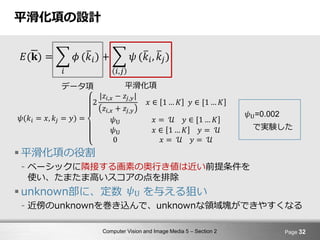
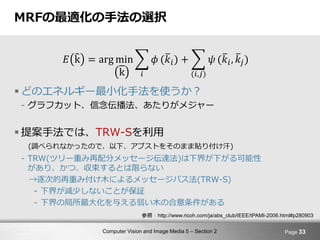
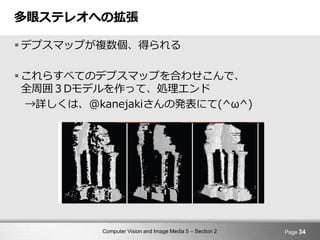
Computer Vision andImage Media 5 – Section 2
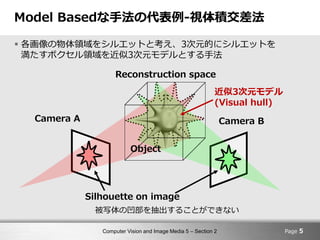
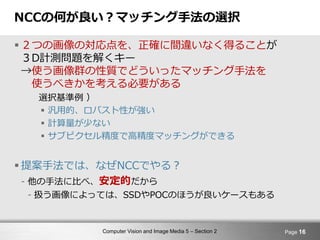
Model Basedな手法の代表例-視体積交差法
各画像の物体領域をシルエットと考え、3次元的にシルエットを
満たすボクセル領域を近似3次元モデルとする手法
Page 5
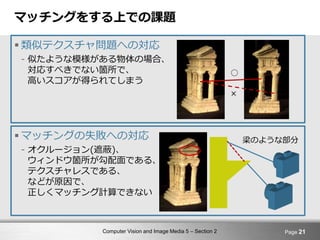
被写体の凹部を抽出することができない
Camera B
Reconstruction space
Camera A
Silhouette on image
Object
近似3次元モデル
(Visual hull)
7.
Computer Vision andImage Media 5 – Section 2
CV5本にて解説されている論文について
[13] using multiple hypotheses to improve depth-maps for multi-view stereos
Neill D.F. Campbell, George Vogiatzis, Carlos Hernandez, and Roberto Cipolla
の
“ 近傍画像からのデプスマップ生成手法 ”
をベースに紹介
本論分の概要を、ざっと言うと、、、
- NCCすげー
- MRFすげー
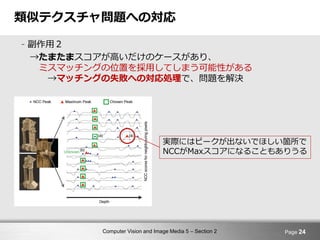
Page 6
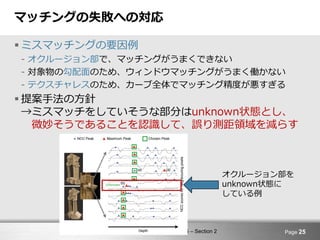
Computer Vision andImage Media 5 – Section 2
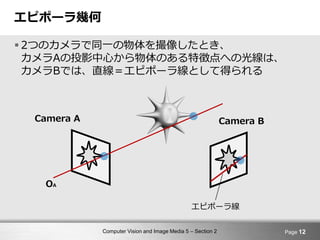
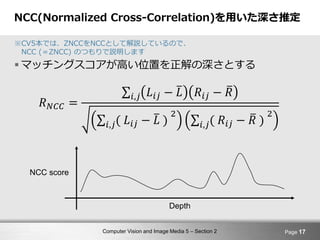
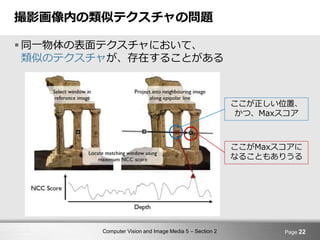
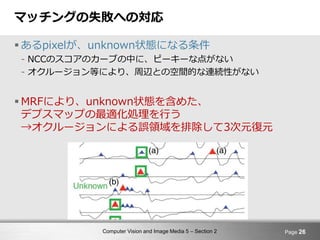
エピポーラ幾何
2つのカメラで同一の物体を撮像したとき、
カメラAの投影中心から物体のある特徴点への光線は、
カメラBでは、直線=エピポーラ線として得られる
Page 12
Camera BCamera A
OA
エピポーラ線
14.
Computer Vision andImage Media 5 – Section 2
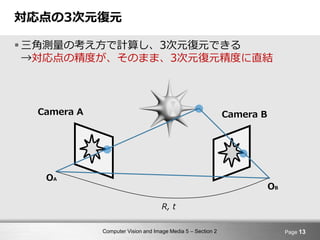
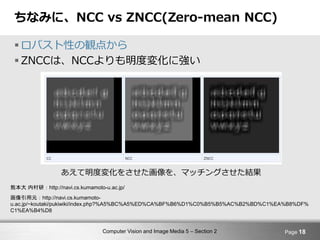
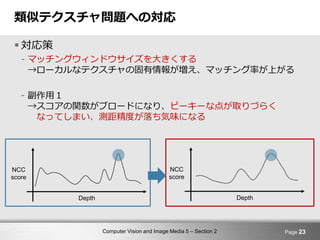
対応点の3次元復元
三角測量の考え方で計算し、3次元復元できる
→対応点の精度が、そのまま、3次元復元精度に直結
Page 13
Camera BCamera A
OA
OB
R, t




