Downloaded 241 times




































![Group theory
The relationships among the symmetry elements can
be treated very elegantly in terms of group theory
A group in mathematics consists of a set of members
which obey the following four rules
Rule 1 The combination of any two members A
and B result in C ,which also belong to same group .
AB = C
Example water [ E, C2 , , ]
vv
vvC 2](https://image.slidesharecdn.com/chmqx7potoag46pbas9d-signature-382b56a6b5a44eeb9aca704658b1a9a3d308ac9d2694e5d458c17a66c31d2cd2-poli-180410203840/75/Symmetry-and-group-theory-50-2048.jpg)
![Group theory
The relationships among the symmetry elements can
be treated very elegantly in terms of group theory
A group in mathematics consists of a set of members
which obey the following four rules
Rule 1 The combination of any two members A
and B result in C ,which also belong to same group .
AB = C
Example water [ E, C2 , , ]
vv
vvC 2
vvC 2 vvC
2](https://image.slidesharecdn.com/chmqx7potoag46pbas9d-signature-382b56a6b5a44eeb9aca704658b1a9a3d308ac9d2694e5d458c17a66c31d2cd2-poli-180410203840/75/Symmetry-and-group-theory-51-2048.jpg)
![Group theory
The relationships among the symmetry elements can
be treated very elegantly in terms of group theory
A group in mathematics consists of a set of members
which obey the following four rules
Rule 1 The combination of any two members A
