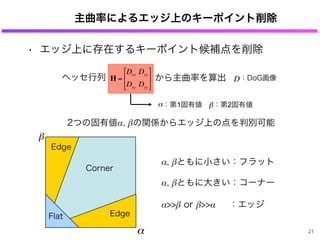
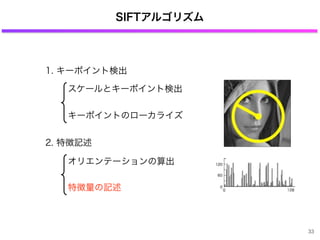
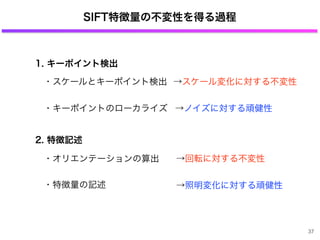
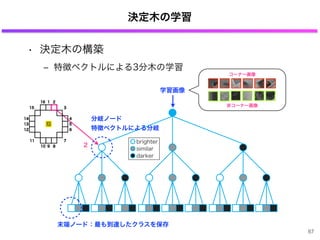
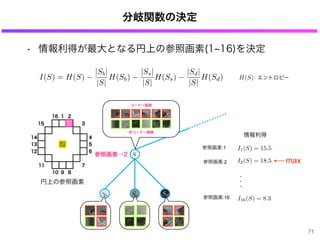
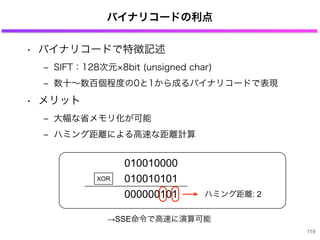
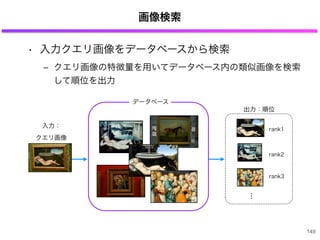
Harrisのコーナー検出
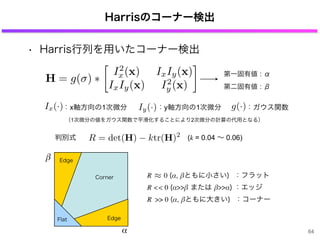
• Harris行列を用いたコーナー検出
64
第一固有値 :α
第二固有値 : β
Edge
EdgeFlat
Corner
α
β
R 0 (α, βともに小さい) :フラット
R << 0 (α>>β または β>>α) :エッジ
R >> 0 (α, βともに大きい) :コーナー
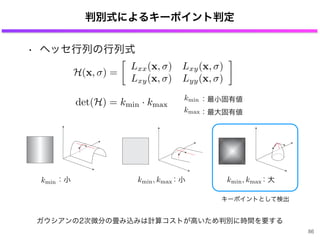
H = g( )
I2
x(x) IxIy(x)
IxIy(x) I2
y (x)
⇥
:ガウス関数Ix(·) Iy(·) g(·):y軸方向の1次微分:x軸方向の1次微分
(1次微分の値をガウス関数で平滑化することにより2次微分の計算の代用となる)
R = det(H) ktr(H)2判別式 (k = 0.04 ∼ 0.06)
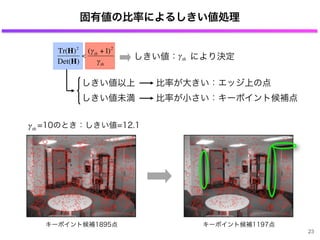
65.
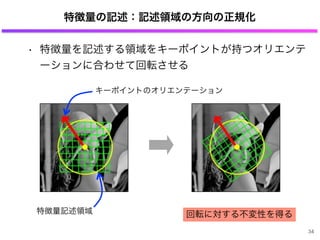
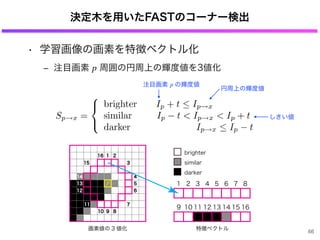
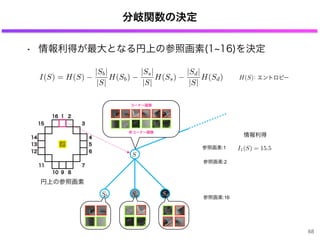
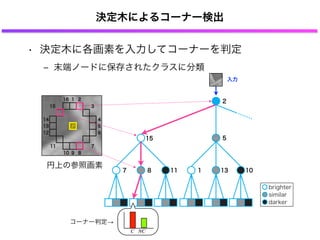
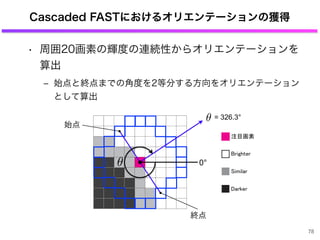
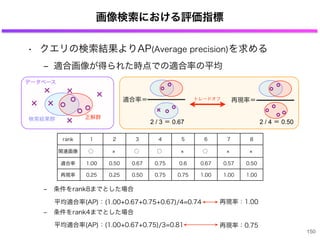
• 注目画素 pの周辺の円周上の16画素を観測
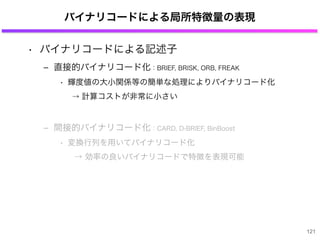
FAST: Features from Accelerated Segment Test [Rosten2010]
65
注目画素 p がコーナーである条件
p の輝度値と比較して円周上の輝度値が連続してn 個以上が
しきい値 t 以上 明るい,もしくは暗い (図中の破線)
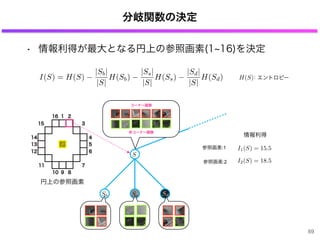
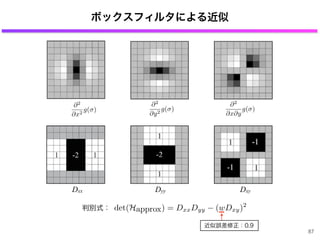
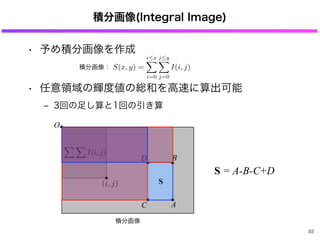
• 予め積分画像を作成
• 任意領域の輝度値の総和を高速に算出可能
‒3回の足し算と1回の引き算
O
積分画像(Integral Image)
A
B
C
D
S
I(i, j)
(i, j)
S = -B-C+DA
88
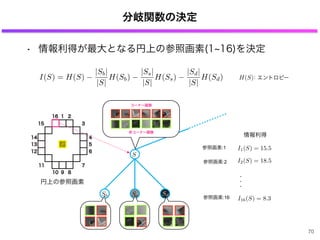
積分画像
S(x, y) =
i x
i=0
j y
j=0
I(i, j)積分画像:
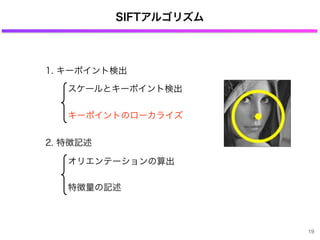
1.SIFT関連の参考文献
‒ [Lowe2004] D.G. Lowe, Distinctive image features from scale-invariant keypoints , Int.Journal of
Computer Vision,Vol.60, No.2, pp.91-110, 2004.
‒ [Lindeberg1998] T. Lindeberg, "Feature detection with automatic scale selection", Int.Journal of
Computer Vision, Vol. 30, No. 2, pp. 79-116, 1998.
‒ [高木2008] 高木雅成, 藤吉弘亘, SIFT特徴量を用いた交通道路標識認識 , 電気学会論文誌, Vol. 129-C, No. 5,
pp. 824-831, 2009.
‒ [Csurka2004] G. Csurka, C. Bray, C. Dance, L. Fan, Visual categorization with bags of keypoints ,
Workshop on Statistical Learning in Computer Vision,European Conference on Computer Vision, pp.
1‒22, 2004.
‒ [Brown2007] M. Brown, D. G. Lowe, Automatic Panoramic Image Stitching using Invariant Features ,
Int.Journal of Computer Vision,Vol. 74,
No.1, pp.59-73, 2007.
‒ [Mikolajczyk2005] K. Mikolajczyk, C. Schmid, GLOH A performance evaluation of local descriptors ,
IEEE tran. On Pattern Analysis and Machine Intelligence, pp.1615-1630, 2005.
‒ [Tola2007] E. Tola, V. Lepetit, F. Pascal, A Fast Local Descriptor for Dense Matching , Computer
Vision and Pattern Recognition, 2008.
155
156.
2.キーポイント検出器の参考文献
‒ [Bay2006] B.Herbert, T. Tinne, G. Luc, SURF: Speeded Up Robust Features. European Conference
on Computer Vision , pp.404‒417, 2006.
‒ [Grabner2006] M. Grabner, H. Grabner, and H. Bischof, Fast Approximated SIFT, Asian Conference
on Computer Vision, pp.918‒927, 2006.
‒ [Sinha2006] S. N. Sinha, J. Frahm, M. Pollefeys, and Y. Genc, GPU-based Video Feature Tracking And
Matching, Workshop on Edge Computing Using New Commodity Architectures, 2006.
