) = 2 ,
2 )2 ∂x
=− 2 =
∂y (x + y (x + y 2 )2 ∂y
(c) The circle about the origin of radius 1, which is formed by traversing C1 and then traversing
C2 in the reverse direction, does not lie in an open simply connected region inside which F
is continuous, since F is not defined at the origin, nor can it be defined there in such a way
as to make the resulting function continuous there.](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-11-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 12 Page number 704 black
704 Chapter 16
33. If C is composed of smooth curves C1 , C2 , . . . , Cn and curve Ci extends from (xi−1 , yi−1 ) to (xi , yi )
n n
then F · dr = F · dr = [φ(xi , yi ) − φ(xi−1 , yi−1 )] = φ(xn , yn ) − φ(x0 , y0 )
C i=1 Ci i=1
where (x0 , y0 ) and (xn , yn ) are the endpoints of C.
34. F · dr + F · dr = 0, but F · dr = − F · dr so F · dr = F · dr, thus
C1 −C2 −C2 C2 C1 C2
F · dr is independent of path.
C
35. Let C1 be an arbitrary piecewise smooth curve from (a, b) to a point (x, y1 ) in the disk, and C2
the vertical line segment from (x, y1 ) to (x, y). Then
(x,y1 )
φ(x, y) = F · dr + F · dr = F · dr + F · dr.
C1 C2 (a,b) C2
The first term does not depend on y;
∂φ ∂ ∂
hence = F · dr = f (x, y)dx + g(x, y)dy.
∂y ∂y C2 ∂y C2
∂φ ∂
However, the line integral with respect to x is zero along C2 , so = g(x, y) dy.
∂y ∂y C2
y
∂φ ∂
Express C2 as x = x, y = t where t varies from y1 to y, then = g(x, t) dt = g(x, y).
∂y ∂y y1
EXERCISE SET 16.4
1 1
1. (2x − 2y)dA = (2x − 2y)dy dx = 0; for the line integral, on x = 0, y 2 dx = 0, x2 dy = 0;
0 0
R
on y = 0, y 2 dx = x2 dy = 0; on x = 1, y 2 dx + x2 dy = dy; and on y = 1, y 2 dx + x2 dy = dx,
1 0
hence y 2 dx + x2 dy = dy + dx = 1 − 1 = 0
0 1
C
2. (1 − 1)dA = 0; for the line integral let x = cos t, y = sin t,
R
2π
y dx + x dy = (− sin2 t + cos2 t)dt = 0
0
C
4 2 2π 3
3. (2y − 3x)dy dx = 0 4. (1 + 2r sin θ)r dr dθ = 9π
−2 1 0 0
π/2 π/2
5. (−y cos x + x sin y)dy dx = 0 6. (sec2 x − tan2 x)dA = dA = π
0 0
R R
1 x
7. [1 − (−1)]dA = 2 dA = 8π 8. (2x − 2y)dy dx = 1/30
0 x2
R R](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-12-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 13 Page number 705 black
Exercise Set 16.4 705
y 1
9. − − dA = − dA = −4
1+y 1+y
R R
π/2 4
10. (−r2 )r dr dθ = −32π
0 0
y2 1
11. − 2
− dA = − dA = −1
1+y 1 + y2
R R
√
1 x
12. (cos x cos y − cos x cos y)dA = 0 13. (y 2 − x2 )dy dx = 0
0 x2
R
2 2x 2 2x
14. (a) (−6x + 2y)dy dx = −56/15 (b) 6y dy dx = 64/5
0 x2 0 x2
15. (a) C : x = cos t, y = sin t, 0 ≤ t ≤ 2π;
2π
= esin t (− sin t) + sin t cos tecos t dt ≈ −3.550999378;
