Download as PDF, PPTX


![Figure 1. Local-to-global registration result, obtained using the
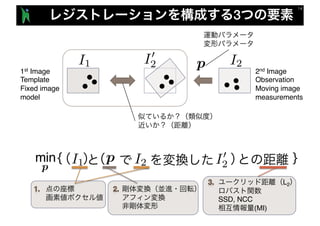
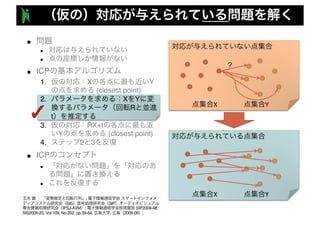
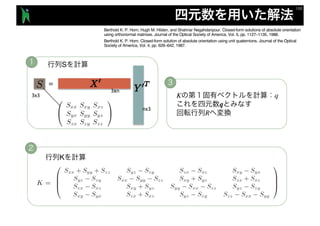
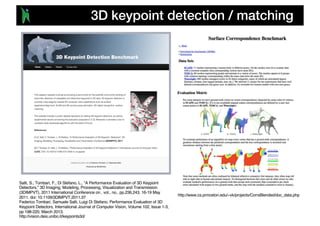
1. We introduce the use of viewpoint descriptors within
the viewpoint-dictionary based registration frame-
work, proposed in [1]. We demonstrate that replac-
ing the dictionary clouds, used in [1], with panoramic
range-images, used as viewpoint descriptors, leads to
considerable reduction in memory requirements and
computational complexity, without loss in registration
accuracy.
2. We propose the use of phase-correlation-based im-
age registration [5, 10], for panoramic range-image
matching, and to enable efficient dictionary search and
rapid local-to-global initial (coarse) registration, with
or without prior knowledge such as GPS data).
2. Related work
ICCV2017
nt
ansformation T0
}
m coarsest to finest
q. 18,19)
T (Eq. 29,30)
map to SE(3)
matchable frag-
bust graph opti-
ts;
s {(Pi, Pj)} and
ween matchable
nd a camera cal-
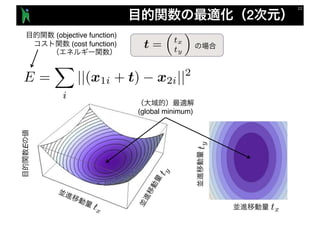
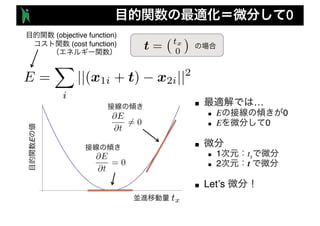
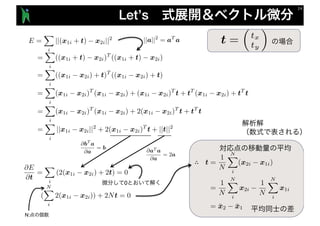
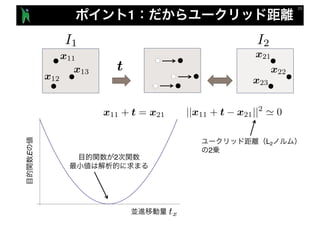
an objective de-
} [45];
mesh model for
ns 3 and 4 to re-
eate a fragment
RegistrationReconstruction
CZK [4] Ours
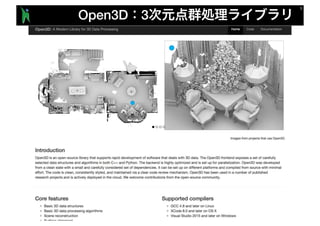
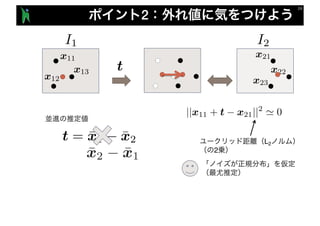
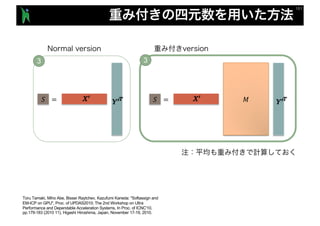
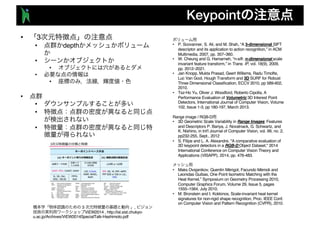
Figure 1. Left: failure of the ICP algorithm (top) leads to erroneous
reconstruction (bottom). Right: our colored point cloud registra-
tion algorithm locks the alignment along the tangent plane as well
as the normal direction (top), yielding an accurate scene model
(bottom).