‒ [Mikolajczyk2004] K. Mikolajczyk, C. Schmid, Scale & affine invariant interest point detectors.
Int.Journal of Computer Vision , pp.63‒86, 2004.
‒ [Matas2007] J. Matas, O. Chum, M. Urban, T. Pajdla, Robust Wide Baseline Stereo from Maximally
Stable Extremal Regions , British Machine Vision Conference. pp. 384‒393, 2002.
‒ [Rosten2010] E. Rosten, R. Porter, T. Drummond, Faster and Better: A Machine Learning Approach
To Corner Detection , IEEE tran. On Pattern Analysis and Machine Intelligence, pp. 105-119, 2010.
‒ [長谷川2013] 長谷川昂宏, 山内悠嗣, 藤吉弘亘, 安倍満, 吉田悠一, Cascaded FASTによるキーポイント検出 ,
画像センシングシンポジウム, 2013.
156
157.
3.キーポイント記述子の参考文献
‒ [Mikolajczyk2005] K.Mikolajczyk and C. Schmid, A Performance Evaluation of Local Descriptors,
IEEE Transactions on Pattern Analysis and Machine Intelligence, vol.27, no. 10, pp.31‒47, 2005.
‒ [Tola2008] E. Tola, V. Lepetit, F. Pascal, A Fast Local Descriptor for Dense Matching , Computer
Vision and Pattern Recognition, 2008.
‒ [Ke2004] Yan Ke, Rahul Sukthankar, PCA-SIFT: A more distinctive representation for local image
descriptors , Computer Vision and Pattern Recognition, pp.506-503, 2004.
‒ [Bay2006] H. Bay, T. Tuytelaars, L. Van Gool, SURF: Speeded Up Robust. Features , European
Conference on Computer Vision , pp.404-417, 2006.
‒ [M.Calonder2010] M. Calonder, V. Lepetit, C. Strecha, P. Fua, BRIEF: Binary Robust Independent
Elementary Features , European Conference on Computer Vision, pp.778-792, 2010.
‒ [Leutenegger2011] S. Leutenegger, M. Chli, R. Y. Siegwart BRISK: Binary Robust Invariant Scalable
Keypoints , Int. Conference on Computer Vision, 2011.
‒ [Rublee2011] E.Rublee, V.Rabaud, K.Konolige, G.Bradski ORB: an efficient alternative to SIFT or
SURF , Int.Conference on Computer Vision, 2011.
‒ [Alahi2012] A. Alahi, R. Ortiz, P. Vandergheynst, FREAK: Fast Retina Keypoint , IEEE Conference on
Computer Vision and Pattern Recognition, 2012.
‒ [Ambai2011] M. Ambai, Y. Yoshida, CARD: Compact And Real-time Descriptors , Int. Conference on
Computer Vision, 2011.
157
158.
3.キーポイント記述子の参考文献
‒ [Trzchinski2012] T.Tomasz, L. Vincent, Efficient Discriminative Projections for Compact Binary
Descriptors , European Conference on Computer Vision,
pp.228‒242, 2012.
‒ [Trzcinski2013] T. Tomasz, M. Christoudias, P. Fua, V. Lepetit, Boosting Binary Keypoint Descriptors ,
IEEE Conference on Computer Vision and Pattern Recognition, 2013.
158
159.
その他の参考文献
• 評価・実装
‒ [Heinly2012]J. Heinly, E. Dunn, J, Frahm, Comparative Evaluation of Binary Features , European
Conference on Computer Vision, 2012.
• チュートリアル
- Andrea Vedaldi, Jiri Matas, Krystian Mikolajczyk, Tinne Tuytelaars, Cordelia Schmid, Andrew
Zisserman, modern features: advances, applications and software , European Conference on
Computer Vision, 2012.
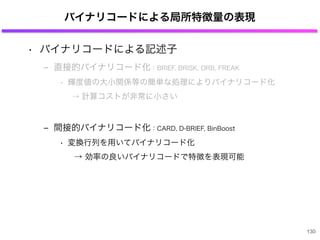
• 解説記事
- [藤吉2011] 藤吉 弘亘, 安倍 満, 局所勾配特徴抽出 -SIFT以降のアプローチ- , 精密工学会誌, Vol.77, No.
12, pp.1109-1116, 2011.
• サーベイ
- [Tuytelaars2008] T. Tuytelaars, K. Mikolajczyk, Local invariant feature detectors: a survey ,
Foundations and Trends® in Computer Graphics and Vision, Vol.3, No.3, 2008.
• Mendeley
- グループ名:ImageLocalFeature
159