C 0
∂ ∂ y
(yex ) − e dA = [yex − ey ] dA
∂x ∂y
R R
2π 1
= r sin θer cos θ − er sin θ r dr dθ ≈ −3.550999378
0 0
1
2
(b) C1 : x = t, y = t2 , 0 ≤ t ≤ 1; [ey dx + yex dy] = et + 2t3 et dt ≈ 2.589524432
0
C1
1
2 e+3
C2 : x = t2 , y = t, 0 ≤ t ≤ 1; [ey dx + yex dy] = 2tet + tet dt = ≈ 2.859140914
0 2
C2
√
1 x
− ≈ −0.269616482; = [yex − ey ] dy dx ≈ −0.269616482
0 x2
C1 C2 R
2π 2π
16. (a) x dy = ab cos2 t dt = πab (b) −y dx = ab sin2 t dt = πab
C 0 C 0
2π
1 1
17. A = −y dx + x dy = (3a2 sin4 φ cos2 φ + 3a2 cos4 φ sin2 φ)dφ
2 C 2 0
2π 2π
3 2 3 2
= a sin2 φ cos2 φ dφ = a sin2 2φ dφ = 3πa2 /8
2 0 8 0
18. C1 : (0, 0) to (a, 0); x = at, y = 0, 0≤t≤1
C2 : (a, 0) to (0, b); x = a − at, y = bt, 0≤t≤1
C3 : (0, b) to (0, 0); x = 0, y = b − bt, 0 ≤ t ≤ 1
1 1 1
1
A= x dy = (0)dt + ab(1 − t)dt + (0)dt = ab
C 0 0 0 2](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-13-2048.jpg)


![January 27, 2005 11:56 L24-CH16 Sheet number 16 Page number 708 black
708 Chapter 16
ab
32. A = ; C1 : x = t, y = 0, 0 ≤ t ≤ a, C2 : x = a, y = t, 0 ≤ t ≤ b;
2
C3 : x = a − at, y = b − bt, 0 ≤ t ≤ 1;
b 1
ba2
x2 dy = 0, x2 dy = a2 dt = ba2 , x2 dy = a2 (1 − t)2 (−b) dt = − ,
C1 C2 0 C3 0 3
2
2ba 2a
x2 dy = + + = , x=
¯ ;
C C1 C2 C3 3 3
1
ab2 b 2a b
y 2 dx = 0 + 0 − ab2 (1 − t)2 dt = − , y = , centroid
¯ ,
C 0 3 3 3 3
33. From Green’s Theorem, the given integral equals (1−x2 −y 2 )dA where R is the region enclosed
R
by C. The value of this integral is maximum if the integration extends over the largest region for
which the integrand 1 − x2 − y 2 is nonnegative so we want 1 − x2 − y 2 ≥ 0, x2 + y 2 ≤ 1. The
largest region is that bounded by the circle x2 + y 2 = 1 which is the desired curve C.
34. (a) C : x = a + (c − a)t, y = b + (d − b)t, 0 ≤ t ≤ 1
1
−y dx + x dy = (ad − bc)dt = ad − bc
C 0
(b) Let C1 , C2 , and C3 be the line segments from (x1 , y1 ) to (x2 , y2 ), (x2 , y2 ) to (x3 , y3 ), and
(x3 , y3 ) to (x1 , y1 ), then if C is the entire boundary consisting of C1 , C2 , and C3
3
1 1
A= −y dx + x dy = −y dx + x dy
2 C 2 i=1 Ci
1
= [(x1 y2 − x2 y1 ) + (x2 y3 − x3 y2 ) + (x3 y1 − x1 y3 )]
2
1
(c) A = [(x1 y2 − x2 y1 ) + (x2 y3 − x3 y2 ) + · · · + (xn y1 − x1 yn )]
2
1
(d) A = [(0 − 0) + (6 + 8) + (0 + 2) + (0 − 0)] = 8
2
35. F · dr = (x2 + y) dx + (4x − cos y) dy = 3 dA = 3(25 − 2) = 69
C C
R
36. F · dr = (e−x + 3y) dx + x dy = −2 dA = −2[π(4)2 − π(2)2 ] = −24π
C C
R
EXERCISE SET 16.5
1. R is the annular region between x2 + y 2 = 1 and x2 + y 2 = 4;
x2 y2
z 2 dS = (x2 + y 2 ) + 2 + 1 dA
x2 +y 2 x + y2
σ R
√ √ 2π 2
15 √
= 2 (x2 + y 2 )dA = 2 r3 dr dθ = π 2.
