Downloaded 1,865 times
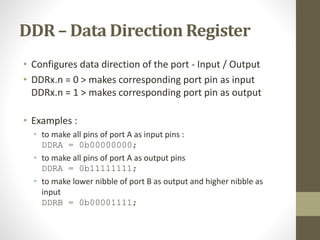
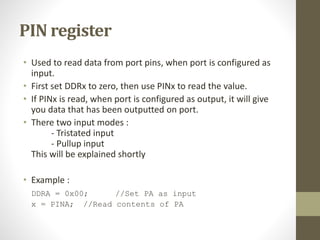
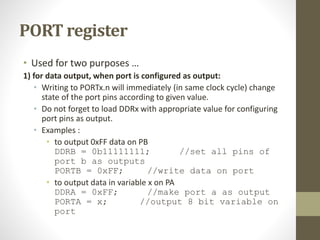
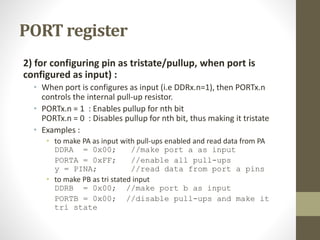
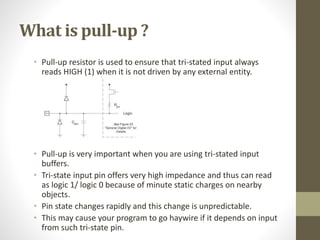
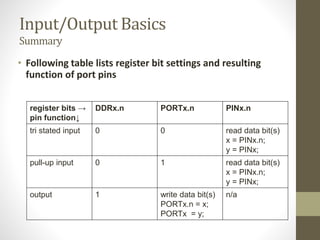
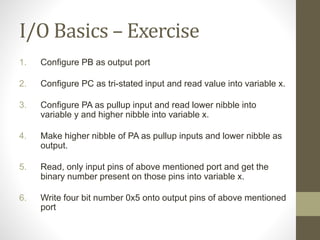
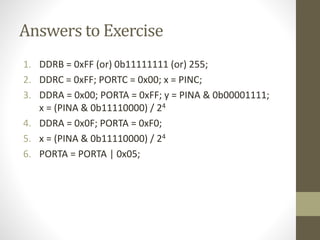

The document discusses the features and input/output basics of the AVR ATmega16 microcontroller. Key points include its Harvard architecture, 8-bit design, timers, ADC, and protocol support. It describes compiler tools, programming hardware, and pin configuration registers like DDR, PORT, and PIN. The DDR register sets the pin directions, PORT is used for output and pull-up configuration, and PIN reads pin states. Pull-up resistors prevent floating inputs. An exercise demonstrates configuring ports for different I/O functions.