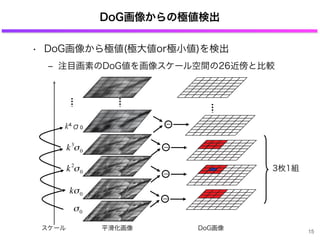
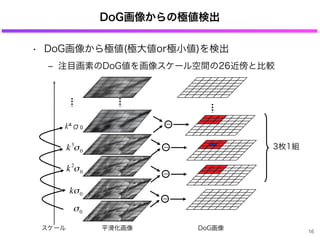
![Laplacian-of-Gaussianによるスケール探索 [Lindeberg1998]
• スケールσを変化させたLoGオペレータを適用
LoGオペレータ
€
LoG = f (σ) = −
x2
+ y2
− 2σ2
2πσ6
exp −
x2
+ y2
2σ2
⎛
⎝
⎜
⎞
⎠
⎟LoGオペレータ:
€
x,y
€
σ : スケール : 注目画素からの距離
スケール σ
LoG出力値
極大位置→特徴点のスケール
スケール探索
σ=3σ=6σ=9
7](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-7-320.jpg)

![サブピクセル推定によるスケールの変化
25
キーポイントのスケールσ
画像サイズの倍率 [%]
5000 300 700 900 1100 1300 1500
サブピクセル推定前
0
50
10
20
30
40
サブピクセル推定前
• ダウンサンプリングの影響によるスケール値を修正](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-25-320.jpg)
![26
キーポイントのスケールσ
画像サイズの倍率 [%]
5000 300 700 900 1100 1300 1500
サブピクセル推定前
サブピクセル推定後
0
50
10
20
30
40
サブピクセル推定後 サブピクセル推定前
サブピクセル推定によるスケールの変化
• ダウンサンプリングの影響によるスケール値を修正](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-26-320.jpg)




![SIFTの引用件数の推移 [Lowe2004]
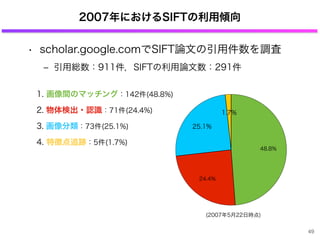
• scholar.google.com1でSIFT論文2の引用件数を調査3
1 http://scholar.google.com/
2 D. Lowe, Distinctive image features from scale-invariant keypoints , IJCV 04.
3 2013年7月1日時点 合計文献引用数 19,727件
48
0
1000
2000
3000
4000
2004 2005 2006 2007 2008 2009 2010 2011 2012
引用件数
前回のチュートリアル
911
19,727](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-48-320.jpg)


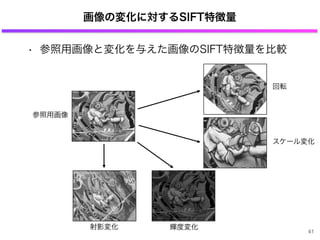
![特定画像を用いたSIFTによる物体認識 [Lowe2004]
1. テンプレートと入力画像の対応点
探索
2. テンプレートから検出された対応
点の位置・スケール・方向を一般
化ハフ変換により投票
3. 3点以上の投票点から入力画像と
テンプレート間のアフィンパラメ
ータ算出
Loweの物体認識アルゴリズム
テンプレート
入力画像
認識結果
• 特定画像(テンプレート)と入力画像間でSIFT特徴の
対応点探索による物体認識
52](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-52-320.jpg)
![SIFTを用いた交通道路標識の認識 [高木2007]
• 対応点のスケールとオリエンテーションを投票処理に利用
1. SIFT特徴量算出
2. 標識パターンと入力画像の対応点探索
3. 標識パターンの中心位置座標に投票 (対応点のスケール,オリエンテーション情報を使用)
4. 投票数のしきい値処理により標識認識
入力画像
:スケール
:回転
テンプレート画像
:特徴点
:基準点
Voting
53](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-53-320.jpg)
![54
SIFTを用いた交通道路標識の認識 [高木2007]](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-54-320.jpg)
![Autostitchによるモザイク画像生成 [Brown2007]
55
http://www.cs.bath.ac.uk/brown/autostitch/autostitch.html](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-55-320.jpg)