0 1 2
R](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-16-2048.jpg)







![January 27, 2005 11:56 L24-CH16 Sheet number 24 Page number 716 black
716 Chapter 16
1
21. (a) n = √ [i + j + k],
3
1 1−x
V = F ·n dS = (2x − 3y + 1 − x − y) dy dx = 0 m3
σ 0 0
(b) m = 0 · 806 = 0 kg
22. (a) Let x = 3 sin φ cos θ, y = 3 sin φ sin θ, z = 3 cos φ, n = sin φ cos θi + sin φ sin θ j + cos φ k, so
V = F ·n dS = 9 sin φ (−3 sin2 φ sin θ cos θ + 3 sin φ cos φ sin θ + 9 sin φ cos φ cos θ) dA
σ
A
2π 3
= 3 sin φ cos θ(− sin φ sin θ + 4 cos φ) r dr dθ = 0 m3
0 0
dm
(b) = 0 · 1060 = 0 kg
dt
∂g ∂g
23. (a) G(x, y, z) = x − g(y, z), ∇G = i − j− k, apply Theorem 16.6.3:
∂y ∂z
∂x ∂x
F · ndS = F· i− j− k dA, if σ is oriented by front normals, and
∂y ∂z
σ R
∂x ∂x
F · ndS = F· −i + j+ k dA, if σ is oriented by back normals,
∂y ∂z
σ R
where R is the projection of σ onto the yz-plane.
(b) R is the semicircular region in the yz-plane enclosed by z = 1 − y 2 and z = 0;
√ 2
1 1−y
32
F · n dS = (−y − 2yz + 16z)dA = (−y − 2yz + 16z)dz dy = .
−1 0 3
σ R
∂g ∂g
24. (a) G(x, y, z) = y − g(x, z), ∇G = − i+j− k, apply Theorem 16.6.3:
∂x ∂z
∂y ∂y
F· i−j+ k dA, σ oriented by left normals,
∂x ∂z
R
∂y ∂y
and F· − i+j− k dA, σ oriented by right normals,
∂x ∂z
R
where R is the projection of σ onto the xz-plane.
√
(b) R is the semicircular region in the xz-plane enclosed by z = 1 − x2 and z = 0;
√
1 1−x2
π
F · n dS = (−2x2 + (x2 + z 2 ) − 2z 2 )dA = − (x2 + z 2 )dz dx = − .
−1 0 4
σ R
25. (a) On the sphere, r = a so F = ak r and F · n = ak r · (r/a) = ak−1 r 2
= ak−1 a2 = ak+1 ,
hence F · n dS = ak+1 dS = ak+1 (4πa2 ) = 4πak+3 .
σ σ
(b) If k = −3, then F · n dS = 4π.
σ](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-24-2048.jpg)

![January 27, 2005 11:56 L24-CH16 Sheet number 26 Page number 718 black
718 Chapter 16
σ5 : z = 0, F · n = −xz = 0, (0)dA = 0 σ6 : z = 2, F · n = xz = 2x, (2x)dA = 8
σ5 σ6
F · n = 24; also div FdV = (y + z + x)dV = 24
σ G G
2 1 3
5. G is the rectangular solid; div F dV = (2x − 1) dx dy dz = 12.
0 0 0
G
6. G is the spherical solid enclosed by σ; div F dV = 0 dV = 0 dV = 0.
G G G
7. G is the cylindrical solid;
div F dV = 3 dV = (3)(volume of cylinder) = (3)[πa2 (1)] = 3πa2 .