![Computer Vision and Image Media 5 – Section 2
CV5本にて解説されている論文について
[13] using multiple hypotheses to improve depth-maps for multi-view stereos
Neill D.F. Campbell, George Vogiatzis, Carlos Hernandez, and Roberto Cipolla
の
“ 近傍画像からのデプスマップ生成手法 ”
をベースに紹介
本論分の概要を、ざっと言うと、、、
- NCCすげー
- MRFすげー
Page 6](https://image.slidesharecdn.com/20150328cvsumisumithv1-150401014457-conversion-gate01/85/20150328-cv-sumisumith-_v1-3-7-320.jpg)
![Computer Vision and Image Media 5 – Section 2
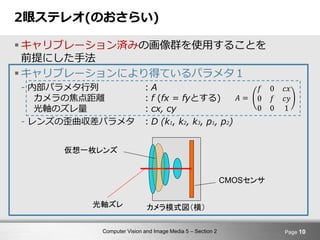
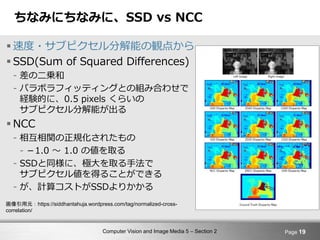
キャリブレーションにより得ているパラメタ2
- 外部パラメタ行列 :[R|t]
回転行列 :R
並進ベクトル :t
2眼ステレオ(のおさらい)
Page 11
R, t
𝑅|t = 𝑟1 𝑟2 𝑟3 𝑡
※すべて列ベクトル](https://image.slidesharecdn.com/20150328cvsumisumithv1-150401014457-conversion-gate01/85/20150328-cv-sumisumith-_v1-3-12-320.jpg)














![SSII2021 [TS1] Visual SLAM ~カメラ幾何の基礎から最近の技術動向まで~](https://cdn.slidesharecdn.com/ss_thumbnails/ts1-01-210607042113-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [OS3] 広域環境の3D計測と認識 ~ 人が活動する場のセンシングとモデル化 ~(オーガナイザーによる冒頭の導入)](https://cdn.slidesharecdn.com/ss_thumbnails/os3-01-210605061816-thumbnail.jpg?width=640&height=640&fit=bounds)






















![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)














