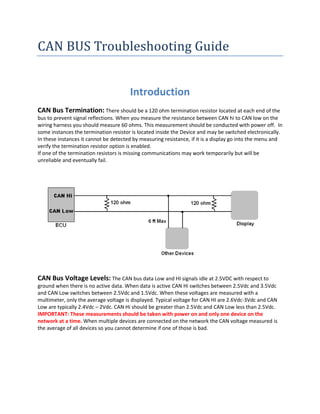
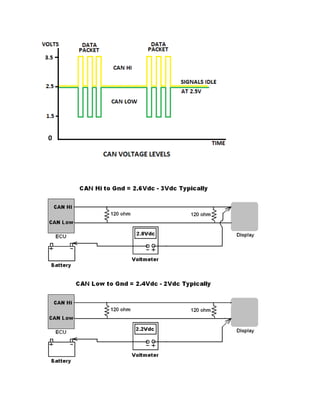
This document provides a troubleshooting guide for CAN bus issues. It discusses proper CAN bus termination, voltage levels, typical failures including missing termination resistors and reversed wiring. The guide outlines steps to check device configuration settings like baud rate and addresses. It describes how to verify network termination resistance and check CAN voltages with only one device powered. The procedure recommends inspecting for reversed wiring if CAN high is not greater than CAN low. Steps are given to check the CAN port of a device if the voltage is low, including measuring pin resistances to identify shorts.












































![Can%20on%20the%20 Avr[1]](https://cdn.slidesharecdn.com/ss_thumbnails/can20on20the20avr1-091124101825-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






















