Downloaded 48 times







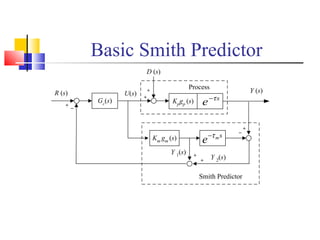








This document discusses dead-time compensation techniques for processes with time delays. It introduces the Smith predictor method for dead-time compensation and compares its performance to a conventional PID controller. An improved Smith predictor is also presented which incorporates a prediction error filter to better handle models that are not completely accurate. Simulation examples are provided comparing the different control techniques on processes with varying time delays.









































































![Rmf04303[1]](https://cdn.slidesharecdn.com/ss_thumbnails/rmf043031-150131195839-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)