![キーポイント検出器の変遷
1999 2006 20132002
Cascaded FAST
[SSII13]
FAST の改良
1988
Harris [PAVC88]
ヘッセ行列を用いて
コーナー検出
Affine Invariant
特徴領域があらゆる変化に
対して頑健
[ECCV02]
MSER
2 値化による領域の検出
[BMVC02]MSER
2 値化による
領域の検出
[BMVC02]
Fast Hessian Detector
[ECCV06]SURF
決定木による出力値
[ECCV06]FAST
Difference-Gaussian
[ICCV99]SIFT 高速化
高速化
スケール変化アフィン変化回転
1998
Laplace-Gaussian
[IJCV98]LOG
1978
Hessian[ICPR78]
ヘッセ行列を用いて
特徴点検出
63](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-63-320.jpg)
![• 注目画素 p の周辺の円周上の16画素を観測
FAST: Features from Accelerated Segment Test [Rosten2010]
65
注目画素 p がコーナーである条件
p の輝度値と比較して円周上の輝度値が連続してn 個以上が
しきい値 t 以上 明るい,もしくは暗い (図中の破線)](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-65-320.jpg)
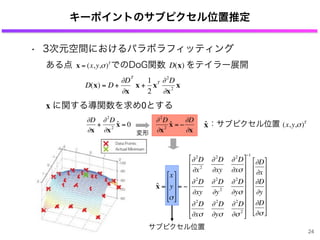
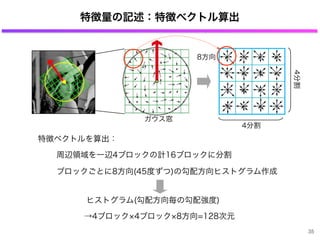
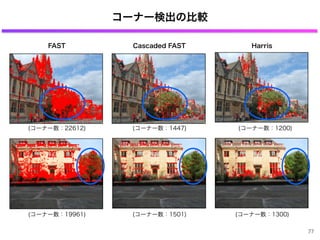
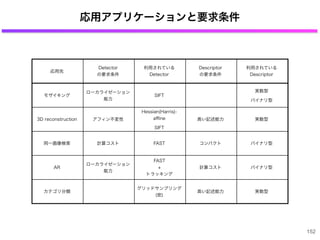
![コーナー検出
73
• Harris, FAST, FAST(Pyramid)の検出時間の比較
Harris FAST FAST(Pyramid)
コーナー数:80 コーナー数:164 コーナー数:285
処理時間:20.6 [ms] 処理時間:0.6 [ms] 処理時間:1.5 [ms]](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-73-320.jpg)

![TRUE TRUETRUE TRUETRUE
• 周囲{20, 16, 12}画素を参照するため3つの決定木を学習
‒ 決定木をカスケード状に並べて高速化
Cascaded FAST [長谷川2013]
76
周囲12画素を
参照する決定木
オリエンテーション
の類似性
オリエンテーション
算出
非コーナー非コーナー 非コーナー
TRUE
TRUE
コーナー
非コーナー
FALSE FALSE FALSE
FALSE
入力画像
非コーナー
TRUE
TRUE
コーナー
FALSE
周囲16画素を
参照する決定木
周囲20画素を
参照する決定木](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-76-320.jpg)

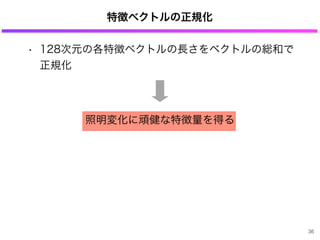
![2画像間の対応付けの速度比較
80
0 0.5 1.0 1.5 2.0 2.5
処理時間 [s]
キーポイント検出 特徴量記述 距離計算
0.286
0.181
0.002
0.018
0.301
0.154
0.025
0.022
1.448
0.483
0.423
0.137
2.035
0.818
0.450
0.177
(CPU : Intel Xeon X7452 2.67GHz)
SIFT
(ユークリッド距離)
SURF
(ユークリッド距離)
FAST+ORB
(ハミング距離)
Cascaded FAST+ORB
(ハミング距離)](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-80-320.jpg)
![SIFTアプローチの高速化
• アルゴリズムの改良
‒ SURF(Speeded Up Robust Features) [Bay2006]
‒ Box filter [Grabner2006]
• GPGPU(General-Purpose computation on GPUs)の利用
‒ GPU-Based Video Feature Tracking and Matching
[Sinha2006]
83](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-83-320.jpg)
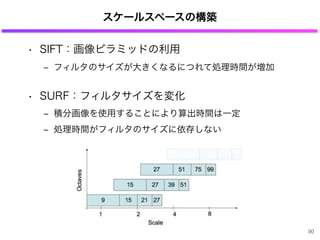
![極値探索近似ヘッセ行列の算出
•ボックスフィルタ
•積分画像
•scale: σ
SURF(Fast Hessian Detector)の処理の流れ [Bay2006]
1. 近似ヘッセ行列の算出
‒ ボックスフィルタによる近似
‒ ボックスフィルタを積分画像を用いて高速化
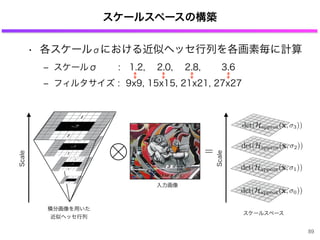
2. スケールスペースの構築
3. 極値探索によるキーポイント検出
84
入力画像 キーポイント
スケールスペースの構築
•scaleσの変更](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-84-320.jpg)
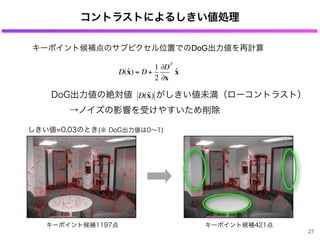
![• SIFT(DoG)とSURFを比較
キーポイント検出時間
92
SIFT(DoG) SURF
キーポイント数:79 キーポイント数:82
処理時間:1.212 [s] 処理時間:0.095 [s]](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-92-320.jpg)

