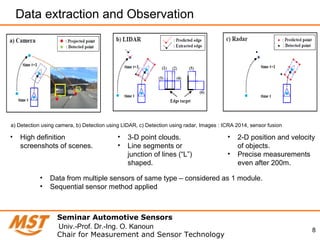
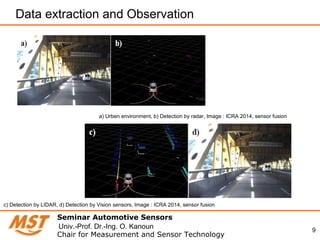

The document outlines a seminar on autonomous driving, focusing on the importance of automotive sensors and their role in enhancing safety by reducing human error-related accidents. It discusses system architecture, multi-sensor collaboration for effective object detection, and data extraction techniques. Additionally, it references various studies and sources to support the necessity of autonomous vehicles in modern transport.





















































