G G
8. G is the solid bounded by z = 1 − x2 − y 2 and the xy-plane;
2π 1 1−r 2
3π
div F dV = 3 dV = 3 r dz dr dθ = .
0 0 0 2
G G
9. G is the cylindrical solid;
2π 2 3
div F dV = 3 (x2 + y 2 + z 2 )dV = 3 (r2 + z 2 )r dz dr dθ = 180π.
0 0 0
G G
1 1−x 1−x−y
1
10. G is the tetrahedron; div F dV = x dV = x dz dy dx = .
0 0 0 24
G G
11. G is the hemispherical solid bounded by z = 4 − x2 − y 2 and the xy-plane;
2π π/2 2
192π
div F dV = 3 (x2 + y 2 + z 2 )dV = 3 ρ4 sin φ dρ dφ dθ = .
0 0 0 5
G G
12. G is the hemispherical solid;
2π π/2 a
5πa4
div F dV = 5 z dV = 5 ρ3 sin φ cos φ dρ dφ dθ = .
0 0 0 4
G G
13. G is the conical solid;
2π 1 1
π
div F dV = 2 (x + y + z)dV = 2 (r cos θ + r sin θ + z)r dz dr dθ = .
0 0 r 2
G G
14. G is the solid bounded by z = 2x and z = x2 + y 2 ;
π/2 2 cos θ 2r cos θ
π
div F dV = dV = 2 r dz dr dθ = .
0 0 r2 2
G G
15. G is the solid bounded by z = 4 − x2 , y + z = 5, and the coordinate planes;
2 4−x2 5−z
4608
div F dV = 4 x2 dV = 4 x2 dy dz dx = .
−2 0 0 35
G G](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-26-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 27 Page number 719 black
Exercise Set 16.7 719
16. r · n dS = div r dV = 3 dV = 3vol(G)
σ G G
17. F · n dS = 3[π(32 )(5)] = 135π
σ
18. F · n dS = div F dV = 0 dV = 0;
σ G G
since the vector field is constant, the same amount enters as leaves.
19. (a) F = xi + yj + zk, div F = 3 (b) F = −xi − yj − zk, div F = −3
20. (a) The flux through any cylinder whose axis is the z-axis is positive by inspection; by the
Divergence Theorem, this says that the divergence cannot be negative at the origin, else
the flux through a small enough cylinder would also be negative (impossible), hence the
divergence at the origin must be ≥ 0.
(b) Similar to Part (a), ≤ 0.
21. 0 = F div dV = F · n dS. Let σ1 denote that part of σ on which F · n > 0 and let σ2
R σ
denote the part where F · n < 0. If F · n > 0 then the integral over σ2 is negative (and equal
σ1
in magnitude). Thus the boundary between σ1 and σ2 is infinite, hence F and n are perpendicular
on an infinite set.
22. No; the argument in Exercise 21 rests on the assumption that F · n is continuous, which may not
be true on a cube because the tangent jumps from one value to the next.
Let φ(x, y, z) = xy + xz + yz + x + y + z, so F = ∇φ = (y + z + 1)j + (x + z + 1)j + (x + y + 1)k.
On each side of the cube we must show F · n = 0. On the face where x = 0, for example,
F · n = −(y + z + 1) ≤ −1 < 0, and on the face where x = 1, F · n = y + z + 1 ≥ 1 > 0. The other
faces can be treated in a similar manner.
23. curl F · n dS = div(curl F)dV = (0)dV = 0
σ G G
24. ∇f · n dS = div (∇f )dV = ∇2 f dV
σ G G
25. (f ∇g) · n = div (f ∇g)dV = (f ∇2 g + ∇f · ∇g)dV by Exercise 31, Section 16.1.
σ G G
26. (f ∇g) · n dS = (f ∇2 g + ∇f · ∇g)dV by Exercise 25;
σ G
(g∇f ) · n dS = (g∇2 f + ∇g · ∇f )dV by interchanging f and g;
σ G
subtract to obtain the result.
