Downloaded 307 times



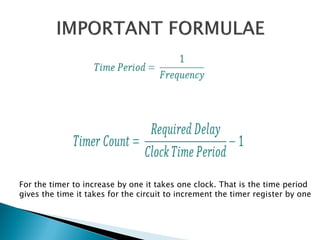
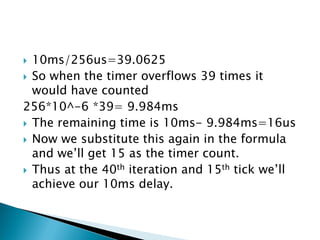

Timers are important electronic components used in microprocessors and microcontrollers to generate precise timing and delays. They work by counting clock signals and can be classified based on their mode of operation and maximum count. Timers are commonly implemented using flip flops and are used across many applications that require timing functions. Microcontrollers typically contain multiple timers that can be configured and programmed for applications requiring accurate timing and delays.