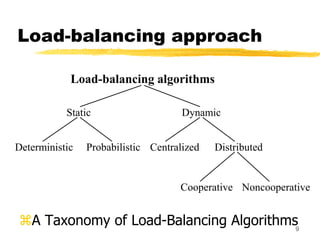
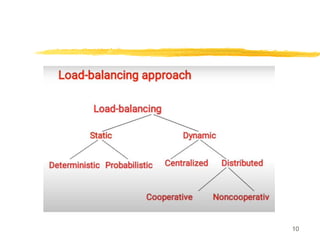
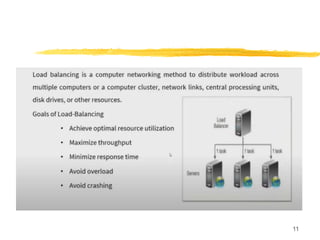
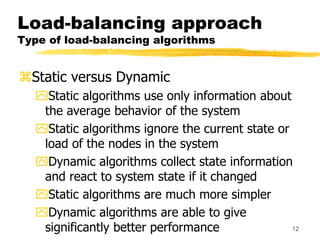
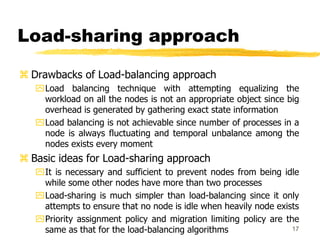
This document discusses resource management techniques in distributed systems. It describes three main approaches: task assignment, load balancing, and load sharing. Task assignment involves scheduling related tasks to optimize performance metrics like turnaround time. Load balancing aims to evenly distribute workloads across nodes to utilize resources efficiently. Load sharing is a simpler approach that prevents idle nodes when others are heavily loaded. The document also outlines desirable properties for scheduling algorithms and categorizes different types of load balancing techniques.