27. Since v is constant, ∇ · v = 0. Let F = f v; then divF = (∇f )v and by the Divergence Theorem
f v · n dS = F · n dS = divF dV = (∇f ) · v dV
σ σ G G](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-27-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 28 Page number 720 black
720 Chapter 16
28. Let r = ui + vj + wk so that, for r = 0,
u v w
F(x, y, z) = r/||r||k = 2 i+ 2 j+ 2 k
(u + v 2 + w2 )k/2 (u + v 2 + w2 )k/2 (u + v 2 + w2 )k/2
∂F1 u2 + v 2 + w2 − ku2
= 2 ; similarly for ∂F2 /∂v, ∂F3 /∂w, so that
∂u (u + v 2 + w2 )(k/2)+1
3(u2 + v 2 + w2 ) − k(u2 + v 2 + w2 )
div F = = 0 if and only if k = 3.
(u2 + v 2 + w2 )(k/2)+1
29. div F = 0; no sources or sinks.
30. div F = y − x; sources where y > x, sinks where y < x.
31. div F = 3x2 + 3y 2 + 3z 2 ; sources at all points except the origin, no sinks.
32. div F = 3(x2 + y 2 + z 2 − 1); sources outside the sphere x2 + y 2 + z 2 = 1, sinks inside the sphere
x2 + y 2 + z 2 = 1.
33. Let σ1 be the portion of the paraboloid z = 1 − x2 − y 2 for z ≥ 0, and σ2 the portion of the plane
z = 0 for x2 + y 2 ≤ 1. Then
F · n dS = F · (2xi + 2yj + k) dA
σ1 R
√
1 1−x2
= √ (2x[x2 y − (1 − x2 − y 2 )2 ] + 2y(y 3 − x) + (2x + 2 − 3x2 − 3y 2 )) dy dx
−1 − 1−x2
= 3π/4;
z = 0 and n = −k on σ2 so F · n = 1 − 2x, F · n dS = (1 − 2x)dS = π. Thus
σ2 σ2
F · n dS = 3π/4 + π = 7π/4. But div F = 2xy + 3y 2 + 3 so
σ
√
1 1−x2 1−x2 −y 2
div F dV = √ (2xy + 3y 2 + 3) dz dy dx = 7π/4.
−1 − 1−x2 0
G
EXERCISE SET 16.8
1. If σ is oriented with upward normals then C consists of three parts parametrized as
C1 : r(t) = (1 − t)i + tj for 0 ≤ t ≤ 1, C2 : r(t) = (1 − t)j + tk for 0 ≤ t ≤ 1,
C3 : r(t) = ti + (1 − t)k for 0 ≤ t ≤ 1.
1
1
F · dr = F · dr = F · dr = (3t − 1)dt = so
C1 C2 C3 0 2
1 1 1 3
F · dr = + + = . curl F = i + j + k, z = 1 − x − y, R is the triangular region in
C 2 2 2 2
the xy-plane enclosed by x + y = 1, x = 0, and y = 0;
1 3
(curl F) · n dS = 3 dA = (3)(area of R) = (3) (1)(1) = .
2 2
σ R](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-28-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 29 Page number 721 black
Exercise Set 16.8 721
2. If σ is oriented with upward normals then C can be parametrized as r(t) = cos ti + sin tj + k for
0 ≤ t ≤ 2π.
2π
F · dr = (sin2 t cos t − cos2 t sin t)dt = 0;
C 0
curl F = 0 so (curl F) · n dS = 0 dS = 0.
σ σ
3. If σ is oriented with upward normals then C can be parametrized as r(t) = a cos ti + a sin tj for
0 ≤ t ≤ 2π.
2π
F · dr = 0 dt = 0; curl F = 0 so (curl F) · n dS = 0 dS = 0.