rate fragment alignment. In particular, the new algorithm is
considerably more robust to slippage along flat surfaces, as
shown in Figure 1. This replaces Step 3.
6. Dataset
To our knowledge, no publicly available RGB-D dataset
provides dense ground-truth surface geometry across large-
scale real-world scenes. To complement existing datasets,
we have created ground-truth models of five complete in-
door environments using a high-end laser scanner, and cap-
tured RGB-D video sequences of these scenes. This data
enables quantitative evaluation of real-world scene recon-
struction and will be made publicly available.
We scanned five scenes: Apartment, Bedroom, Board-
Colored Point Cloud Registration Revisited, Jaesik Park, Qian-Yi Zhou,
Vladlen Koltun; ICCV2017, pp. 143-152
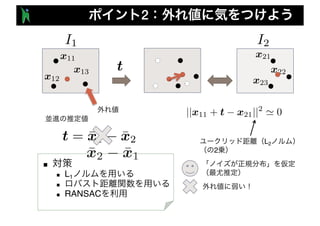
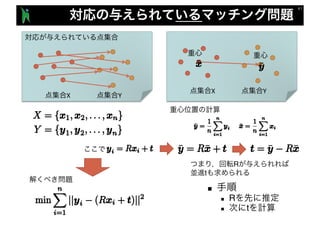
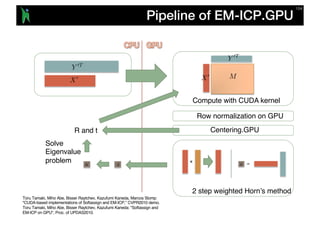
Figure 2. The overall procedure of the proposed method.
Moreno et al. [36] proposed an incremental plane mapping
scheme in which the relation between planes is identified by
point features. Several studies [13, 2, 39] exploited planes
and points to find frame-to-frame camera pose and to define
an objective function for bundle adjustment. Ma et al. [25]
estimated a global plane model and frame-to-frame pose in
an alternative way in the EM framework. Zhang et al. [48]
proposed an interactive reconstruction algorithm, in which
the algorithm guides the person to capture designated spots.
The proposed method overcomes aforementioned prob-
lems through the layout-constrained global registration.
The scene layout estimation problem has been tackled in
the field of scene understanding [10, 15, 19] and object de-
tection [17]. Some researches [30, 40, 50] proposed to en-
force the global regularity (e.g. parallelism, orthogonality,
and coplanarity) of the scene structures in an iterative fash-
ion, assuming that well-aligned but noisy point clouds are
given as input. However, we consider inaccurately aligned
point clouds, i.e., owing to drift errors as shown in the left
of Fig. 1. Therefore, we perform the layout estimation and
global registration jointly, and in particular, the proposed
dominant plane estimation based on energy minimization
provides locally optimal dominant planes without regard to
the general global regularities.
3.1. Initial Registration
For initial registration, we partially reconstruct the cap-
tured indoor scene to produce a set of scene fragments and
then register them in the world coordinate system, which is
similar to the previous study of Choi et al. [9]. Here, the un-
derlying assumption is that each scene fragment contains a
negligible amount of accumulation errors so that the large-
scale 3D reconstruction problem turns into the problem of
aligning all the scene fragments. To construct a scene frag-
ment Fi ∈ F, we simply use KinectFusion [27] for every
N frames, e.g. 50, which is a volumetric approach to recon-
struct a scene with truncated signed distance functions [12].