and B result in C ,which also belong to same group .
AB = C
Example water [ E, C2 , , ]
vv
vvC 2
vvC 2 vvC
2](https://image.slidesharecdn.com/chmqx7potoag46pbas9d-signature-382b56a6b5a44eeb9aca704658b1a9a3d308ac9d2694e5d458c17a66c31d2cd2-poli-180410203840/75/Symmetry-and-group-theory-52-2048.jpg)




































































































































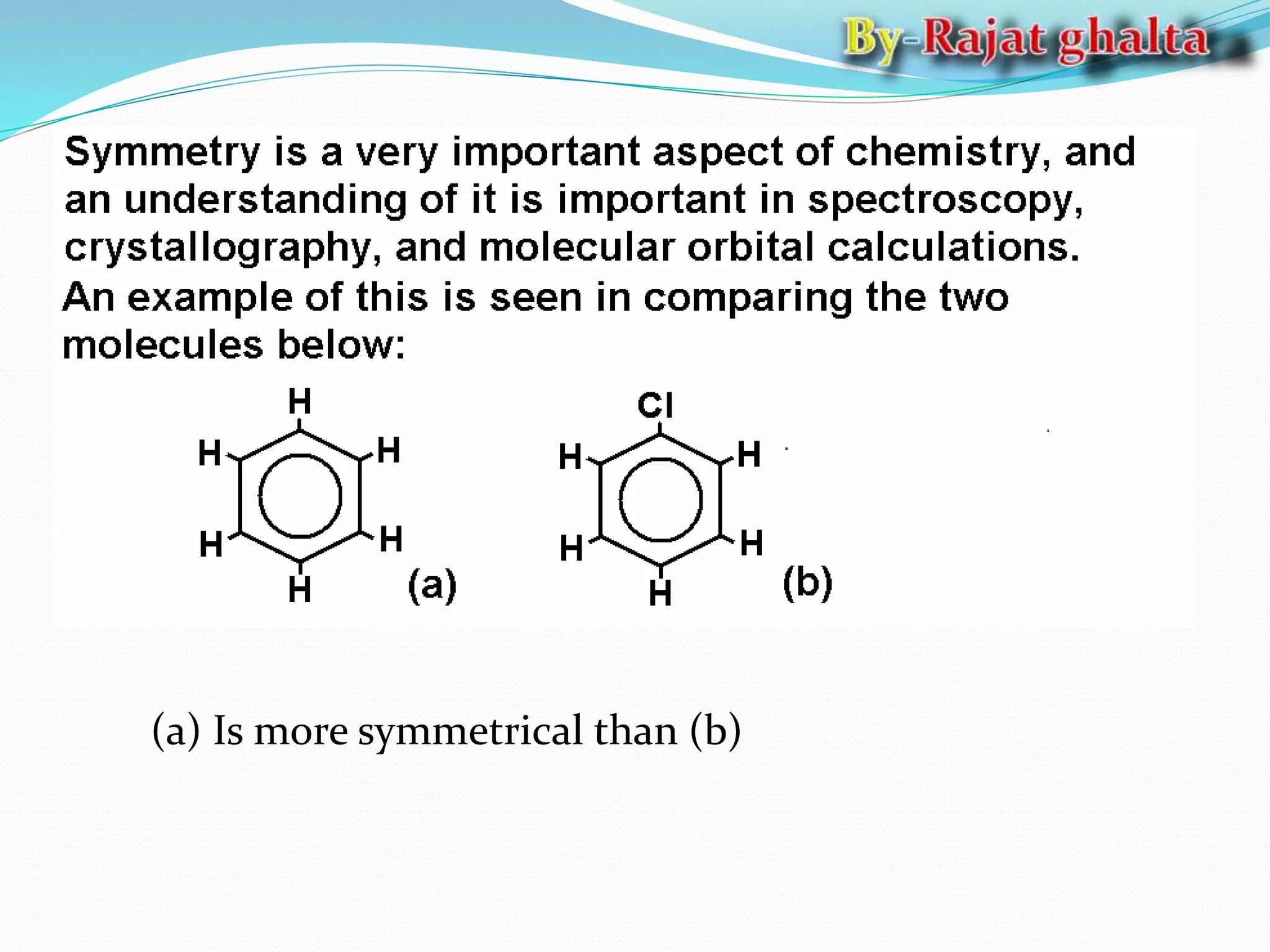
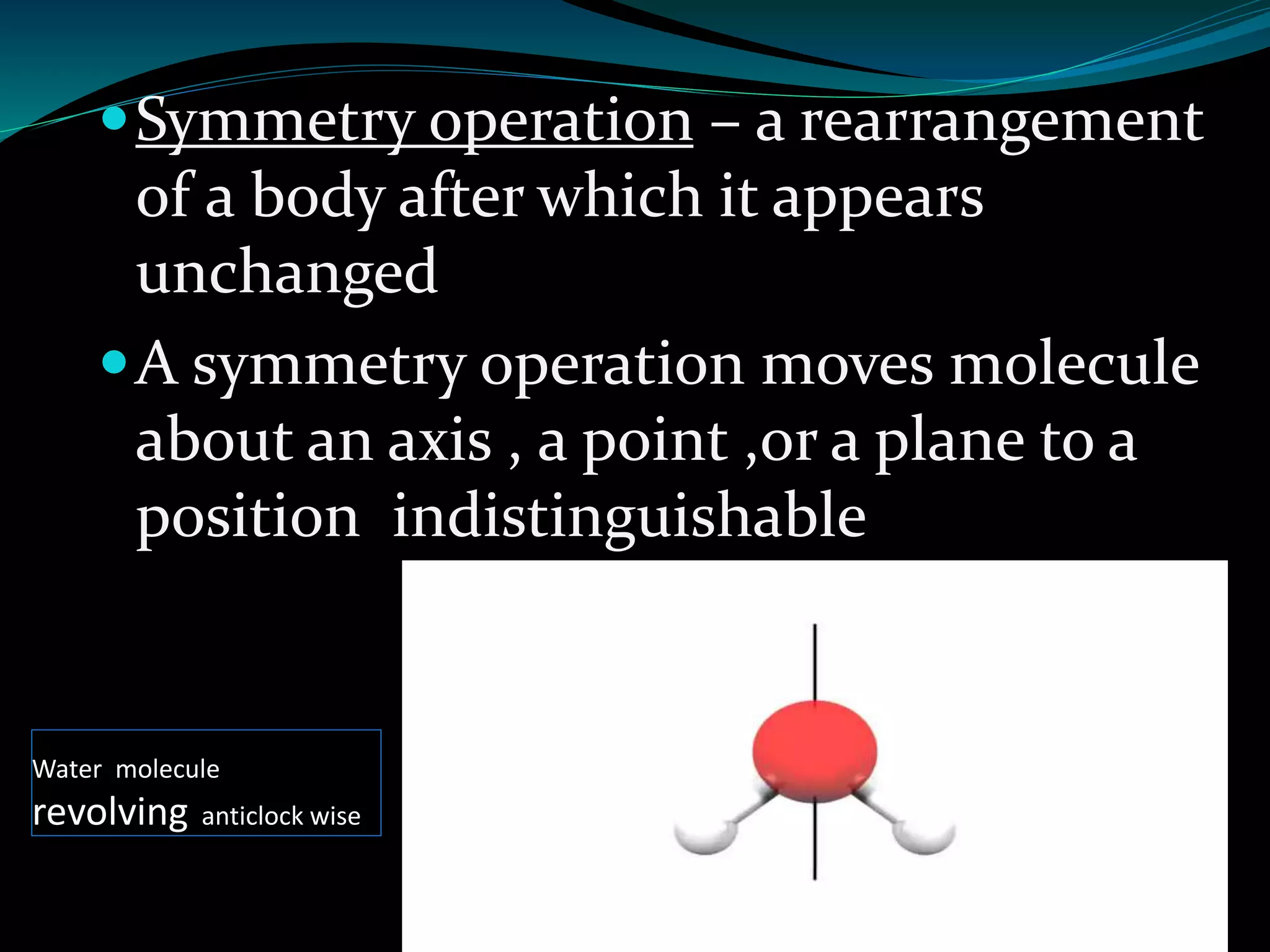
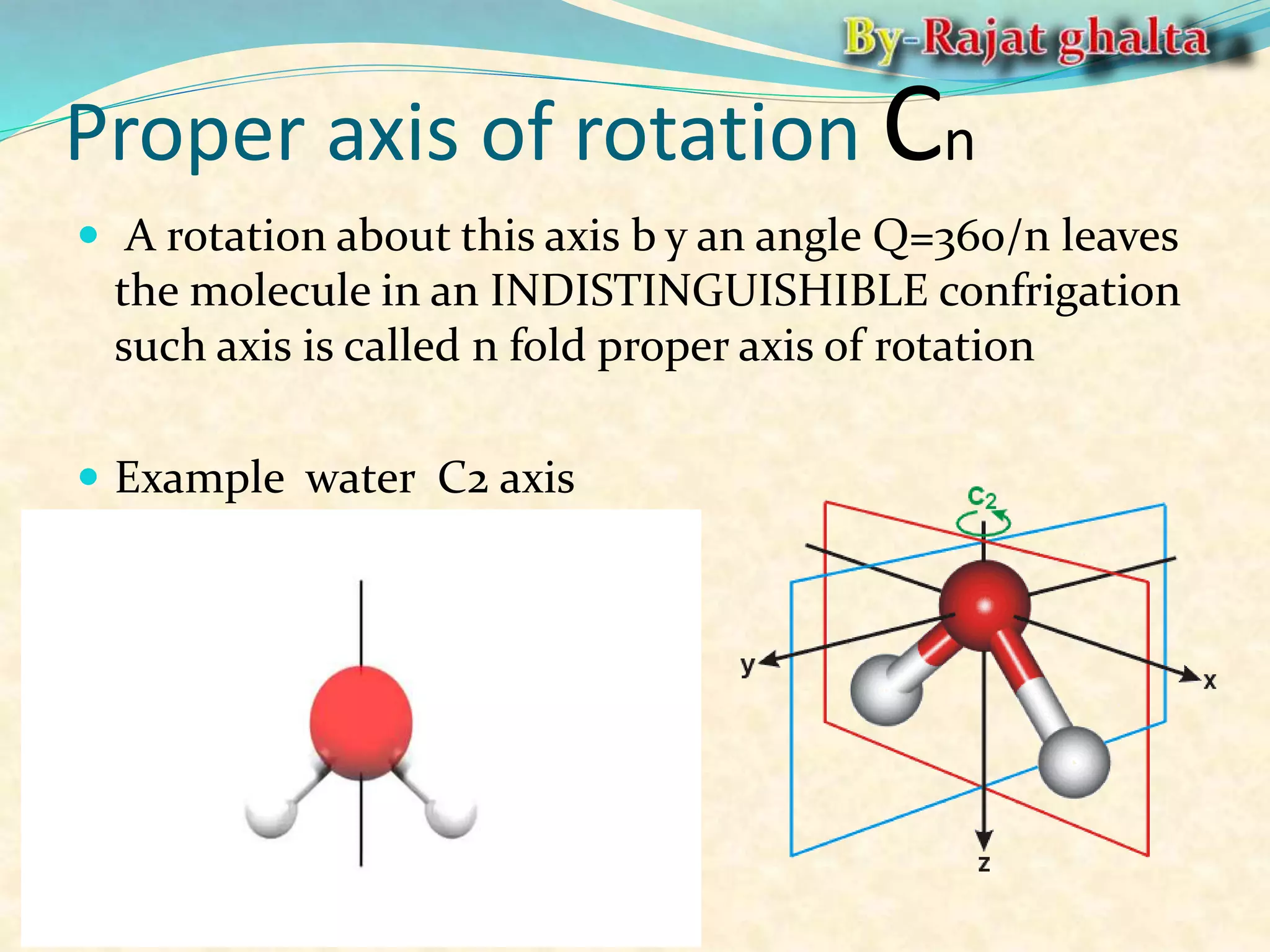
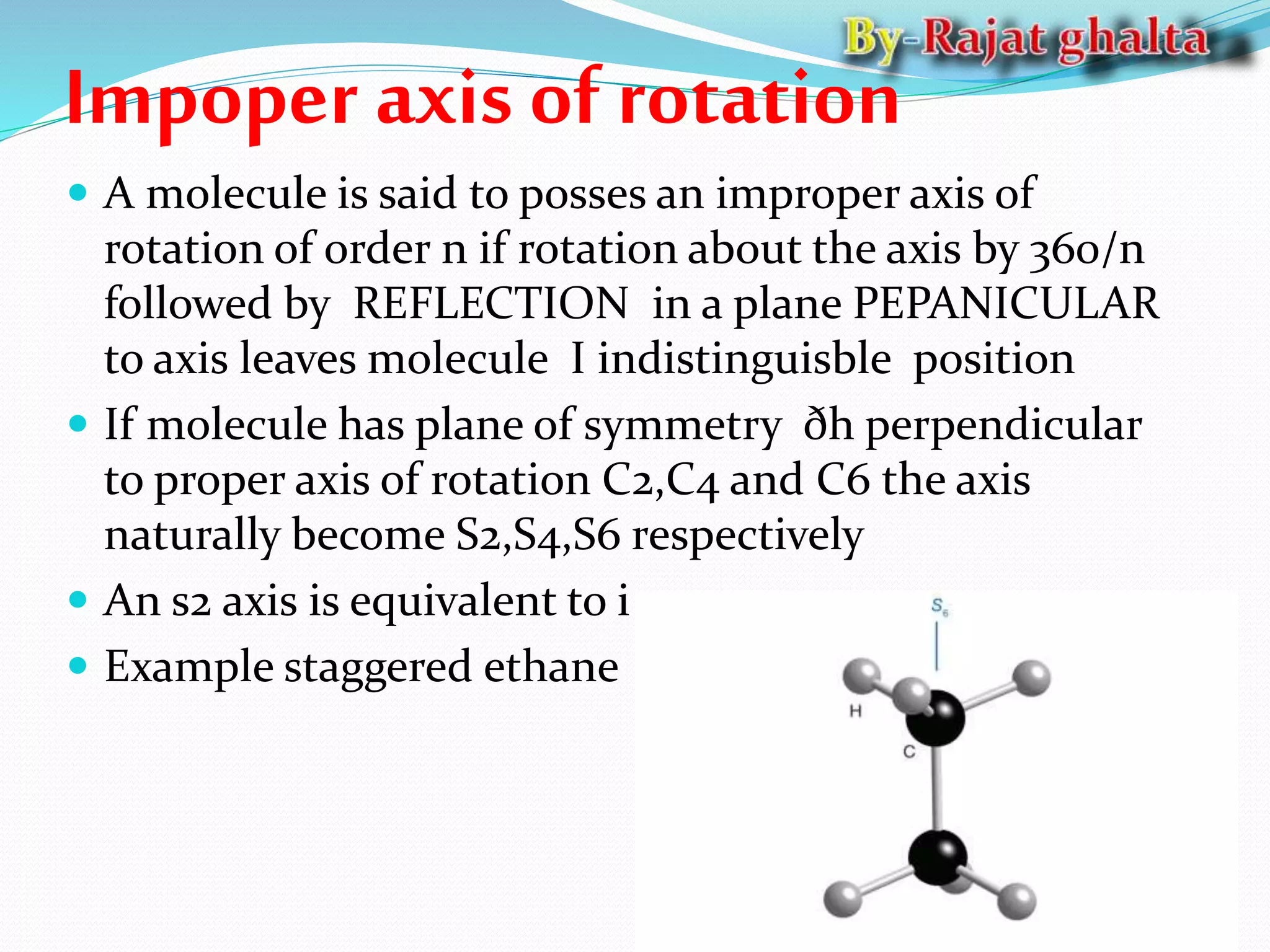
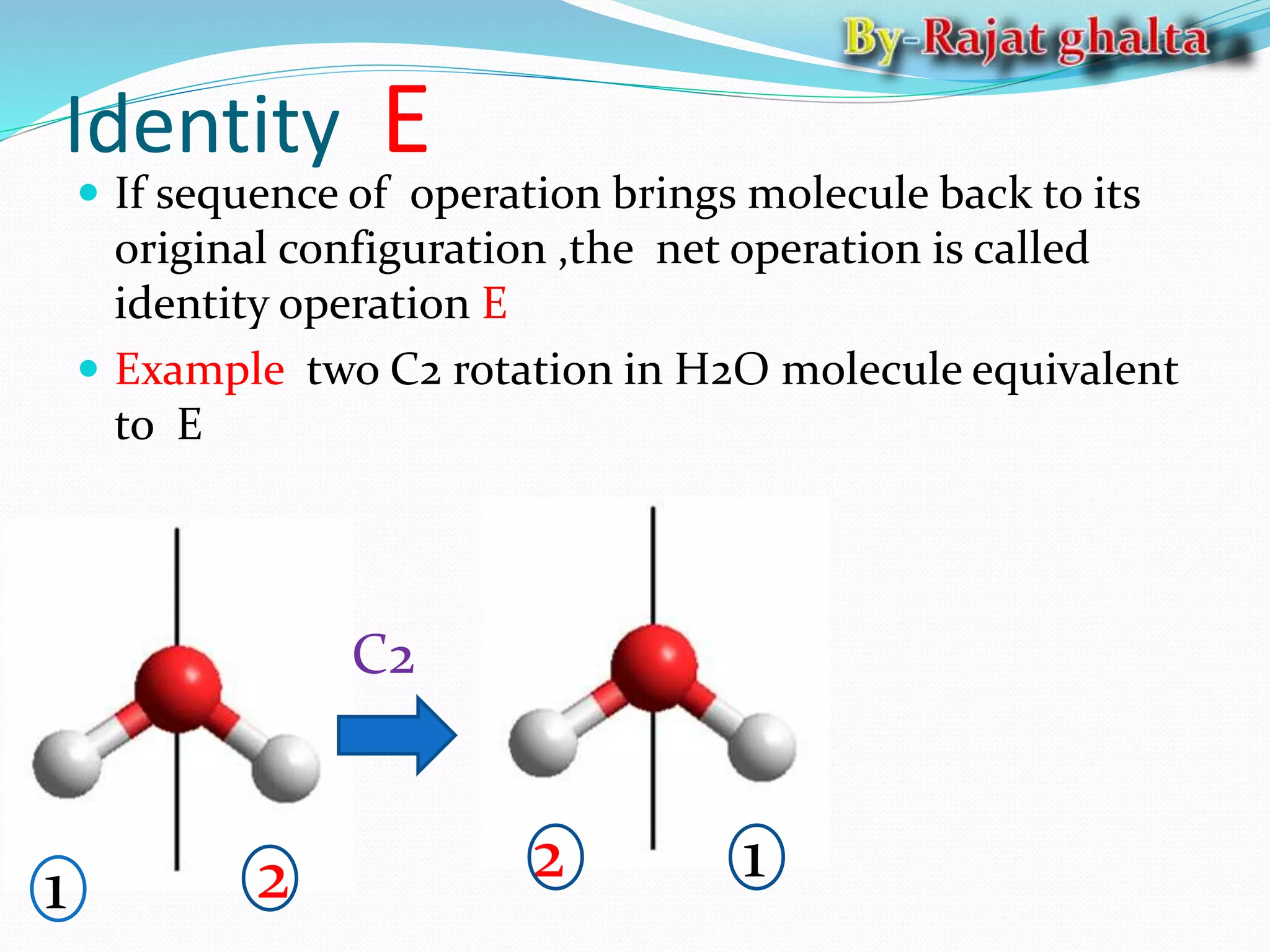
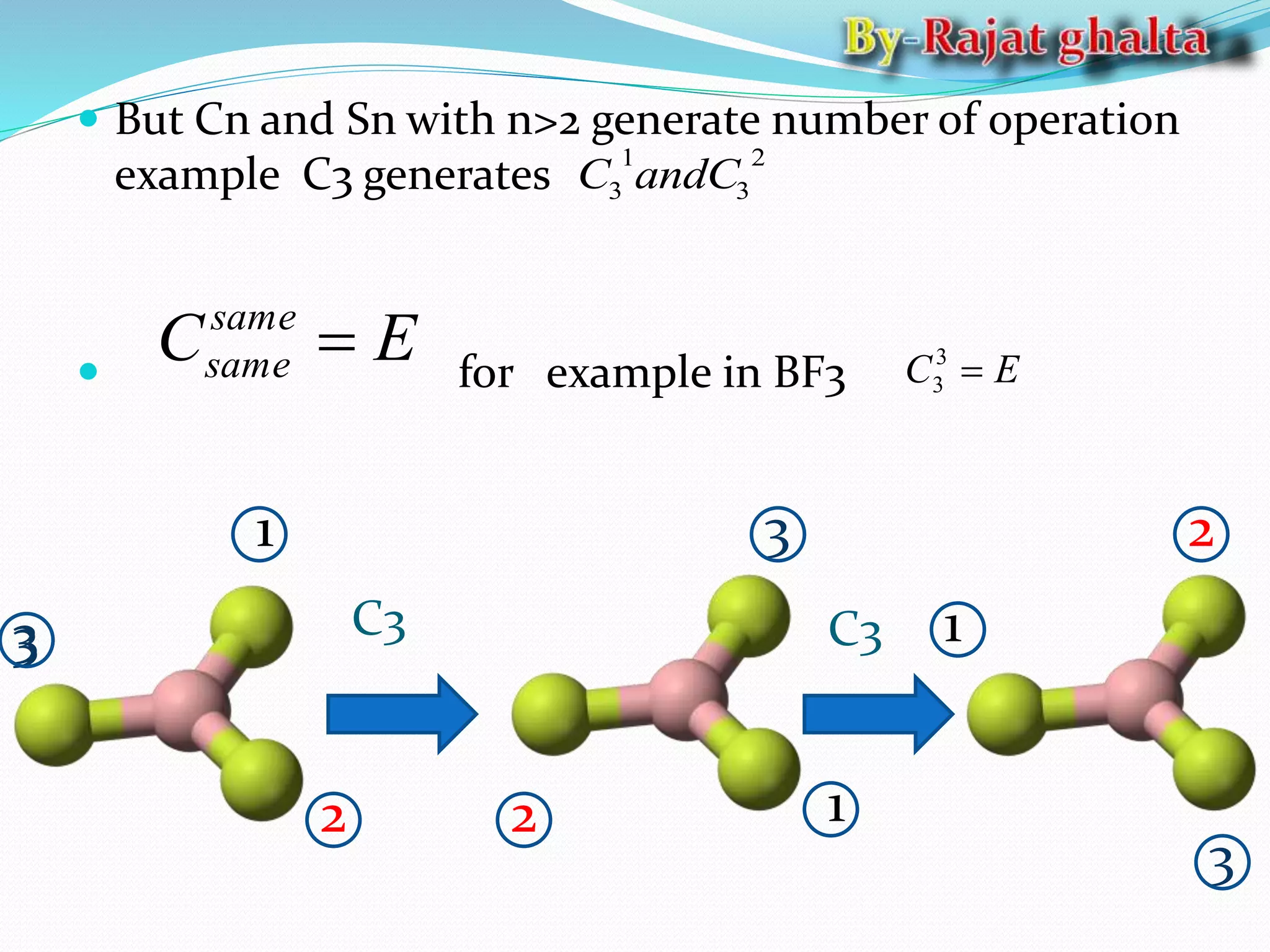