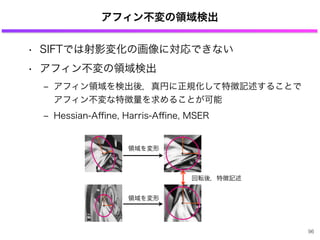
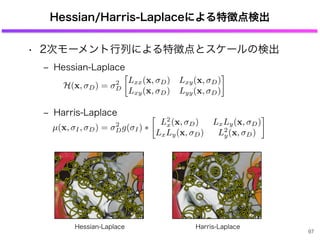
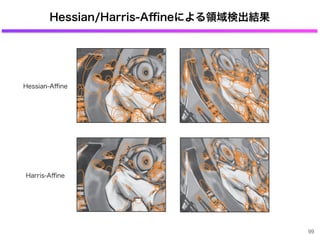
![反復処理によるアフィン領域の検出 [Mikolajczyk2004]
• 特徴点を中心とする局所パッチを繰り返し変形
1. Hessian/Harris-Laplace検出器により特徴点とスケールを検出
2. ヘッセ行列の固有値 から楕円領域を推定
3. 楕円領域が正円となるように局所パッチを変換
4. 変換された局所パッチから特徴点とスケールを再検出
5. 再検出された特徴点の固有値が等しい場合
→ 処理を終了
固有値が等しくない場合
→ 2へ戻る
98
( max, min)
( max min)
( max = min)
初期点 1回目 2回目 3回目
→局所パッチの変形を繰り返すことでアフィン変化に頑健な領域を検出
1
2
min
1
2
max
1
2
min
1
2
max
1
2
min1
2
max](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-98-320.jpg)
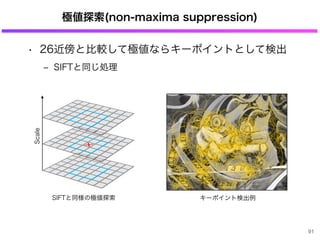
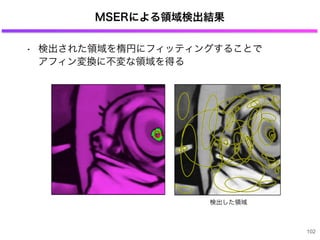
![MSER: Maximally Stable Extremal Regions [Matas2002]
• 輝度が類似した画素の領域に着目
- 閾値を徐々に変化させ,連続する2値画像を生成
- 各2値画像の連結領域を求める
- 連結領域の面積の変化が緩やかな領域を検出
2値化](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-100-320.jpg)
![領域に対する楕円のフィッティング
101
検出された領域
楕円をフィッティング
中心点m
x1 = (r1, c1), · · · , xn = (rn, cn)
m = [mr, mc] =
1
n
n
i=1
xi
領域内の点群:
楕円の中心点:
共分散行列:
=
1
n 1
n
i=1
(xi m)(xi m)T
• 検出された領域から共分散行列を計算
• 共分散行列の固有値と固有ベクトルにより楕円を決定](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-101-320.jpg)


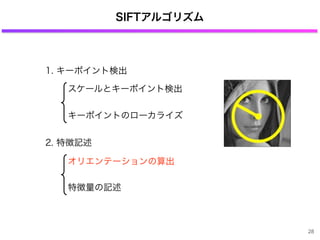
![キーポイント記述子の変遷
107
実数ベクトル
直接的バイナリ化間接的バイナリ化
バイナリコード
学習なし
教師あり
教師なし
1999 2006 2010 2011 2012 20132002
積分画像を用いた
Harr-like による輝度勾配
[ECCV06]SURF
勾配特徴の近似
勾配方向ヒストグラム
RIFF [CVPR10]
勾配方向ヒストグラム
[ICCV99]SIFT
直接的バイナリ化
間接的バイナリ化 ( 変換行列あり )
高速化
高速化
バイナリによる高速化
と省メモリ化
2 点の輝度差
BRIEF [ECCV10]
BRIEF の改良
BRISK [ICCV11]
FREAK[CVPR12]
人間の網膜モデル
を導入BRIEF の改良
ORB [ICCV11]
D-BRIEF
[ECCV12]
BRIEF の改良
BinBoost
[CVPR13]
Boosting を導入
Learning-based
Sparse Hashing
CARD [ICCV11]](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-107-320.jpg)
![特徴記述空間の分割パターン [Mikolajczyk2005][Tola2008]
• 分割された小領域ごとに勾配方向ヒストグラムを計算
110
SIFT GLOH DAISY
(Gradient Location and Orientation Histogram)
位置ずれに頑健 位置ずれに頑健
回転に頑健](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-110-320.jpg)
![PCA-SIFT [Ke2004]
• 局所領域の勾配情報に対して主成分分析(PCA)を適用
‒ キーポイント検出はSIFTと同じ
‒ 特徴ベクトルは36次元(実験から決定)
‒ SIFT特徴の頑健性の向上
PCA
36次元の特徴量
キーポイント検出
勾配情報
111](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-111-320.jpg)
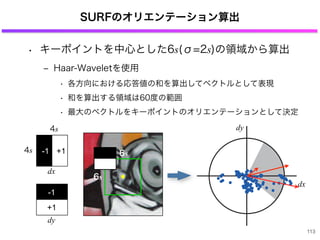
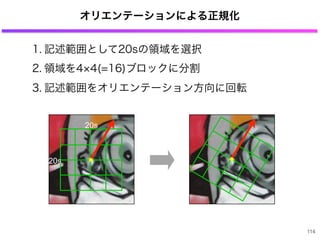
![SURF記述子による高速化 [Bay2006]
• オリエンテーションの算出
• オリエンテーションによる正規化
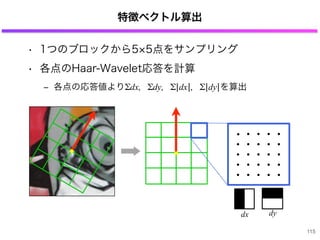
• Haar-wavelet応答の算出
‒ 積分画像を用いることで高速化
112](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-112-320.jpg)

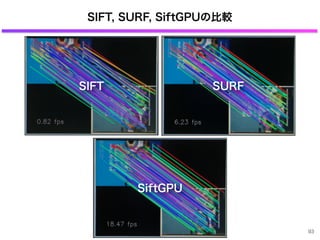
![記述子の計算速度とマッチング性能の比較 [Bay2006]
U-SURF SURF SURF-128 SIFT
255 354 391 1036
キーポイント記述子の処理時間 [ms]
U-SURF SURF SURF-128 SIFT GLOH PCA-SIFT
正解率 83.8 82.6 85.7 78.1 78.3 72.3
対応点マッチングの正解率 [%]
117](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-117-320.jpg)
![距離計算の速度比較
120
64ビット
128ビット
256ビット
512ビット
128次元
0 50 100 150 200 250 300 350
処理時間 [ns]
ハミング距離 [SSE4.2(_mm_popcnt_u64)]
ハミング距離 [8bitLUT]
ユークリッド距離の2乗
(CPU : Intel Xeon X7452 2.67GHz)
→SSE4.2popcntを用いると約10倍早い距離計算が可能
バイナリコード
によるハミング距離
実数ベクトルによる
ユークリッド距離](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-120-320.jpg)
![122
BRIEF [Calonder2010]
• バイナリコードの生成アルゴリズム
‒ パッチをガウシアンフィルタにより平滑化
‒ 事前にランダム選択したペア(2点)の画素値の大小関係から
バイナリ列を生成
ガウシアン分布に基づきペアを決定
キーポイント
パッチ](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-122-320.jpg)
![• 長距離ペアの平均ベクトルをオリエンテーションとして算出
• 短距離ペアの領域の輝度の大小関係から特徴量を記述
BRISKによる特徴量記述 [Leutenegger2011]
123
方向:暗い→明るい
長さ:輝度差
短距離ペア
オリエンテーション方向に回転
512bitのバイナリコードを生成
長距離ペアのベクトル](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-123-320.jpg)

