Download to read offline

![ALGORITHM SelectionSort(A[0..n − 1])
//Sorts a given array by selection sort
//Input: An array A[0..n − 1] of orderable elements
//Output: Array A[0..n − 1] sorted in nondecreasing order
for i ← 0 to n − 2 do
min ← i
for j ← i + 1 to n − 1 do
if A[j ]<A[min] min ← j
swap A[i] and A[min]](https://image.slidesharecdn.com/brute-forceindaa-200318162515/75/Brute-force-5-2048.jpg)


![ALGORITHM BubbleSort(A[0..n − 1])
//Sorts a given array by bubble sort
//Input: An array A[0..n − 1] of orderable elements
//Output: Array A[0..n − 1] sorted in nondecreasing order
for i ← 0 to n − 2 do
for j ← 0 to n − 2 − i do
if A[j + 1]<A[j ]
swap A[j ] and A[j + 1]](https://image.slidesharecdn.com/brute-forceindaa-200318162515/75/Brute-force-8-2048.jpg)




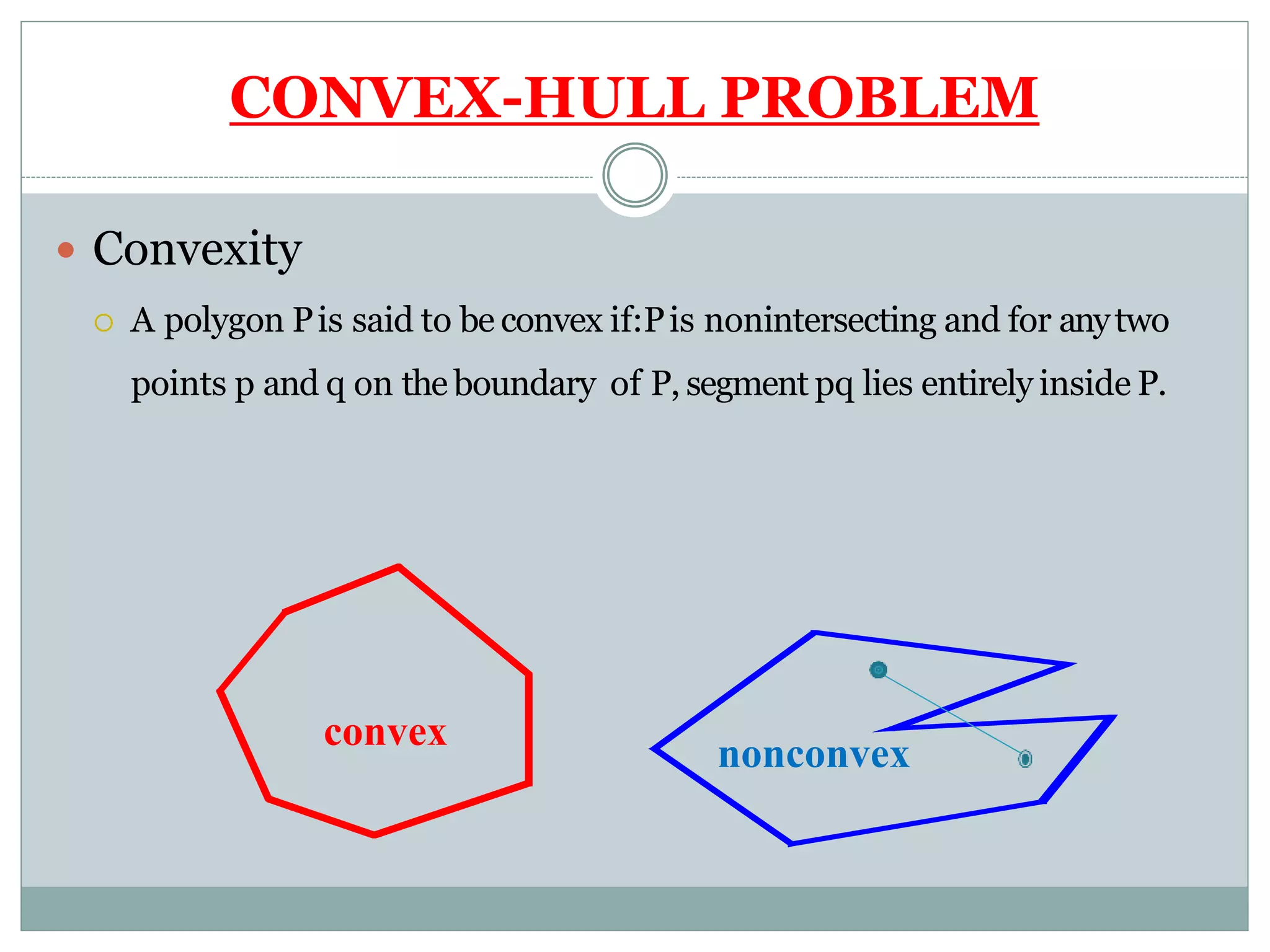







The document discusses brute force algorithms. It provides examples of problems that can be solved using brute force, including sorting algorithms like selection sort and bubble sort. It then summarizes two geometric problems - the closest pair problem and the convex hull problem - and provides pseudocode for brute force algorithms to solve each problem. The time complexity of these brute force algorithms is O(n^3).