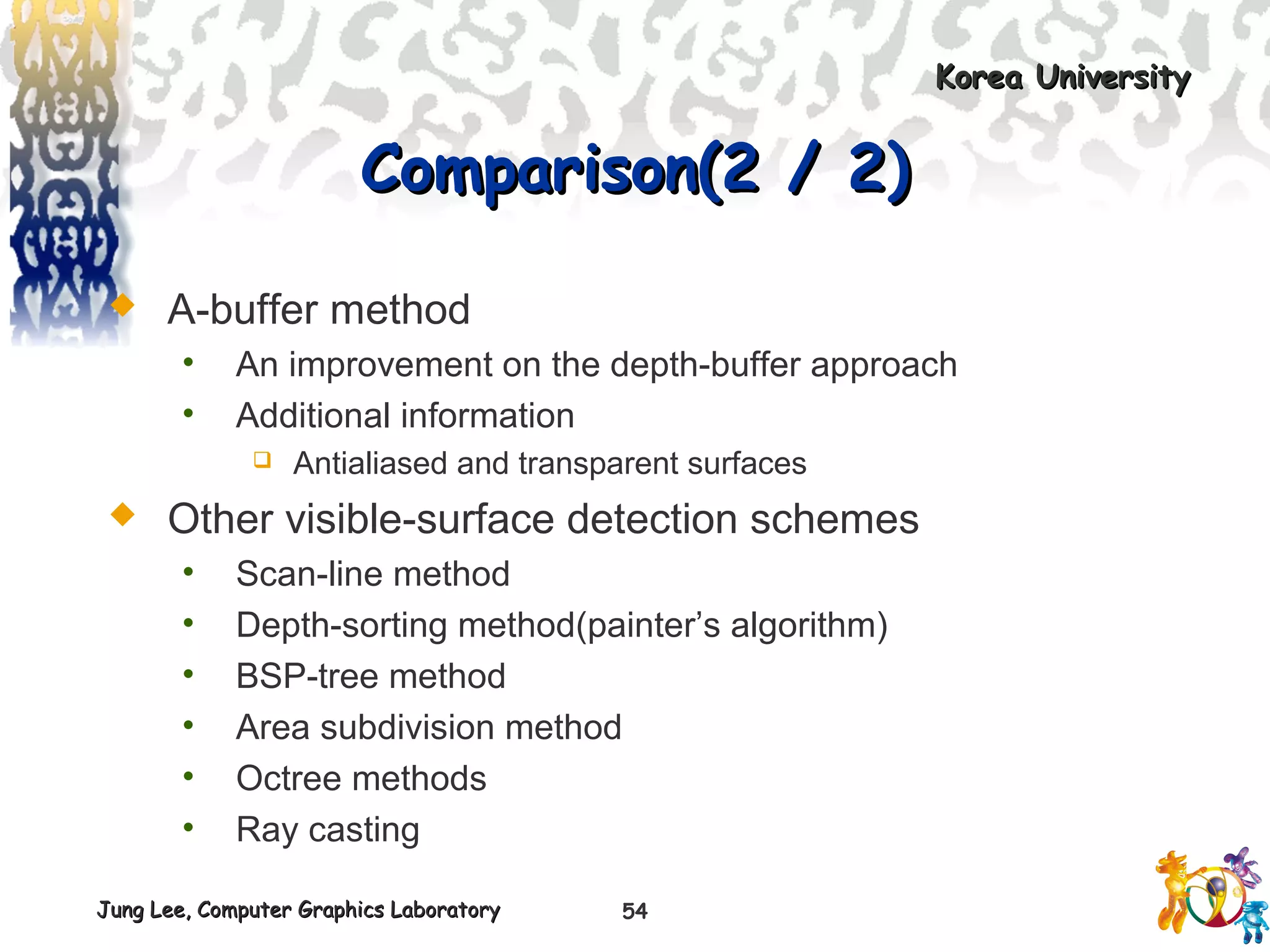
This document discusses various visible surface detection methods in computer graphics. It introduces common image-space and object-space classification methods. Specific algorithms covered include back-face detection, depth buffer, scan-line, depth sorting, and their characteristics and processes. The document concludes with a comparison of these visible surface detection methods.