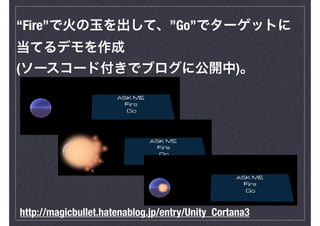
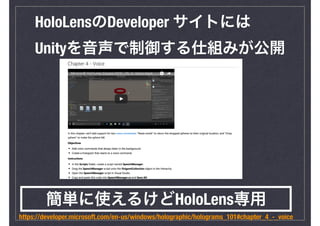
UNIBOOL LT大会(http://peatix.com/event/173495#_=_)で登壇させていただいたときの資料です。HoloLens向けアプリを作る方法、アプリ開発に活用できそうな、CortanaとUnityの連携方法について解説しています。





![まとめと今後の予定
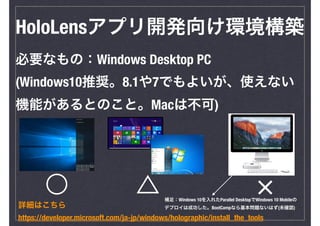
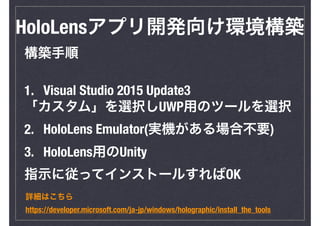
・HoloLensのアプリ開発環境構築の方法を紹介
10月開催のDigital Contents Expo@日本科学未来館に
コンテンツを出展(おそらくMeta2を使用)
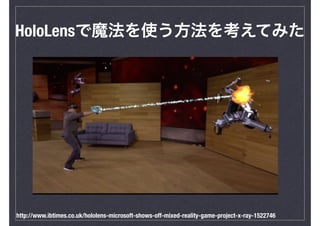
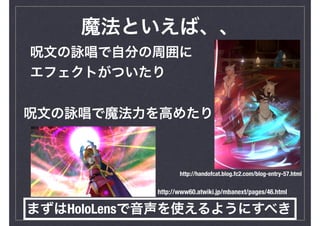
・HoloLensで魔法を使うゲームを作るために、
音声認識の機能、音声認識をUnityで使う方法を紹介
[まとめ]
[今後の予定]](https://image.slidesharecdn.com/20160723unibooklt-160723113527/85/20160723-unibook-lt-_-HoloLens-38-320.jpg)








![[Stack Overflow Dev Days 2015]Android 6.0 Marshmallow App Permissions 応用編](https://cdn.slidesharecdn.com/ss_thumbnails/stackoverflowdevdays201510android60newpermission20151009-151009095856-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)