Afterwards, we find pairwise transformations Ti,i+1 for all
pairs of the consecutive fragments and align all the frag-
ments in the world coordinate system based on sequential
multiplication of the pairwise transformations.
Loop closure detection: The set of the registered frag-
ments via the sequential multiplication of the pairwise
transformations usually has a large amount of accumulated
pose errors as well as misaligned range data. Therefore, it
is necessary to identify loop closures to diffuse drift errors
across all the fragments. To detect loop closures, we align
all pairs of the inconsecutive fragments using the FPFH de-
Joint Layout Estimation and Global Multi-View Registration for Indoor Reconstruction,
Jeong-Kyun Lee, Jaewon Yea, Min-Gyu Park, Kuk-Jin Yoon; ICCV2017, pp. 162-171
Local-To-Global Point Cloud Registration Using a Dictionary of Viewpoint
Descriptors,David Avidar, David Malah, Meir Barzohar; ICCV2017, pp. 891-899
Point Set Registration With Global-Local Correspondence and Transformation
Estimation, Su Zhang, Yang Yang, Kun Yang, Yi Luo, Sim-Heng Ong; ICCV2017, pp.
2669-2677](https://image.slidesharecdn.com/20180531robotseminar-181009030921/85/3-Open3D-3-66-320.jpg)
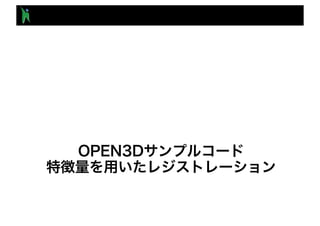
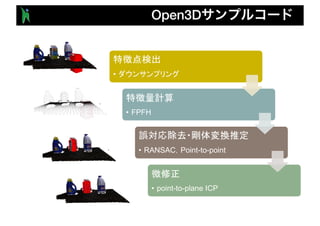
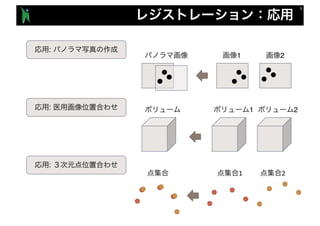
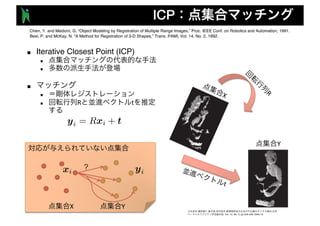
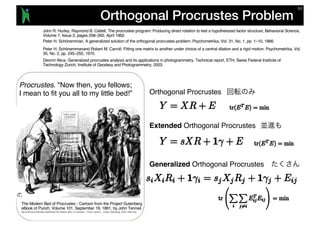
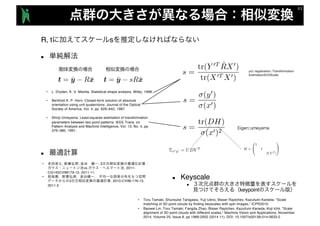
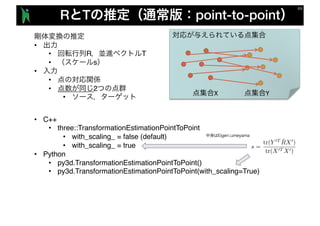
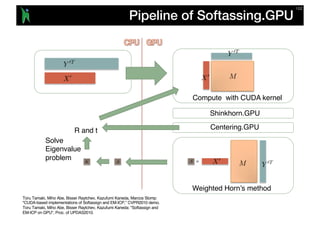
![RANSAC R T