C 0
σ σ
4. If σ is oriented with upward normals then C can be parametrized as r(t) = 3 cos ti + 3 sin tj for
0 ≤ t ≤ 2π.
2π 2π
F · dr = (9 sin2 t + 9 cos2 t)dt = 9 dt = 18π.
C 0 0
curl F = −2i + 2j + 2k, R is the circular region in the xy-plane enclosed by x2 + y 2 = 9;
2π 3
(curl F) · n dS = (−4x + 4y + 2)dA = (−4r cos θ + 4r sin θ + 2)r dr dθ = 18π.
0 0
σ R
5. Take σ as the part of the plane z = 0 for x2 + y 2 ≤ 1 with n = k; curl F = −3y 2 i + 2zj + 2k,
(curl F) · n dS = 2 dS = (2)(area of circle) = (2)[π(1)2 ] = 2π.
σ σ
6. curl F = xi + (x − y)j + 6xy 2 k;
1 3
(curl F) · n dS = (x − y − 6xy 2 )dA = (x − y − 6xy 2 )dy dx = −30.
0 0
σ R
7. C is the boundary of R and curl F = 2i + 3j + 4k, so
F·r= curl F · n dS = 4 dA = 4(area of R) = 16π
R R
8. curl F = −4i − 6j + 6yk, z = y/2 oriented with upward normals, R is the triangular region in the
xy-plane enclosed by x + y = 2, x = 0, and y = 0;
2 2−x
(curl F) · n dS = (3 + 6y)dA = (3 + 6y)dy dx = 14.
0 0
σ R
9. curl F = xk, take σ as part of the plane z = y oriented with upward normals, R is the circular
region in the xy-plane enclosed by x2 + y 2 − y = 0;
π sin θ
(curl F) · n dS = x dA = r2 cos θ dr dθ = 0.
0 0
σ R
10. curl F = −yi − zj − xk, z = 1 − x − y oriented with upward normals, R is the triangular region in
the xy-plane enclosed by x + y = 1, x = 0 and y = 0;
1 1
(curl F) · n dS = (−y − z − x)dA = − dA = − (1)(1) = − .
2 2
σ R R](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-29-2048.jpg)

![January 27, 2005 11:56 L24-CH16 Sheet number 31 Page number 723 black
Review Exercises, Chapter 16 723
17. Since F is conservative, if C is any closed curve then F · dr = 0. But F · dr = F · T ds
C C C
from (30) of Section 16.2. In equation (9) the direction of n is arbitrary, so for any fixed curve Ca
the integral F · Tds = 0. Thus curl F(P0 ) · n = 0. But n is arbitrary, so we conclude that
Ca
curl F = 0.
∂B
18. Since E · rdr = curl E · n dS, it follows that curl E · ndS = − · ndS. This
∂t
C σ σ σ
∂B
relationship holds for any surface σ, hence curl E = − .
∂t
19. Parametrize C by x = cos t, y = sin t, 0 ≤ t ≤ 2π. But F = x2 yi + (y 3 − x)j + (2x − 1)k along C
so F · dr = −5π/4. Since curl F = (−2z − 2)j + (−1 − x2 )k,
C
(curl F) · n dS = (curl F) · (2xi + 2yj + k) dA
σ R √
1 1−x2
= √ [2y(2x2 + 2y 2 − 4) − 1 − x2 ] dy dx = −5π/4
−1 − 1−x2
REVIEW EXERCISES, CHAPTER 16
c (x − x0 )i + (y − y0 )j + (z − z0 )k
2. (b) (r − r0 ) (c) c
r − r0 3
(x − x0 )2 + (y − y0 )2 + (z − z0 )2
3. v = (1 − x)i + (2 − y)j, v = (1 − x)2 + (2 − y)2 ,
1 1−x 2−y
u= v= i+ j
v (1 − x)2 + (2 − y)2 (1 − x)2 + (2 − y)2
−2y 2x
4. i+ j 5. i + j + k
(x − y)2 (x − y)2
y 2 − x2 x2 − y 2 1 1
6. div F = + 2 + 2 = 2 , the level surface of div F = 1 is the
(x2 + y 2 )2 (x + y 2 )2 (x + y 2 ) x + y2
cylinder about the z-axis of radius 1.