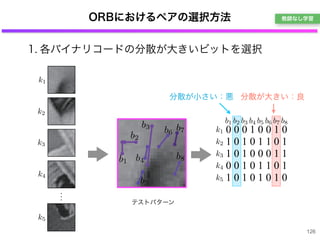
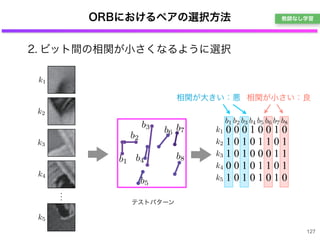
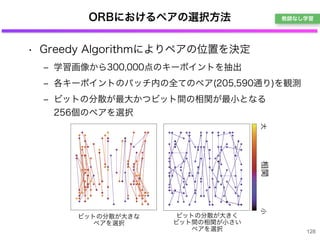
![ORB [Rublee2011]
• パッチ内のモーメントによりオリエンテーションを算出
• 学習により効率の良いペアを選択
1. ビットの分散が大きい
2. ペア同士の相関が低い
125
パッチ
Step 1.
学習画像を処理し,全ペアの分散を求め、分散
が最大となるペアを採用
Step 2.
残りのペアの中で,採用済みペアと相関が低く
かつ分散が最大となるペアを採用
Step 3.
ペアが256個選択されるまで,Step2を繰り返す
教師なし学習](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-125-320.jpg)
![FREAK(Fast Retina Keypoint) [Alahi2012]
• 人の網膜パターンを近似したモデルを使用
‒ 網膜は複数の受容野から構成される
‒ 特徴点の中心に近いほど小さな範囲を観測する受容野,
遠いほど大きな範囲を観測する受容野
• ORBと同様のアルゴリズムにより受容野のペアを選択
129
受容野
人の網膜 FREAKのモデル ペア選択パターン
教師なし学習](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-129-320.jpg)

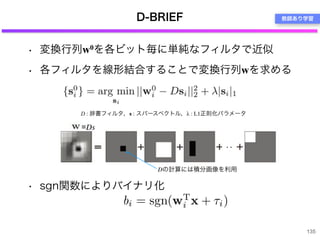
![CARD [Ambai2011]
• 136次元の特徴量dを128次元のバイナリコードbに変換
‒ バイナリコード変換前後の距離が保存されるように を最適化
• 元の情報を保持したバイナリコードを生成可能
• 高速なバイナリコード変換を実現するための拘束条件
‒ の要素は{-1,0,+1}のいずれかの値のみ
‒ の0要素が90%
132
たがって,図 9,10 に示した 2 種類のテーブ
とで,高速に勾配特徴量を算出できるように
(b)バイナリコード化
特徴ベクトルをバイナリコードに変換する
ーチは,機械学習や web,大規模検索の分
究されている.これまでの研究により,多く
ード化手法は次の形で書けることが分かって
b/sgn PfPWT
d+cQQ
d は D 次元の特徴ベクトル,b は長さ B ビ
リコード,c はオフセットベクトル,W は
換行列,fP}Q は任意の関数である(d の平均
ルになるようにあらかじめ変換されている
拘束条件なし 拘束条件あり
乗算回数 17,408 0
加算回数 17,280 約1,740
拘束条件の有無による計算量の比較
に,M-M のテーブルで表現できることが分かる.し
がって,図 9,10 に示した 2 種類のテーブルを用いるこ
で,高速に勾配特徴量を算出できるようになる.
b)バイナリコード化
特徴ベクトルをバイナリコードに変換するというアプロ
チは,機械学習や web,大規模検索の分野で活発に研
されている.これまでの研究により,多くのバイナリコ
ド化手法は次の形で書けることが分かっている.
b/sgn PfPWT
d+cQQ (11)
は D 次元の特徴ベクトル,b は長さ B ビットのバイナ
コード,c はオフセットベクトル,W は D 行 B 列の変
行列,fP}Q は任意の関数である(d の平均がゼロベクト
になるようにあらかじめ変換されている場合,c/0 と
てオフセット成分を無視することが多い).例えば,最
単純な random projections と呼ばれる手法では,W を
規分布に従う乱数で生成し,fP}Q を恒等関数としてい
.また Spectral Hashing11)
では fP}Q を非線形関数,W
ことが実験によ
て非常に都合が
なお,バイナ
決めることがで
観点から 128 b
本稿では,S
ト検出と特徴量
省メモリ化され
のまとめを示す
今後は,より
ができるように
理において,さ
記述においては
を圧縮するなど
の値しか取りえないことに着目すると,図 10 に示すよ
に,M-M のテーブルで表現できることが分かる.し
がって,図 9,10 に示した 2 種類のテーブルを用いるこ
で,高速に勾配特徴量を算出できるようになる.
b)バイナリコード化
特徴ベクトルをバイナリコードに変換するというアプロ
チは,機械学習や web,大規模検索の分野で活発に研
されている.これまでの研究により,多くのバイナリコ
ド化手法は次の形で書けることが分かっている.
b/sgn PfPWT
d+cQQ (11)
は D 次元の特徴ベクトル,b は長さ B ビットのバイナ
コード,c はオフセットベクトル,W は D 行 B 列の変
行列,fP}Q は任意の関数である(d の平均がゼロベクト
になるようにあらかじめ変換されている場合,c/0 と
てオフセット成分を無視することが多い).例えば,最
単純な random projections と呼ばれる手法では,W を
規分布に従う乱数で生成し,fP}Q を恒等関数としてい
であっても,密
ことが実験によ
て非常に都合が
なお,バイナ
決めることがで
観点から 128 b
本稿では,S
ト検出と特徴量
省メモリ化され
のまとめを示す
今後は,より
ができるように
理において,さ
記述においては
特徴ベクトルをバイナリコー
ーチは,機械学習や web,大
究されている.これまでの研究
ード化手法は次の形で書けるこ
b/sgn PfPWT
d+cQQ
d は D 次元の特徴ベクトル,
リコード,c はオフセットベク
換行列,fP}Q は任意の関数であ
ルになるようにあらかじめ変
してオフセット成分を無視す
も単純な random projections
正規分布に従う乱数で生成し
る.また Spectral Hashing11)
で
を学習データの主成分ベクトル
リコード生成を実現している.
CARD は random projection](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-132-320.jpg)
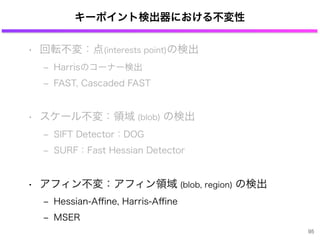
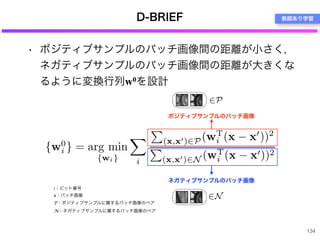
![D(Discriminative)-BRIEF [Trzcinski2012]
• ポジティブサンプルとネガティブサンプルを用いて教師
付き学習により変換行列を求める
• 学習用のパッチ画像生成
‒ ポジティブサンプル(同一キーポイントのパッチ画像のペア)
• 輝度変化,回転,キーポイント中心の位置ずれ
‒ ネガティブサンプル(異なるパッチ画像のペア)
• 異なるキーポイントのパッチ画像
133
教師あり学習
・・・
・・・
・・・
・・・
・・・
・・・
ポジティブサンプル ポジティブサンプル](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-133-320.jpg)