#
checker = [py3d.CorrespondenceCheckerBasedOnEdgeLength(0.9),
#
py3d.CorrespondenceCheckerBasedOnDistance(size * 2)]
#
est_ptp = py3d.TransformationEstimationPointToPoint()
criteria = py3d.RANSACConvergenceCriteria(max_iteration=40000, #
max_validation=500)
# RANSAC
result1 = RANSAC(model_d, scene_d, #
model_f, scene_f, #
max_correspondence_distance=size * 2, #
estimation_method=est_ptp, # point-to-point
ransac_n=4, # RANSAC 3
checkers=checker,
criteria=criteria)
show(model, scene, result1.transformation)](https://image.slidesharecdn.com/20180531robotseminar-181009030921/85/3-Open3D-3-76-320.jpg)
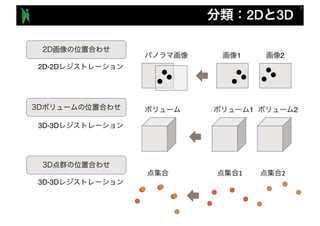
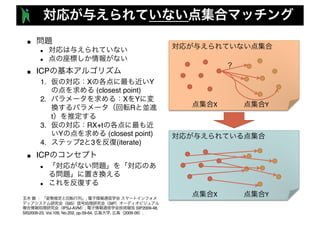
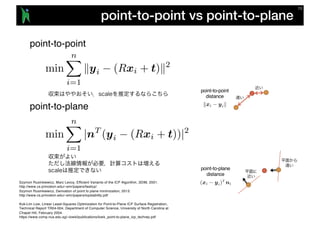
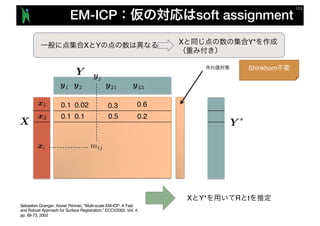
![RANSAC R T
#
checker = [py3d.CorrespondenceCheckerBasedOnEdgeLength(0.9),
#
py3d.CorrespondenceCheckerBasedOnDistance(size * 2)]
#
est_ptp = py3d.TransformationEstimationPointToPoint()
criteria = py3d.RANSACConvergenceCriteria(max_iteration=40000, #
max_validation=500)
# RANSAC
result1 = RANSAC(model_d, scene_d, #
model_f, scene_f, #
max_correspondence_distance=size * 2, #
estimation_method=est_ptp, # point-to-point
ransac_n=4, # RANSAC 3
checkers=checker,
criteria=criteria)
show(model, scene, result1.transformation)](https://image.slidesharecdn.com/20180531robotseminar-181009030921/85/3-Open3D-3-77-320.jpg)

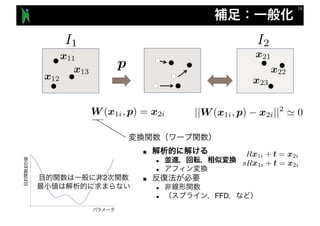
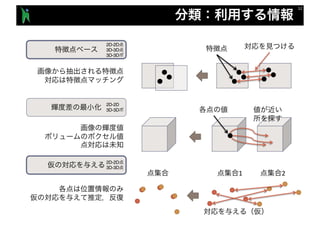
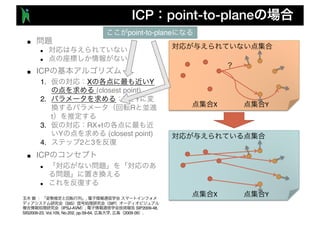
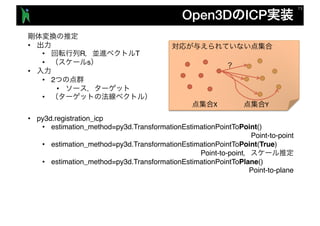