b
dx dy
7. (a) f (x(t), y(t)) + g(x(t), y(t)) dt
a dt dt
b
(b) f (x(t), y(t)) x (t)2 + y (t)2 dt
a
8. (a) M = δ(x, y, z) ds (b) L = ds
C C
2π
11. s = θ, x = cos θ, y = sin θ, (cos θ − sin θ) dθ = 0, also follows from odd function rule.
0
2π
12. [cos t(− sin t) + t cos t − 2 sin2 t] dt = 0 + 0 − 2π = −2π
0](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-31-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 32 Page number 724 black
724 Chapter 16
2 2
t 2t 7 7
13. −2 dt = − dt = −
1 2t t 1 2 2
1
3
14. r(t) = ti + t2 j, W = F·r= [(t2 )2 + t(t2 )(2t)] dt =
C 0 5
16. ∇f = y 2 z 3 i + 2xyz 3 j + 3xy 2 z 2 k,
1
∇f · dr = [(t2 + t)2 sin3 (3πt/2) + 2t(t2 + t) sin3 (3πt/2)(2t + 1)
C 0
+ 3t(t2 + t)2 sin2 (3πt/2)(3π/2) cos(3πt/2)] dt = −4
∂ ∂
17. (a) If h(x)F is conservative, then (yh(x)) = (−2xh(x)), or h(x) = −2h(x) − 2xh (x) which
∂y ∂x
y 2
has the general solution x3 h(x)2 = C1 , h(x) = Cx−3/2 , so C 3/2 i − C 1/2 j is conservative,
√ x x
with potential function φ = −2Cy/ x.
∂ ∂
(b) If g(y)F(x, y) is conservative then (yg(y)) = (−2xg(y)), or g(y) + yg (y) = −2g(y),
∂y ∂x
1 2x
with general solution g(y) = C/y 3 , so F = C 2 i − C 3 j is conservative, with potential
y y
function Cx/y 2 .
18. (a) fy − gx = exy + xyexy − exy − xyexy = 0 so the vector field is conservative.
(b) φx = yexy − 1, φ = exy − x + k(x), φy = xexy , let k(x) = 0; φ(x, y) = exy − x
(c) W = F · dr = φ(x(8π), y(8π)) − φ(x(0), y(0)) = φ(8π, 0) − φ(0, 0) = −8π
C
21. Let O be the origin, P the point with polar coordinates θ = α, r = f (α), and Q the point with
polar coordinates θ = β, r = f (β). Let
dx dy
C1 : O to P ; x = t cos α, y = t sin α, 0 ≤ t ≤ f (α), −y +x =0
dt dt
dx dy
C2 : P to Q; x = f (t) cos t, y = f (t) sin t, α ≤ θ ≤ β, −y +x = f (t)2
dt dt
dx dy
C3 : Q to O; x = −t cos β, y = −t sin β, −f (β) ≤ t ≤ 0, −y +x =0
dt dt
β β
1 1 1
A= −y dx + x dy = [f (t)]2 dt; set t = θ and r = f (θ) = f (t), A = r2 dθ.
2 C 2 α 2 α
∂ ∂
22. (a) f (x) dx + g(y) dy = g(y) − f (x) dA = 0
∂x ∂y
C R
(b) W = F · dr = f (x) dx + g(y) dy = 0, so the work done by the vector field around any
C C
simple closed curve is zero. The field is conservative.](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-32-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 33 Page number 725 black
Review Exercises, Chapter 16 725
23. f (x, y, z)dS = f (x(u, v), y(u, v), z(u, v)) ru × rv du dv
σ R
24. Cylindrical coordinates r(θ, z) = cos θi + sin θj + zk, 0 ≤ θ ≤ 2π, 0 ≤ z ≤ 1,
rθ = − sin θi + cos θj, rz = k, rθ × rz = rθ rz sin(π/2) = 1; by Theorem 16.5.1,
2π 1
z dS = z dz dθ = π
0 0
σ
25. Yes; by imagining a normal vector sliding around the surface it is evident that the surface has two
sides.
