Downloaded 296 times







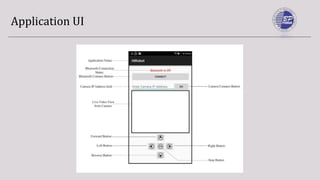

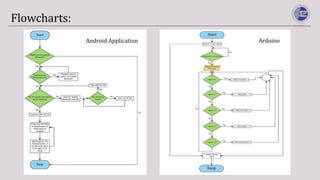

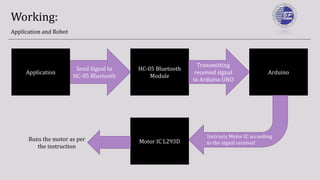


The final year project presents an 'Arduino Spy Robot' controlled via an Android application, designed to surveil areas through a spy camera and move in four directions wirelessly. The presentation details the project's objectives, hardware and software requirements, specifications, and future enhancements, highlighting the use of Bluetooth for communication. The robot's capabilities include live video streaming and wireless control, with aspirations for further advancements in technology.