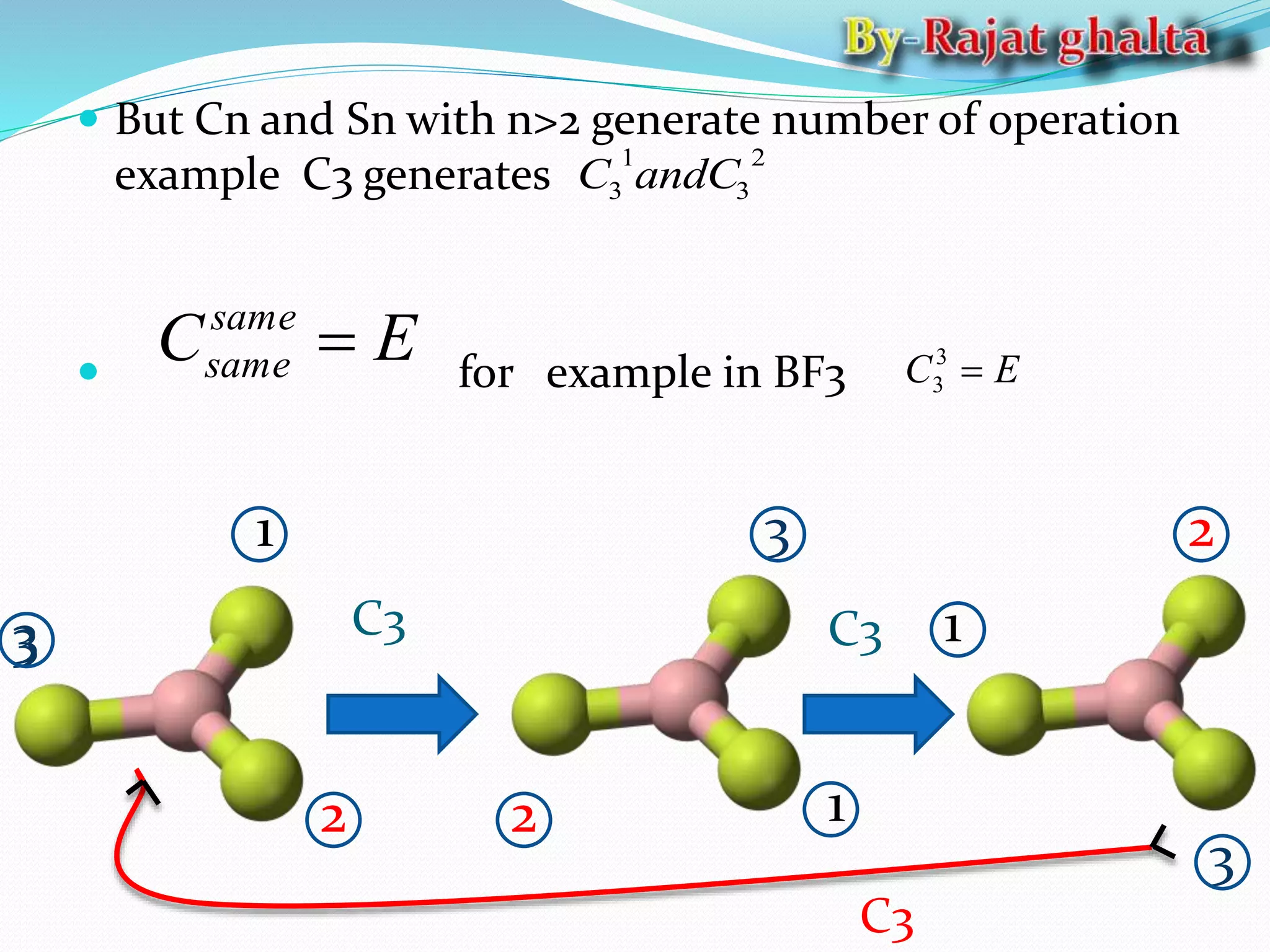
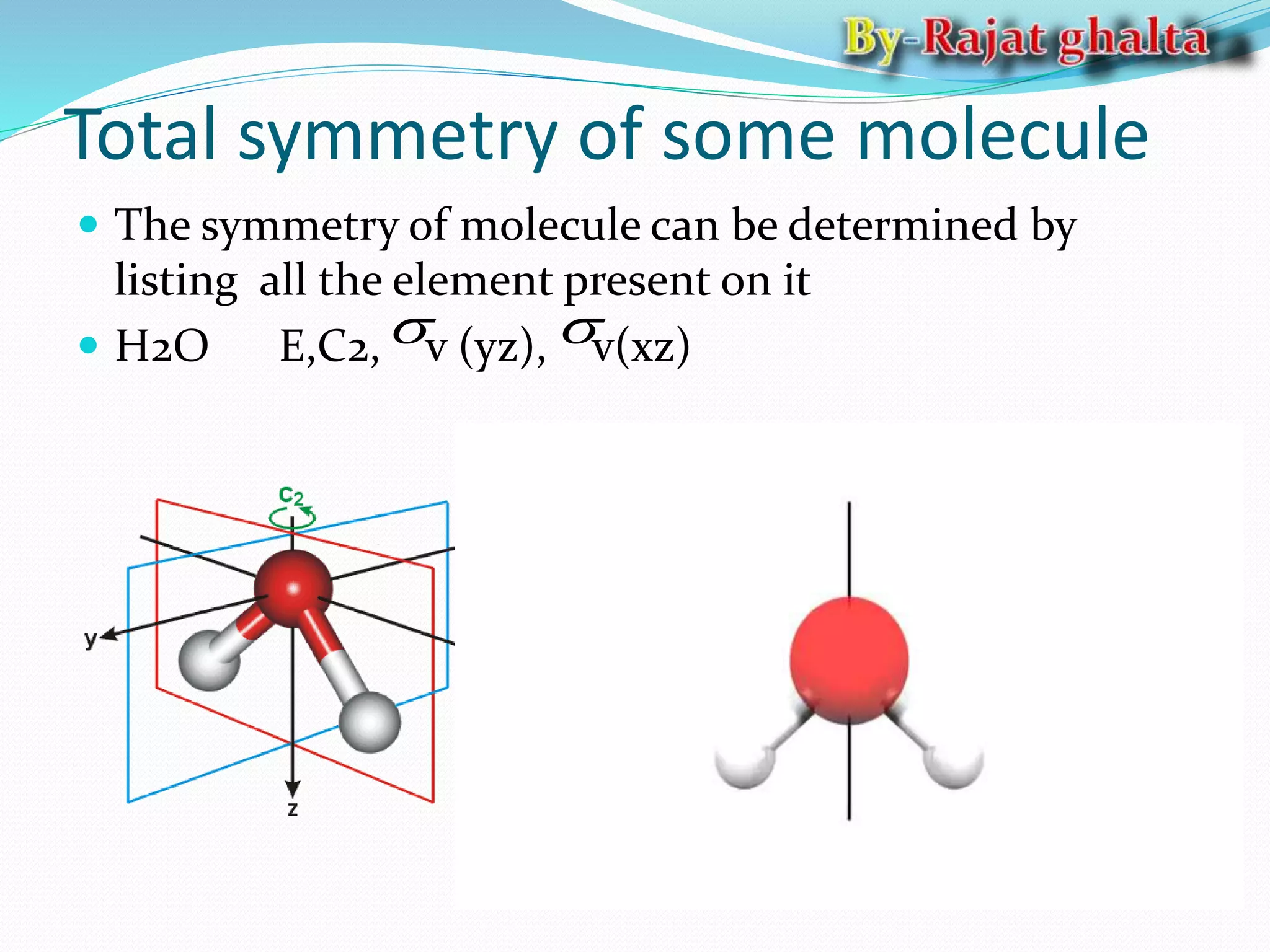
Symmetry is an important concept in science that is commonly observed in nature. It can be described through symmetry operations such as rotations, reflections, and inversions that leave an object in an indistinguishable position. Molecules exhibit different types of symmetry elements including axes of rotation, planes of symmetry, centers of inversion, and improper axes. Understanding molecular symmetry allows classification of molecules and their physical and chemical properties using the mathematical framework of group theory.



































