27. r = xi + yj + (1 − x2 − y 2 )k, rx × ry = 2xi + 2yj + k, F = xi + yi + 2zk
Φ= F · (rx × ry ) dA = (2x2 + 2y 2 + 2(1 − x2 − y 2 )) dA = 2A = 2π
R R
∂r ∂r
28. r = sin φ cos θi + sin φ sin θj + cos φk, × = sin2 φ cos θi + sin2 φ sin θj + sin φ cos φk
∂φ ∂θ
2π π
∂r ∂r
Φ= F· × dA = (sin3 φ cos2 θ + 2 sin3 φ sin2 θ + 3 sin φ cos2 φ) dφ dθ = 8π
∂φ ∂θ 0 0
σ
30. Dn φ = n · ∇φ, so Dn φ dS = n · ∇φ dS = ∇ · (∇φ) dV
σ σ G
2 2 2
∂ φ ∂ φ ∂ φ
= + 2 + 2 dV
∂x2 ∂y ∂z
G
31. By Exercise 30, Dn f dS = − [fxx + fyy + fzz ] dV = −6 dV = −6vol(G) = −8π
σ G G
√ √ √ √
32. C is defined by r(θ) = 2 cos θi + 2 sin θj + k, 0 ≤ θ ≤ 2π, r (θ) = − 2 sin θi + 2 cos θj,
T = − sin θi + cos θj. By Stokes’ Theorem
2π √ √ √
(curlF) · n dS = F · T ds = 2[− sin θ(1 − 2 sin θ) + cos θ( 2 cos θ + 1) dθ = 4π
C 0
σ
33. A computation of curl F shows that curl F = 0 if and only if the three given equations hold.
Moreover the equations hold if F is conservative, so it remains to show that F is conservative if
curl F = 0. Let C by any simple closed curve in the region. Since the region is simply connected,
there is a piecewise smooth, oriented surface σ in the region with boundary C. By Stokes’ Theorem,
F · dr = (curl F) · n dS = 0 dS = 0.
C σ σ
By the 3-space analog of Theorem 16.3.2, F is conservative.
34. (a) conservative, φ(x, y, z) = xz 2 − e−y (b) not conservative, fy = gx](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-33-2048.jpg)
![January 27, 2005 11:56 L24-CH16 Sheet number 34 Page number 726 black
726 Chapter 16
35. (a) conservative, φ(x, y, z) = − cos x + yz (b) not conservative, fz = hx
qQ(xi + yj + zk)
36. (a) F(x, y, z) =
4π 0 (x2 + y 2 + z 2 )3/2
qQ
(b) F = ∇φ, where φ = − ,
4π 0 (x2 + y 2 + z 2 )1/2
qQ 1 1
so W = φ(3, 1, 5) − φ(3, 0, 0) = −√ .
4π 0 3 35
qQ[0 + t + 25t] dt
C : x = 3, y = t, z = 5t, 0 ≤ t ≤ 1; F · dr =
4π 0 (9 + t2 + 25t2 )3/2
1
26qQt dt qQ 1 1
W = = √ −
0 4π 0 (26t2 + 9)3/2 4π 0 35 3](https://image.slidesharecdn.com/chapter16-121017125944-phpapp01/75/Chapter-16-34-2048.jpg)




























![Cálculo ii howard anton - capítulo 16 [tópicos do cálculo vetorial]](https://cdn.slidesharecdn.com/ss_thumbnails/clculoii-howardanton-captulo16tpicosdoclculovetorial-141009135024-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)