![BinBoost [Trzcinski2013]
• Boostingを用いたバイナリコードの生成
‒ 正例と負例のペア勾配画像を用意
‒ 正例 : 類似画像ペア
‒ 負例 : 非類似画像ペア
‒ 正例は同一の符号,負例は非同一の
符号を出力する弱識別器hd,kを選択
‒ 弱識別器hd,kの重みbd,kの計算
‒ 学習サンプルの重みを更新
137
バイナリコードのdビット目の出力
弱識別器の出力弱識別器の重み
教師あり学習](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-137-320.jpg)
![キーポイント記述子
139
手法 特徴量 表現 処理時間
メモリ
[bytes]
OpenCV
による実装
出版年
SIFT 勾配 実数ベクトル △ 128 1999
SURF 勾配 実数ベクトル ○ 64 2006
PCA-SIFT 勾配 実数ベクトル △ 36 2004
GLOH 勾配 実数ベクトル △ 128 2005
RIFF 輝度 実数ベクトル ○ 100 2010
BRIEF 輝度 バイナリコード ○ 32 2010
BRISK 輝度 バイナリコード ◎ 64 2011
ORB 輝度 バイナリコード ○ 32 2011
CARD 勾配 バイナリコード ○ 16 2011
FREAK 輝度 バイナリコード ◎ 16 2012
D-BRIEF 輝度 バイナリコード ◎ 8 2012
BinBoost 輝度 / 勾配 バイナリコード ○ 8 2013](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-139-320.jpg)
![Descripter
Robustness
Robustness
実数ベクトル型
記述子
バイナリーコード型
記述子
スケール
ローテーション Harris
[Harris1988] Good features to track
[Shi1993]
SUSAN
[Smith1995]
Harris-Laplace
[Mikolajczyk2001]
MSER
[Matas2002]
Harris-Affine
[Mikolajczyk2004]
FAST
[Rosten2006]
CenSurE
[Motilal2008]
SFOP
[Wolfgang2009]
AGAST
[Mair2010]
STAR
[Konolige2010]
Cascaded-FAST
[長谷川2013]
1988 1993 1995 1999 2001 2002 2004 2006 2008 20102009 2012 2013
1994 1999 2004 20102009 2012 20132000 2011
LBP
[Ojala1994]
Shape Contexts
[Belongie2000]
PCA-SIFT
[Ke2004]
20062005
GLOH
[Mikolajczyk2005]
2008
DAISY
[Tola2008] RIFF
[Takacs2010]
Root-SIFT
[Relja2012]
Color-SIFT
[van2010]
BRIEF
[Calonder2010]
BRISK
[Leutenegger2011]
LDB
[Yang2012]
FREAK
[Alahi2012]ORB
[Rublee2011]
D-BRIEF
[Tomasz2012]
CARD
[Ambai2011] BinBoost
[Tomasz2013]
LoG
[Lindeberg1998]
Detector
Invarant
Topics
OpenCV-α版公開 OpenCV1.0 OpenCV2.0
SIFT
[Lowe1999] SURF
[Bay2006]
KAZE
[Alcantarilla2012]
SIFT
[Lowe1999]
SURF
[Bay2006]
KAZE
[Alcantarilla2012]
SSE4.2
1998
アフィン](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-140-320.jpg)
![ホモグラフィ行列
• 視点変化等による座標位置の同定を行うために
用いるパラメータ
‒ 画像 と視点を変えた画像 がある場合
144
H =
h11 h12 h13
h21 h22 h23
h31 h32 h33
ホモグラフィ行列:
ホモグラフィ行列が既知であれば2画像間の対応が容易である
a2 = [xm, yn, 1]
T
a1 = [xm, yn, 1]
T
a1 = Ha2
a1 a2](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-144-320.jpg)

![性能評価の紹介 [Heinly2012]
146
Bikes
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
Trees
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
Blur Blur
同じ変化でも画像が異なると性能も変化](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-146-320.jpg)
![0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
性能評価の紹介 [Heinly2012]
147
Graffiti Bark
viewpoint change rotation+zoom
変化が異なると性能も変化](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-147-320.jpg)
![0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
H
arris-B
R
IEF
M
SER
-B
R
IEF
FA
ST-B
R
IEF
O
R
B
-B
R
IEF
B
R
ISK-B
R
IEF
SU
R
F-B
R
IEF
SIFT-B
R
IEF
H
arris-O
R
B
M
SER
-O
R
B
FA
ST-O
R
B
O
R
B
-O
R
B
B
R
ISK-O
R
B
SU
R
F-O
R
B
SIFT-O
R
B
H
arris-B
R
ISK
M
SER
-B
R
ISK
FA
ST-B
R
ISK
O
R
B
-B
R
ISK
B
R
ISK-B
R
ISK
SU
R
F-B
R
ISK
SIFT-B
R
ISK
SU
R
F-SU
R
F
SIFT-SIFT
Precision
性能評価の紹介 [Heinly2012]
148
Leuven UBC
intensity change JPEG noise](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-148-320.jpg)

