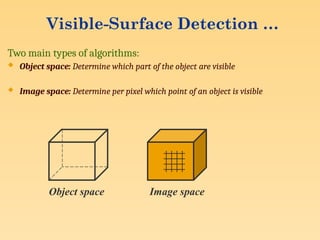
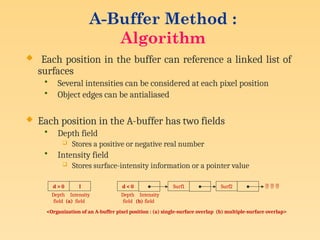
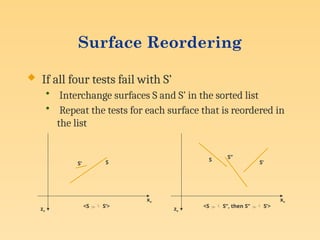
Visible surface detection methods, also known as hidden surface removal algorithms, are techniques used in computer graphics to determine which surfaces of 3D objects are visible from a specific viewpoint. These methods are crucial for creating realistic images by ensuring that only the visible portions of objects are displayed, hiding surfaces that are obstructed by others.