Download as PDF, PPTX
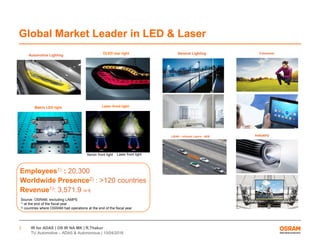





This document discusses infrared sensors for autonomous vehicles. It provides an overview of OSRAM, a leader in LED and laser technologies. It then discusses the sensing challenges for autonomous vehicles, including range, resolution, field of view, and computational challenges. It reviews sensor technologies like LIDAR, infrared cameras, and RADAR, and their applications in autonomous driving. It also explores concepts for low-cost LIDAR solutions using flash LIDAR and scanning LIDAR technologies.















