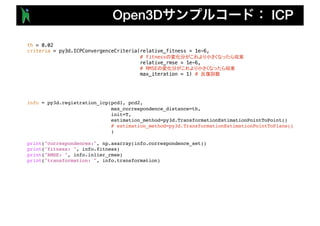
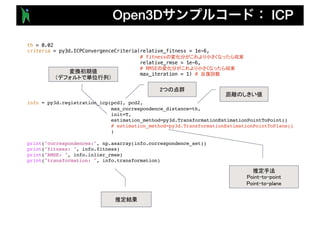
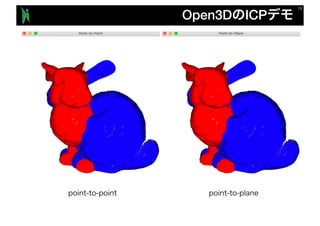
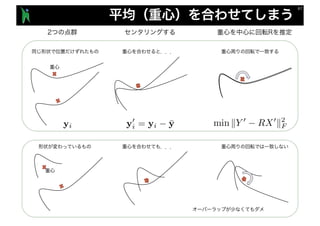
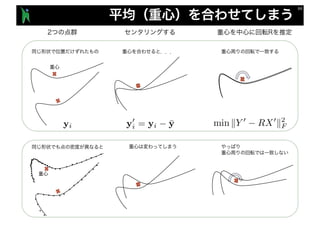
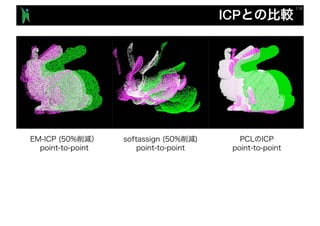
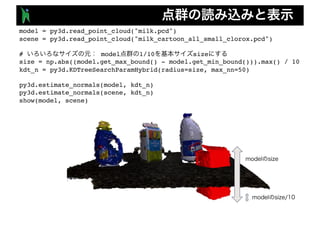
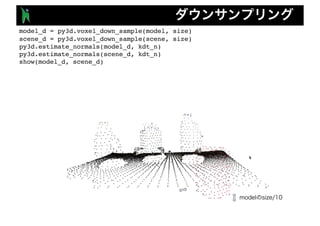
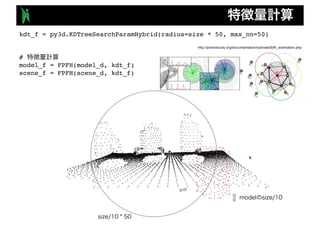
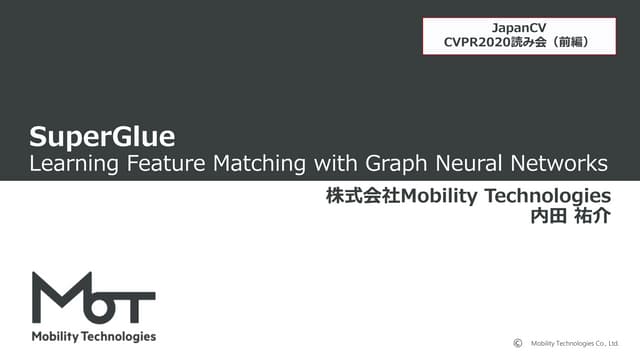
The document discusses various algorithms and techniques for point cloud registration, including the Iterative Closest Point (ICP) algorithm and its variations in aligning 3D point sets. It references numerous studies and methods for optimizing transformations, particularly focusing on point-to-point and point-to-plane distances. Additionally, it details computational approaches and tools available in programming libraries for effective 3D modeling and transformation estimation.









![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)

![[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018)](https://cdn.slidesharecdn.com/ss_thumbnails/201807263dv-180728060959-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metr...](https://cdn.slidesharecdn.com/ss_thumbnails/181214dlpointnet-181214053349-thumbnail.jpg?width=640&height=640&fit=bounds)






![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Deep High-Resolution Representation Learning for Human Pose Estimation](https://cdn.slidesharecdn.com/ss_thumbnails/20190517hrnet-190517005504-thumbnail.jpg?width=640&height=640&fit=bounds)