![1.SIFT関連の参考文献
‒ [Lowe2004] D. G. Lowe, Distinctive image features from scale-invariant keypoints , Int.Journal of
Computer Vision,Vol.60, No.2, pp.91-110, 2004.
‒ [Lindeberg1998] T. Lindeberg, "Feature detection with automatic scale selection", Int.Journal of
Computer Vision, Vol. 30, No. 2, pp. 79-116, 1998.
‒ [高木2008] 高木雅成, 藤吉弘亘, SIFT特徴量を用いた交通道路標識認識 , 電気学会論文誌, Vol. 129-C, No. 5,
pp. 824-831, 2009.
‒ [Csurka2004] G. Csurka, C. Bray, C. Dance, L. Fan, Visual categorization with bags of keypoints ,
Workshop on Statistical Learning in Computer Vision,European Conference on Computer Vision, pp.
1‒22, 2004.
‒ [Brown2007] M. Brown, D. G. Lowe, Automatic Panoramic Image Stitching using Invariant Features ,
Int.Journal of Computer Vision,Vol. 74,
No.1, pp.59-73, 2007.
‒ [Mikolajczyk2005] K. Mikolajczyk, C. Schmid, GLOH A performance evaluation of local descriptors ,
IEEE tran. On Pattern Analysis and Machine Intelligence, pp.1615-1630, 2005.
‒ [Tola2007] E. Tola, V. Lepetit, F. Pascal, A Fast Local Descriptor for Dense Matching , Computer
Vision and Pattern Recognition, 2008.
155](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-155-320.jpg)
![2.キーポイント検出器の参考文献
‒ [Bay2006] B. Herbert, T. Tinne, G. Luc, SURF: Speeded Up Robust Features. European Conference
on Computer Vision , pp.404‒417, 2006.
‒ [Grabner2006] M. Grabner, H. Grabner, and H. Bischof, Fast Approximated SIFT, Asian Conference
on Computer Vision, pp.918‒927, 2006.
‒ [Sinha2006] S. N. Sinha, J. Frahm, M. Pollefeys, and Y. Genc, GPU-based Video Feature Tracking And
Matching, Workshop on Edge Computing Using New Commodity Architectures, 2006.
‒ [Mikolajczyk2004] K. Mikolajczyk, C. Schmid, Scale & affine invariant interest point detectors.
Int.Journal of Computer Vision , pp.63‒86, 2004.
‒ [Matas2007] J. Matas, O. Chum, M. Urban, T. Pajdla, Robust Wide Baseline Stereo from Maximally
Stable Extremal Regions , British Machine Vision Conference. pp. 384‒393, 2002.
‒ [Rosten2010] E. Rosten, R. Porter, T. Drummond, Faster and Better: A Machine Learning Approach
To Corner Detection , IEEE tran. On Pattern Analysis and Machine Intelligence, pp. 105-119, 2010.
‒ [長谷川2013] 長谷川昂宏, 山内悠嗣, 藤吉弘亘, 安倍満, 吉田悠一, Cascaded FASTによるキーポイント検出 ,
画像センシングシンポジウム, 2013.
156](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-156-320.jpg)
![3.キーポイント記述子の参考文献
‒ [Mikolajczyk2005] K. Mikolajczyk and C. Schmid, A Performance Evaluation of Local Descriptors,
IEEE Transactions on Pattern Analysis and Machine Intelligence, vol.27, no. 10, pp.31‒47, 2005.
‒ [Tola2008] E. Tola, V. Lepetit, F. Pascal, A Fast Local Descriptor for Dense Matching , Computer
Vision and Pattern Recognition, 2008.
‒ [Ke2004] Yan Ke, Rahul Sukthankar, PCA-SIFT: A more distinctive representation for local image
descriptors , Computer Vision and Pattern Recognition, pp.506-503, 2004.
‒ [Bay2006] H. Bay, T. Tuytelaars, L. Van Gool, SURF: Speeded Up Robust. Features , European
Conference on Computer Vision , pp.404-417, 2006.
‒ [M.Calonder2010] M. Calonder, V. Lepetit, C. Strecha, P. Fua, BRIEF: Binary Robust Independent
Elementary Features , European Conference on Computer Vision, pp.778-792, 2010.
‒ [Leutenegger2011] S. Leutenegger, M. Chli, R. Y. Siegwart BRISK: Binary Robust Invariant Scalable
Keypoints , Int. Conference on Computer Vision, 2011.
‒ [Rublee2011] E.Rublee, V.Rabaud, K.Konolige, G.Bradski ORB: an efficient alternative to SIFT or
SURF , Int.Conference on Computer Vision, 2011.
‒ [Alahi2012] A. Alahi, R. Ortiz, P. Vandergheynst, FREAK: Fast Retina Keypoint , IEEE Conference on
Computer Vision and Pattern Recognition, 2012.
‒ [Ambai2011] M. Ambai, Y. Yoshida, CARD: Compact And Real-time Descriptors , Int. Conference on
Computer Vision, 2011.
157](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-157-320.jpg)
![3.キーポイント記述子の参考文献
‒ [Trzchinski2012] T. Tomasz, L. Vincent, Efficient Discriminative Projections for Compact Binary
Descriptors , European Conference on Computer Vision,
pp.228‒242, 2012.
‒ [Trzcinski2013] T. Tomasz, M. Christoudias, P. Fua, V. Lepetit, Boosting Binary Keypoint Descriptors ,
IEEE Conference on Computer Vision and Pattern Recognition, 2013.
158](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-158-320.jpg)
![その他の参考文献
• 評価・実装
‒ [Heinly2012] J. Heinly, E. Dunn, J, Frahm, Comparative Evaluation of Binary Features , European
Conference on Computer Vision, 2012.
• チュートリアル
- Andrea Vedaldi, Jiri Matas, Krystian Mikolajczyk, Tinne Tuytelaars, Cordelia Schmid, Andrew
Zisserman, modern features: advances, applications and software , European Conference on
Computer Vision, 2012.
• 解説記事
- [藤吉2011] 藤吉 弘亘, 安倍 満, 局所勾配特徴抽出 -SIFT以降のアプローチ- , 精密工学会誌, Vol.77, No.
12, pp.1109-1116, 2011.
• サーベイ
- [Tuytelaars2008] T. Tuytelaars, K. Mikolajczyk, Local invariant feature detectors: a survey ,
Foundations and Trends® in Computer Graphics and Vision, Vol.3, No.3, 2008.
• Mendeley
- グループ名:ImageLocalFeature
159](https://image.slidesharecdn.com/miru2013tutorial-130728113105-phpapp01/85/MIRU2013-SIFT-159-320.jpg)
















![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)


![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)















![-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2014-os-recognition-140612-140611032253-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)



























